Inconspicuous Echolocation in Hoary Bats (Lasiurus Cinereus)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Nine Species of Bats, Each Relying on Specific Summer and Winter Habitats
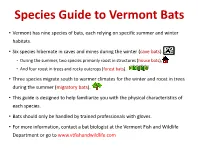
Species Guide to Vermont Bats • Vermont has nine species of bats, each relying on specific summer and winter habitats. • Six species hibernate in caves and mines during the winter (cave bats). • During the summer, two species primarily roost in structures (house bats), • And four roost in trees and rocky outcrops (forest bats). • Three species migrate south to warmer climates for the winter and roost in trees during the summer (migratory bats). • This guide is designed to help familiarize you with the physical characteristics of each species. • Bats should only be handled by trained professionals with gloves. • For more information, contact a bat biologist at the Vermont Fish and Wildlife Department or go to www.vtfishandwildlife.com Vermont’s Nine Species of Bats Cave Bats Migratory Tree Bats Eastern small-footed bat Silver-haired bat State Threatened Big brown bat Northern long-eared bat Indiana bat Federally Threatened State Endangered J Chenger Federally and State J Kiser Endangered J Kiser Hoary bat Little brown bat Tri-colored bat Eastern red bat State State Endangered Endangered Bat Anatomy Dr. J. Scott Altenbach http://jhupressblog.com House Bats Big brown bat Little brown bat These are the two bat species that are most commonly found in Vermont buildings. The little brown bat is state endangered, so care must be used to safely exclude unwanted bats from buildings. Follow the best management practices found at www.vtfishandwildlife.com/wildlife_bats.cfm House Bats Big brown bat, Eptesicus fuscus Big thick muzzle Weight 13-25 g Total Length (with Tail) 106 – 127 mm Long silky Wingspan 32 – 35 cm fur Forearm 45 – 48 mm Description • Long, glossy brown fur • Belly paler than back • Black wings • Big thick muzzle • Keeled calcar Similar Species Little brown bat is much Commonly found in houses smaller & lacks keeled calcar. -

