Arxiv:1302.0804V2 [Math.DG] 28 Apr 2014 Geometries in Analyzing the RF of 2–Dimensional Geometries Is Well Established and Proven to Be Effective [6, 12]
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Self-Dual Polygons and Self-Dual Curves, with D. Fuchs
Funct. Anal. Other Math. (2009) 2: 203–220 DOI 10.1007/s11853-008-0020-5 FAOM Self-dual polygons and self-dual curves Dmitry Fuchs · Serge Tabachnikov Received: 23 July 2007 / Revised: 1 September 2007 / Published online: 20 November 2008 © PHASIS GmbH and Springer-Verlag 2008 Abstract We study projectively self-dual polygons and curves in the projective plane. Our results provide a partial answer to problem No 1994-17 in the book of Arnold’s problems (2004). Keywords Projective plane · Projective duality · Polygons · Legendrian curves · Radon curves Mathematics Subject Classification (2000) 51A99 · 53A20 1 Introduction The projective plane P is the projectivization of 3-dimensional space V (we consider the cases of two ground fields, R and C); the points and the lines of P are 1- and 2-dimensional subspaces of V . The dual projective plane P ∗ is the projectivization of the dual space V ∗. Assign to a subspace in V its annihilator in V ∗. This gives a correspondence between the points in P and the lines in P ∗, and between the lines in P and the points in P ∗, called the projective duality. Projective duality preserves the incidence relation: if a point A belongs to a line B in P then the dual point B∗ belongs to the dual line A∗ in P ∗. Projective duality is an involution: (A∗)∗ = A. Projective duality extends to polygons in P .Ann-gon is a cyclically ordered collection of n points and n lines satisfying the incidences: two consecutive vertices lie on the respec- tive side, and two consecutive sides pass through the respective vertex. -

Volume 2 Shape and Space
Volume 2 Shape and Space Colin Foster Introduction Teachers are busy people, so I’ll be brief. Let me tell you what this book isn’t. • It isn’t a book you have to make time to read; it’s a book that will save you time. Take it into the classroom and use ideas from it straight away. Anything requiring preparation or equipment (e.g., photocopies, scissors, an overhead projector, etc.) begins with the word “NEED” in bold followed by the details. • It isn’t a scheme of work, and it isn’t even arranged by age or pupil “level”. Many of the ideas can be used equally well with pupils at different ages and stages. Instead the items are simply arranged by topic. (There is, however, an index at the back linking the “key objectives” from the Key Stage 3 Framework to the sections in these three volumes.) The three volumes cover Number and Algebra (1), Shape and Space (2) and Probability, Statistics, Numeracy and ICT (3). • It isn’t a book of exercises or worksheets. Although you’re welcome to photocopy anything you wish, photocopying is expensive and very little here needs to be photocopied for pupils. Most of the material is intended to be presented by the teacher orally or on the board. Answers and comments are given on the right side of most of the pages or sometimes on separate pages as explained. This is a book to make notes in. Cross out anything you don’t like or would never use. Add in your own ideas or references to other resources. -