Corynorhinus Townsendii): a Technical Conservation Assessment
Townsend’s Big-eared Bat (Corynorhinus townsendii): A Technical Conservation Assessment Prepared for the USDA Forest Service, Rocky Mountain Region, Species Conservation Project October 25, 2006 Jeffery C. Gruver1 and Douglas A. Keinath2 with life cycle model by Dave McDonald3 and Takeshi Ise3 1Department of Biological Sciences, University of Calgary, Calgary, Alberta, Canada 2Wyoming Natural Diversity Database, Old Biochemistry Bldg, University of Wyoming, Laramie, WY 82070 3Department of Zoology and Physiology, University of Wyoming, P.O. Box 3166, Laramie, WY 82071 Peer Review Administered by Society for Conservation Biology Gruver, J.C. and D.A. Keinath (2006, October 25). Townsend’s Big-eared Bat (Corynorhinus townsendii): a technical conservation assessment. [Online]. USDA Forest Service, Rocky Mountain Region. Available: http:// www.fs.fed.us/r2/projects/scp/assessments/townsendsbigearedbat.pdf [date of access]. ACKNOWLEDGMENTS The authors would like to acknowledge the modeling expertise of Dr. Dave McDonald and Takeshi Ise, who constructed the life-cycle analysis. Additional thanks are extended to the staff of the Wyoming Natural Diversity Database for technical assistance with GIS and general support. Finally, we extend sincere thanks to Gary Patton for his editorial guidance and patience. AUTHORS’ BIOGRAPHIES Jeff Gruver, formerly with the Wyoming Natural Diversity Database, is currently a Ph.D. candidate in the Biological Sciences program at the University of Calgary where he is investigating the physiological ecology of bats in northern arid climates. He has been involved in bat research for over 8 years in the Pacific Northwest, the Rocky Mountains, and the Badlands of southern Alberta. He earned a B.S. in Economics (1993) from Penn State University and an M.S. -
Index of Handbook of the Mammals of the World. Vol. 9. Bats
Index of Handbook of the Mammals of the World. Vol. 9. Bats A agnella, Kerivoula 901 Anchieta’s Bat 814 aquilus, Glischropus 763 Aba Leaf-nosed Bat 247 aladdin, Pipistrellus pipistrellus 771 Anchieta’s Broad-faced Fruit Bat 94 aquilus, Platyrrhinus 567 Aba Roundleaf Bat 247 alascensis, Myotis lucifugus 927 Anchieta’s Pipistrelle 814 Arabian Barbastelle 861 abae, Hipposideros 247 alaschanicus, Hypsugo 810 anchietae, Plerotes 94 Arabian Horseshoe Bat 296 abae, Rhinolophus fumigatus 290 Alashanian Pipistrelle 810 ancricola, Myotis 957 Arabian Mouse-tailed Bat 164, 170, 176 abbotti, Myotis hasseltii 970 alba, Ectophylla 466, 480, 569 Andaman Horseshoe Bat 314 Arabian Pipistrelle 810 abditum, Megaderma spasma 191 albatus, Myopterus daubentonii 663 Andaman Intermediate Horseshoe Arabian Trident Bat 229 Abo Bat 725, 832 Alberico’s Broad-nosed Bat 565 Bat 321 Arabian Trident Leaf-nosed Bat 229 Abo Butterfly Bat 725, 832 albericoi, Platyrrhinus 565 andamanensis, Rhinolophus 321 arabica, Asellia 229 abramus, Pipistrellus 777 albescens, Myotis 940 Andean Fruit Bat 547 arabicus, Hypsugo 810 abrasus, Cynomops 604, 640 albicollis, Megaerops 64 Andersen’s Bare-backed Fruit Bat 109 arabicus, Rousettus aegyptiacus 87 Abruzzi’s Wrinkle-lipped Bat 645 albipinnis, Taphozous longimanus 353 Andersen’s Flying Fox 158 arabium, Rhinopoma cystops 176 Abyssinian Horseshoe Bat 290 albiventer, Nyctimene 36, 118 Andersen’s Fruit-eating Bat 578 Arafura Large-footed Bat 969 Acerodon albiventris, Noctilio 405, 411 Andersen’s Leaf-nosed Bat 254 Arata Yellow-shouldered Bat 543 Sulawesi 134 albofuscus, Scotoecus 762 Andersen’s Little Fruit-eating Bat 578 Arata-Thomas Yellow-shouldered Talaud 134 alboguttata, Glauconycteris 833 Andersen’s Naked-backed Fruit Bat 109 Bat 543 Acerodon 134 albus, Diclidurus 339, 367 Andersen’s Roundleaf Bat 254 aratathomasi, Sturnira 543 Acerodon mackloti (see A. -

Chiropterology Division BC Arizona Trial Event 1 1. DESCRIPTION: Participants Will Be Assessed on Their Knowledge of Bats, With
Chiropterology Division BC Arizona Trial Event 1. DESCRIPTION: Participants will be assessed on their knowledge of bats, with an emphasis on North American Bats, South American Microbats, and African MegaBats. A TEAM OF UP TO: 2 APPROXIMATE TIME: 50 minutes 2. EVENT PARAMETERS: a. Each team may bring one 2” or smaller three-ring binder, as measured by the interior diameter of the rings, containing information in any form and from any source. Sheet protectors, lamination, tabs and labels are permitted in the binder. b. If the event features a rotation through a series of stations where the participants interact with samples, specimens or displays; no material may be removed from the binder throughout the event. c. In addition to the binder, each team may bring one unmodified and unannotated copy of either the National Bat List or an Official State Bat list which does not have to be secured in the binder. 3. THE COMPETITION: a. The competition may be run as timed stations and/or as timed slides/PowerPoint presentation. b. Specimens/Pictures will be lettered or numbered at each station. The event may include preserved specimens, skeletal material, and slides or pictures of specimens. c. Each team will be given an answer sheet on which they will record answers to each question. d. No more than 50% of the competition will require giving common or scientific names. e. Participants should be able to do a basic identification to the level indicated on the Official List. States may have a modified or regional list. See your state website. -

Overview Bat Species Around the World Face a Myriad of Threats, from Climate Change and Habitat Loss to Infectious Disease
Fact sheet for the 12th Meeting of the Conference of the Parties (CoP12) to the Convention on Migratory Species (CMS) Hoary bat Lasiurus cinereus Southern red bat Lasiurus blossevillii Eastern red bat Lasiurus borealis Southern yellow bat Lasiurus ega Proposed action: Inclusion on CMS Appendix II Proponents: Peru M. BROCK FENTON HOARY BAT / Overview Bat species around the world face a myriad of threats, from climate change and habitat loss to infectious disease. Recently, a new threat to migratory bat species has emerged: wind energy production. Although a critical source of renewable energy, research from the last decade has shown that, in just the United States and Canada, over half a million bats are killed each year by wind turbines. New research indicates that mortality at wind turbines has the potential to cause dramatic population-level declines in hoary bats, the species most frequently killed at wind turbines. Technological solutions are in development and operational changes at turbines can be immediately adopted, but most bat species killed by wind turbines do not have any formalized protection, so there is little incentive for wind energy facilities to adopt potentially costly measures that can drastically reduce bat fatalities. CMS Appendix II listing can catalyze protection for these species and encourage research into these migratory bat species and how best to protect them. Fact sheet for the 12th Meeting of the Conference of the Parties (CoP12) to the Convention on Migratory Species (CMS) Biology and Distribution yellow bats are also killed by wind turbines, but most of the records These four species of migratory bats predominantly roost in trees, are from a limited portion of their range. -

Washington, D.C. Bat Species List
Washington, D.C. Bat Species List Washington D.C.’s bats are divided into two main groups based on their roosting habits- “cave bats” and “tree bats.” “Cave bats” hibernate in caves during the winter and usually form colonies to roost and raise their pups during the summer. These colonies can be found in tree cavities, buildings, or other human-made structures. “Tree bats” tend to be solitary and roost under pieces of bark or in small groups. Tree bats often forage in the upper forest canopy and migrate long distances during the spring and fall. Washington, D.C.’s Cave Bats Big Brown Bat (Eptesicus fuscus) Big brown bats are ubiquitous throughout the United States and are found in both cities and rural environments. They usually form maternity colonies under loose bark and within small tree cavities. Other maternity roosts are commonly found in buildings and barns and under bridges. Big brown bats are a highly adaptable bat species that can relocate to human-made structures in response to increasing levels of habitat loss. They can also tolerate cooler (Photo Credit: Paul and Joyce Berquist) temperatures than other bat species, allowing them to roost in less insulated structures. Big brown bats are insectivorous and are specialized to prey upon beetles, but they will also consume other insects such as moths, ants, wasps, and flies. In Washington, D.C., big brown bats are one of the more likely species to form a colony inside of a home and are commonly observed foraging at dusk. Little Brown Bat (Myotis lucifugus) White-Nose Syndrome has decimated populations of little brown bats in Washington, D.C., and they are expected to become extirpated within the next few decades. -

Did Bats Become Ill? Redacted
Did bats Number Direct contact become Username Species cared for of species Longest duration kept URI? with bats? ill? redacted Mexican Fretailed, Yellow and Evening 3 5 years for individual bat Yes Yes No Lots, mostly Mexican free-tail, big brown, various myotis, pallid, silver-haired, red, redacted hoary, canyon 10 12 years for individual bat Yes Yes No N humeralis, L intermedius, T brasiliensis, M austroriparius, L seminolus, L cinereus, L redacted borealis 7 3 years for individual bat Yes Yes No big brown, little brown, red, hoary, tricolor, redacted silver haired, northern long eared, 7 1.5 years for individual bat Yes No No redacted Evening and Big Brown 2 6 years for individual bat Yes Yes No Big brown, little brown, eastern red, hoary, redacted silver-hair, tri-colored and evening bats 7 2 years for individual bat Yes Yes No British bats no horseshoes or leisler bats in redacted care to date 17 13 years for individual bat Yes Yes No Mexican free-tails, pocketed free-tails, big free-tails, mastiffs, evening bats, big browns, eastern and western pips, several species of myotis, red bats, yellow bats, hoary bats, Seminole bats, old-world and 25 years for a colony; 17 years redacted new-world fruit bats. 25 for individual bat Yes Yes No Big browns,red bats,silverhaired,hoary redacted bats,northern long eared and little browns. 6 3 years for individual bat Yes Yes No MFT's, reds, big browns, little browns, evening bats, Old World and New World fruit bats, pallid, big freetail, Mastiff, hoary, southeastern myotis, pipistrelle, northern 16 years for a colony; 9 years redacted and southern yellow, seminole. -