Fun Problems in Geometry and Beyond
Symmetry, Integrability and Geometry: Methods and Applications SIGMA 15 (2019), 097, 21 pages Fun Problems in Geometry and Beyond Boris KHESIN †y and Serge TABACHNIKOV ‡z †y Department of Mathematics, University of Toronto, Toronto, ON M5S 2E4, Canada E-mail: [email protected] URL: http://www.math.toronto.edu/khesin/ ‡z Department of Mathematics, Pennsylvania State University, University Park, PA 16802, USA E-mail: [email protected] URL: http://www.personal.psu.edu/sot2/ Received November 17, 2019; Published online December 11, 2019 https://doi.org/10.3842/SIGMA.2019.097 Abstract. We discuss fun problems, vaguely related to notions and theorems of a course in differential geometry. This paper can be regarded as a weekend “treasure\treasure chest”chest" supplemen- ting the course weekday lecture notes. The problems and solutions are not original, while their relation to the course might be so. Key words: clocks; spot it!; hunters; parking; frames; tangents; algebra; geometry 2010 Mathematics Subject Classification: 00A08; 00A09 To Dmitry Borisovich Fuchs on the occasion of his 80th anniversary Áîëüøå çàäà÷, õîðîøèõ è ðàçíûõ! attributed to Winston Churchill (1918) This is a belated birthday present to Dmitry Borisovich Fuchs, a mathematician young at 1 heart.1 Many of these problems belong to the mathematical folklore. We did not attempt to trace them back to their origins (which might be impossible anyway), and the given references are not necessarily the first mentioning of these problems. 1 Problems 1. AA wall wall clock clock has has the the minute minute and and hour hour hands hands of of equal equal length. -

A Discrete Representation of Einstein's Geometric Theory of Gravitation: the Fundamental Role of Dual Tessellations in Regge Calculus
A Discrete Representation of Einstein’s Geometric Theory of Gravitation: The Fundamental Role of Dual Tessellations in Regge Calculus Jonathan R. McDonald and Warner A. Miller Department of Physics, Florida Atlantic University, Boca Raton, FL 33431, USA [email protected] In 1961 Tullio Regge provided us with a beautiful lattice representation of Einstein’s geometric theory of gravity. This Regge Calculus (RC) is strikingly different from the more usual finite difference and finite element discretizations of gravity. In RC the fundamental principles of General Relativity are applied directly to a tessellated spacetime geometry. In this manuscript, and in the spirit of this conference, we reexamine the foundations of RC and emphasize the central role that the Voronoi and Delaunay lattices play in this discrete theory. In particular we describe, for the first time, a geometric construction of the scalar curvature invariant at a vertex. This derivation makes use of a new fundamental lattice cell built from elements inherited from both the simplicial (Delaunay) spacetime and its circumcentric dual (Voronoi) lattice. The orthogonality properties between these two lattices yield an expression for the vertex-based scalar curvature which is strikingly similar to the corre- sponding and more familiar hinge-based expression in RC (deficit angle per unit Voronoi dual area). In particular, we show that the scalar curvature is simply a vertex-based weighted average of deficits per weighted average of dual areas. What is most striking to us is how naturally spacetime is represented by Voronoi and Delaunay structures and that the laws of gravity appear to be encoded locally on the lattice spacetime with less complexity than in the continuum, yet the continuum is recovered by convergence in mean. -

Minimality and Mutation-Equivalence of Polygons
Forum of Mathematics, Sigma (2017), Vol. 5, e18, 48 pages 1 doi:10.1017/fms.2017.10 MINIMALITY AND MUTATION-EQUIVALENCE OF POLYGONS ALEXANDER KASPRZYK1, BENJAMIN NILL2 and THOMAS PRINCE3 1 School of Mathematical Sciences, University of Nottingham, University Park, Nottingham NG7 2RD, UK; email: [email protected] 2 Fakultat¨ fur¨ Mathematik, Otto-von-Guericke-Universitat¨ Magdeburg, Postschließfach 4120, 39016 Magdeburg, Germany; email: [email protected] 3 Department of Mathematics, Imperial College London, 180 Queen’s Gate, London SW7 2AZ, UK; email: [email protected] Received 1 April 2015; accepted 3 March 2017 Abstract We introduce a concept of minimality for Fano polygons. We show that, up to mutation, there are only finitely many Fano polygons with given singularity content, and give an algorithm to determine representatives for all mutation-equivalence classes of such polygons. This is a key step in a program to classify orbifold del Pezzo surfaces using mirror symmetry. As an application, we classify all Fano polygons such that the corresponding toric surface is qG-deformation-equivalent to either (i) a smooth surface; or (ii) a surface with only singularities of type 1=3.1; 1/. 1. Introduction 1.1. An introduction from the viewpoint of algebraic geometry and mirror VD ⊗ symmetry. A Fano polygon P is a convex polytope in NQ N Z Q, where N is a rank-two lattice, with primitive vertices V.P/ in N such that the origin is ◦ contained in its strict interior, 0 2 P . A Fano polygon defines a toric surface X P given by the spanning fan (also commonly referred to as the face fan or central fan) of P; that is, X P is defined by the fan whose cones are spanned by the faces of P. -
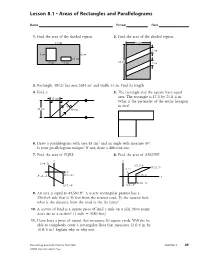
Lesson 8.1 • Areas of Rectangles and Parallelograms
Lesson 8.1 • Areas of Rectangles and Parallelograms Name Period Date 1. Find the area of the shaded region. 2. Find the area of the shaded region. 17 cm 9 cm 2 cm 5 cm 8 cm 1.5 cm 4 cm 4 cm 13 cm 2 cm 3. Rectangle ABCD has area 2684 m2 and width 44 m. Find its length. 4. Find x. 5. The rectangle and the square have equal 15 cm area. The rectangle is 12 ft by 21 ft 4 in. What is the perimeter of the entire hexagon x in feet? 26 cm 39 cm 6. Draw a parallelogram with area 85 cm2 and an angle with measure 40°. Is your parallelogram unique? If not, draw a different one. 7. Find the area of PQRS. 8. Find the area of ABCDEF. y y S(–4, 5) (15, 7)E D(21, 7) (4, 2) x F R(7, –1) C(10, 2) P(–4, –3) x B(10, –5) Q(7, –9) A(4, –5) 9. An acre is equal to 43,560 ft2. A 4-acre rectangular pasture has a 250-foot side that is 40 feet from the nearest road. To the nearest foot, what is the distance from the road to the far fence? 10. A section of land is a square piece of land 1 mile on a side. How many acres are in a section? (1 mile ϭ 5280 feet) 11. Dana buys a piece of carpet that measures 20 square yards. Will she be able to completely cover a rectangular floor that measures 12 ft 6 in. -

LATTICE POLYGONS and the NUMBER 12 1. Prologue in This
LATTICE POLYGONS AND THE NUMBER 12 BJORN POONEN AND FERNANDO RODRIGUEZ-VILLEGAS 1. Prologue In this article, we discuss a theorem about polygons in the plane, which involves in an intriguing manner the number 12. The statement of the theorem is completely elementary, but its proofs display a surprisingly rich variety of methods, and at least some of them suggest connections between branches of mathematics that on the surface appear to have little to do with one another. We describe four proofs of the main theorem, but we give full details only for proof 4, which uses modular forms. Proofs 2 and 3, and implicitly the theorem, appear in [4]. 2. The Theorem A lattice polygon is a polygon P in the plane R2 all of whose vertices lie in the lattice Z2 of points with integer coordinates. It is convex if for any two points P and Q in the polygon, the segment PQ is contained in the polygon. Let `(P) be the total number of lattice points on the boundary of P. If we define the discrete length of a line segment connecting two lattice points to be the number of lattice points on the segment (including the endpoints) minus 1, then `(P) equals also the sum of the discrete lengths of the sides of P. We are interested in convex lattice polygons such that (0; 0) is the only lattice point in the _ interior of P. For such P, we can define a dual polygon P as follows. Let p1, p2,..., pn be the vectors representing the lattice points along the boundary of P, in counterclockwise order. -