Patagonian Bats
Mammalia 2020; 84(2): 150–161 Analía Laura Giménez* and Mauro Ignacio Schiaffini Patagonian bats: new size limits, southernmost localities and updated distribution for Lasiurus villosissimus and Myotis dinellii (Chiroptera: Vespertilionidae) https://doi.org/10.1515/mammalia-2019-0024 (i.e. intra and interspecific interactions) and abiotic Received March 10, 2019; accepted June 7, 2019; previously published factors (i.e. temperature, altitude, precipitation and pro- online July 16, 2019 ductivity), together with dispersal ability capacities and the evolutionary history of each lineage (Gaston 2003, Cox Abstract: Vespertilionid species are widely distributed and Moore 2005, Soberón and Peterson 2005). As abiotic in South America. They are highly diverse, with physio- factors are not evenly distributed in space or time, they logical and behavioral adaptations which allow them to shape the borders of species’ distributions trough extreme extend their distributions into temperate areas. In Patago- values (e.g. minimum or maximum temperatures, dry or nia, this family is represented by seven species in three humid areas), which in turn influence resource availabil- genera (Histiotus, Lasiurus and Myotis). In this study, we ity and impose limits to reproduction and survival (Mackey analyzed the distribution of two vespertilionid species, and Lindenmayer 2001, Gaston 2003). In this way, those Lasiurus villosissimus and Myotis dinellii, including new areas with more favorable abiotic (and biotic) conditions southernmost records, and their relationship with envi- will show the highest relative abundance, while records ronmental variables. Two different spatial scales were will become more scarce and more far away from each analyzed: a continental approach for species distribu- other toward the borders of a species’ distribution (Brown tion analyses (South America), and local trapping of bats 2003 and references therein). -

Conservation Assessments for Five Forest Bat Species in the Eastern United States
United States Department of Agriculture Conservation Forest Service Assessments for Five General Technical Report NC-260 Technical Guide Forest Bat Species in the 2006 Eastern United States Front Cover: Illustrations by Fiona Reid, Ontario, Canada ©. Species from top: Pipistrellus subflavus, Myotis leibii, Myotis austroriparius, Myotis septentrionalis, Nycticeius humeralis. United States Department of Agriculture Conservation Forest Service Assessments for Five General Technical Report NC-260 Technical Guide Forest Bat Species in the 2006 Eastern United States Edited by Frank R. Thompson, III Thompson, Frank R., III, ed. 2006. Conservation assessments for five forest bat species in the Eastern United States. Gen. Tech. Rep. NC-260. St. Paul, MN: U.S. Department of Agriculture, Forest Service, North Central Research Station. 82 p. Assesses the status, distribution, conservation, and management considerations for five Regional Forester Sensitive Species of forest bats on national forests in the Eastern United States: eastern pipistrelle, evening bat, southeastern myotis, eastern small-footed myotis, and northern long-eared bat. Includes information on the taxonomy, description, life history, habitat distribution, status, and population biology of each species. KEY WORDS: conservation status, habitat use, life history, Myotis austroriparius (southeastern myotis), Myotis leibii (eastern small-footed myotis), Myotis septentrionalis (northern long-eared bat), Pipistrellus subflavus (eastern pipistrelle), Nycticeius humeralis (evening bat), Region 9, USDA Forest Service Disclaimer The U.S. Department of Agriculture (USDA) prohibits discrimination in all its programs and activities on the basis of race, color, national origin, age, disability, and where applicable, sex, marital status, familial status, parental status, religion, sexual orientation, genetic information, political beliefs, reprisal, or because all or part of an individual’s income is derived from any public assistance program. -

Idionycteris Phyllots Allen's Big-Eared
Allen's big-eared bat Idionycteris phyllots WAP 2012 species because of signifcant regional populaton declines as well as patchy distributon and low populaton numbers in Nevada. Agency Status NV Natural Heritage G4S1 USFWS No Status BLM-NV Sensitve State Prot Protected Mammal NAC 503.030.1 CCVI Presumed Stable TREND: Although trend is not well documented, there is much anecdotal informaton that this species is severely declining. In the Spring Mountains where they were previously captured and recorded, this species has not been recently observed. In other parts of their range outside the state, this species is declining and numbers of individuals are probably much less than previously thought. DISTRIBUTION: Restricted to Clark County although there is speculaton this species could occur in some areas of Nye and Lincoln countes. GENERAL HABITAT AND LIFE HISTORY: Inhabits mountainous areas and uses a variety of habitats including Mojave Desert scrub, coniferous forests, and riparian woodlands. Roosts in rocks, clifs, snags, and mines throughout its range but known roosts in Nevada consist only of snags and abandoned mines. Maternity colonies are generally found in mines. In the winter, they are thought to move from higher elevatons to lower elevatons but this is poorly understood. Food items include a variety of insects but diet predominantly consists of moths, probably gleaned from vegetaton or captured in fight. At least in some areas, this species demonstrates high roost fdelity with individuals fying 70-100 km roundtrip nightly between foraging grounds and the day roost (Brown and Berry 2004). Winter ecology is poorly understood, but they presumably hibernate in mines and caves and are capable of periodic winter actvity. -

Bats and Wind Turbines
March 2017 ISSUE BRIEF Bats and Wind Energy Background About Bats Of the 47 bat species that occur in Canada and the U.S., all but two are voracious consumers of insects, including many agricultural and forestry pests.1,2 Pest control services provided by bats reduce both the number of pests and the amount of pesticides required to con- trol them, and these services have been valued at more than $3.7 billion USD/year.3,4,5 The other two bat species, mostly prevalent in the Southwestern U.S., feed on the nectar of agave cactuses com- monly used to produce tequila and are critical pollinators for these plants.6,7 Bats face numerous threats, including climate change, habitat loss and degradation, persecution, White Nose Syndrome (WNS) and other diseases, and fatalities at wind energy facilities.8,9 Some of these threats, such as climate change and habitat loss and degrada- tion, affect all species, whereas others, such as WNS, affect species with certain ecological and behavioral characteristics (e.g., hibernat- ing in cold caves). Bats are long-lived and reproduce slowly, typically only having one to two pups a year and not every year, which limits their ability to sustain such threats and puts them at increased risk of population decline. MEXICAN FREE-TAILED BATS EXITING BRACKEN BAT CAVE, PHOTO BY USFWS HEADQUARTERS, FLICKR Bats and Wind Turbines Throughout the 1990’s, wind energy facilities did not report bat fa- ally been highest in the deciduous forests of the Northeast and low- talities for a variety of reasons: 1) no bat fatalities occurred at fa- est in the open range desert of the Great Basin/Southwest. -

Metabolic Physiology of Euthermic and Torpid Lesser Long-Eared Bats, Nyctophilus Geoffroyi (Chiroptera: Vespertilionidae)
Zurich Open Repository and Archive University of Zurich Main Library Strickhofstrasse 39 CH-8057 Zurich www.zora.uzh.ch Year: 1999 Metabolic physiology of euthermic and torpid lesser long-eared bats, nyctophilus geoffroyi (Chiroptera: Vespertilionidae) Hosken, D J ; Withers, P C Abstract: Thermal and metabolic physiology of the Australian lesser long-eared bat, Nyctophilias geo- jfroyi, a small (ca. 8 g) gleaning insectivore, was studied using flow-through respirometry. Basal metabolic rate of N. geojfroyi (1.42 ml O2 g−1 h−1) was 70% of that predicted for an 8-g mammal but fell within the range for vespertilionid bats. N. geoffroyi was thermally labile, like other vespertilionid bats from the temperate zone, with clear patterns of euthermy (body temperature >32°C) and torpor. It was torpid at temperatures 25°C, and spontaneously aroused from torpor at ambient temperatures 5°C. Torpor provided significant savings of energy and water, with substantially reduced rates of oxygen consumption and evaporative water loss. Minimum wet conductance (0.39 ml O2 g−1 h−1 °C−1) of euthermic bats was 108% of predicted, and euthermic dry conductance was 7.2 J g−1 h−1 °C−1 from 5-25°C. Minimum wet and dry conductances of bats that were torpid at an ambient temperature of 15-20°C (0.06 ml O2 g−1 h−1 °C−1 and 0.60 J g−1 h−1 °C−1) were substantially less than euthermic values, but conductance of some torpid bats increased at lower ambient temperatures and approached values for euthermic bats.