Reflexive Polygons and Loops
Reflexive Polygons and Loops by Dongmin Roh A THESIS submitted to University of Oregon in partial fulfillment of the requirements for the honors degree of Mathematics Presented May 24, 2016 Commencement June 2016 AN ABSTRACT OF THE THESIS OF Dongmin Roh for the degree of Mathematics in Mathematics presented on May 24, 2016. Title: Reflexive Polygons and Loops A reflexive polytope is a special type of convex lattice polytope that only contains the origin as its interior lattice points. Its dual is also reflexive; they form a mirror pair. The Ehrhart series of a reflexive polytope exhibits a symmetric behavior as well. In this paper, we focus on the case when the dimension is 2. Reflexive polygons have a fascinating property that the number of boundary points of itself and its dual always sum up to 12. Furthermore, we extend this idea to a notion of reflexive polygons of higher index, called l-reflexive polygons, and generalize the case to dropping the condition of the convexivity of polygons, known as l-reflexive loops. We will observe that the magical 'number 12' extends to l-reflexive polygons and l-reflexive loops. We will look at how a given l-reflexive can be thought of as a 1-reflexive in the lattice generated by its boundary lattice points. Lastly, we observe that the roots of the Ehrhart Polynomial having real part equal to −1=2 imply that the corresponding polytope is reflexive. ACKNOWLEDGEMENTS I would like to thank my advisor, Chris Sinclair, for meeting countlessly many times to guide me throughout the year, and most importantly for his encouraging words that kept me stay optimistic. -

Self-Dual Polygons
(m)-Self-Dual Polygons THESIS Submitted in Partial Fulfillment of the Requirements for the Degree of BACHELOR OF SCIENCE (Mathematics) at the POLYTECHNIC INSTITUTE OF NEW YORK UNIVERSITY by Valentin Zakharevich June 2010 (m)-Self-Dual Polygons THESIS Submitted in Partial Fulfillment of the Requirements for the Degree of BACHELOR OF SCIENCE (Mathematics) at the POLYTECHNIC INSTITUTE OF NEW YORK UNIVERSITY by Valentin Zakharevich June 2010 Curriculum Vitae:Valentin Zakharevich Date and Place of Birth: June 21st 1988, Tashkent, Uzbekistan. Education: 2006-2010 : B.S. Polytechnic Institute of NYU January 2009 - May 2009: Independent University of Moscow (Math in Moscow) September 2008 - December 2008: Penn State University(MASS) iii ABSTRACT (m)-Self-Dual Polygons by Valentin Zakharevich Advisor: Sergei Tabachnikov Advisor: Franziska Berger Submitted in Partial Fulfillment of the Requirements for the Degree of Bachelor of Science (Mathematics) June 2010 Given a polygon P = {A0, A1,...,An−1} with n vertices in the projective space ∗ CP2, we consider the polygon Tm(P ) in the dual space CP2 whose vertices correspond to the m-diagonals of P , i.e., the diagonals of the form [Ai, Ai+m]. This is a general- ization of the classical notion of dual polygons where m is taken to be 1. We ask the question, ”When is P projectively equivalent to Tm(P )?” and characterize all poly- gons having this self-dual property. Further, we give an explicit construction for all polygons P which are projectively equivalent to Tm(P ) and calculate the dimension of the space of such self-dual polygons. iv Contents 1 Introduction 1 2 Projective Geometry 3 2.1 ProjectiveSpaces ............................ -

Elementary Surprises in Projective Geometry
Elementary Surprises in Projective Geometry Richard Evan Schwartz∗ and Serge Tabachnikovy The classical theorems in projective geometry involve constructions based on points and straight lines. A general feature of these theorems is that a surprising coincidence awaits the reader who makes the construction. One example of this is Pappus's theorem. One starts with 6 points, 3 of which are contained on one line and 3 of which are contained on another. Drawing the additional lines shown in Figure 1, one sees that the 3 middle (blue) points are also contained on a line. Figure 1: Pappus's Theorem arXiv:0910.1952v2 [math.DG] 5 Nov 2009 Pappus's Theorem goes back about 1700 years. In 1639, Blaise Pascal discovered a generalization of Pappus's Theorem. In Pascal's Theorem, the 6 green points are contained in a conic section, as shown on the left hand side of Figure 2. One recovers Pappus's Theorem as a kind of limit, as the conic section stretches out and degenerates into a pair of straight lines. ∗Supported by N.S.F. Research Grant DMS-0072607. ySupported by N.S.F. Research Grant DMS-0555803. Many thanks to MPIM-Bonn for its hospitality. 1 Figure 2: Pascal's Theorem and Brian¸con's Theorem Another closely related theorem is Brian¸con'sTheorem. This time, the 6 green points are the vertices of a hexagon that is circumscribed about a conic section, as shown on the right hand side of Figure 2, and the surprise is that the 3 thickly drawn diagonals intersect in a point. -

Course Notes Are Organized Similarly to the Lectures
Preface This volume documents the full day course Discrete Differential Geometry: An Applied Introduction pre- sented at SIGGRAPH ’05 on 31 July 2005. These notes supplement the lectures given by Mathieu Desbrun, Eitan Grinspun, and Peter Schr¨oder,compiling contributions from: Pierre Alliez, Alexander Bobenko, David Cohen-Steiner, Sharif Elcott, Eva Kanso, Liliya Kharevych, Adrian Secord, John M. Sullivan, Yiy- ing Tong, Mariette Yvinec. The behavior of physical systems is typically described by a set of continuous equations using tools such as geometric mechanics and differential geometry to analyze and capture their properties. For purposes of computation one must derive discrete (in space and time) representations of the underlying equations. Researchers in a variety of areas have discovered that theories, which are discrete from the start, and have key geometric properties built into their discrete description can often more readily yield robust numerical simulations which are true to the underlying continuous systems: they exactly preserve invariants of the continuous systems in the discrete computational realm. A chapter-by-chapter synopsis The course notes are organized similarly to the lectures. Chapter 1 presents an introduction to discrete differential geometry in the context of a discussion of curves and cur- vature. The overarching themes introduced there, convergence and structure preservation, make repeated appearances throughout the entire volume. Chapter 2 addresses the question of which quantities one should measure on a discrete object such as a triangle mesh, and how one should define such measurements. This exploration yields a host of measurements such as length, area, mean curvature, etc., and these in turn form the basis for various applications described later on. -

HSF: Image Compression from Segmentation Using Duality and Mesh Compression
HSF: Image Compression From Segmentation using Duality and Mesh Compression Emily Jones Robert Pieh Bjorn Wastvedt advised by Professor Olaf Hall-Holt MSCS Department St. Olaf College Northfield, MN 55057 {jonesek, pieh, wastvedb}@stolaf.edu Abstract We propose and implement a new image compression algorithm. Beginning with a planar straight-line graph created via image segmentation software, we create a modified dual graph consisting of triangles, with a triangle face corresponding to every polygon vertex. Using the Edgebreaker algorithm, we compress the connectivity of the triangle mesh (at a rate of about two bits per polygonal vertex) and encode the vertex and color data in the order of the connectivity of the triangle mesh. From this connectivity data, we can reconstruct the triangle mesh from which the polygonal dual graph (the original segmentation) is rebuilt. For high compression rates, we expect that our algorithm's compression ratios will be competitive with those of the JPEG and TIFF file formats, while still retaining the essential features of the image. 1. Introduction Image compression is becoming increasingly important as image resolutions continue to grow and demand increases for transferring and storing the images. Although the standard compression methods such as JPEG and TIFF have proven themselves highly effective in many cases, it is important to continue to examine new and unexplored avenues of image compression. Traditional image compression techniques make use of a wide variety of strategies.[2] Most simply, general lossless compression techniques such as run-length encoding or various kinds of entropy encoding are common practice. The latter may take the form of Huffman encoding, which assigns variable-length binary strings to each distinct element in a data-set based on its relative frequency, or arithmetic encoding, which does not split up the data into pieces but compresses multiple elements at once.