Application of High-Speed Imaging to Determine the Dynamics of Billiards ͒ ͒ ͒ S
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
8Ballscotdblsrules1.Pdf
8 BALL & SCOTCH DOUBLES GENERAL RULES & GUIDELINES TAP INTO THE GAME GENERAL RULES & GUIDELINES & RULES GENERAL 9 BALL& 10 BALL BALL 10 BALL& 9 www.tapleague.com A Message To All Members of TAP, LLC We at TAP, LLC, also referred to as TAP, would like to take this opportunity to welcome you to the new generation of league play. Our goal is to promote the sport of billiards in a forum that fosters fellowship, good sportsmanship and team spirit. Your affiliation with TAP is very important to us – important because it lets us know that you share the same love for the sport of billiards as we do. We hope that you enjoy your league play, and we are certain that you’ll witness your skills developing as you participate in the fastest growing team sport of the new millennium. TAP has put a good deal of effort into developing the programs offered to our members. Our research has noted that there are dozens of different ways to play the games of 8-Ball and 9-Ball, and these vary from establishment to establishment throughout the world. We’ve structured our rules to be as fair as we possibly can to all of our players, regardless of where they are competing. Please remember that there will be circumstances that arise that are not specifically covered in the rules. We ask you to use this booklet as a guide, and let your common sense and sportsmanship do the rest. Also remember that there are all levels of players and teams in TAP. -

Brunswick-Catalog.Pdf
THE BRUNSWICK BILLIARDS COLLECTION BRUNSWICKBILLIARDS.COM › 1-800-336-8764 BRUNSWICK A PREMIER FAMILY OF BRANDS It only takes one word to explain why all Brunswick brands are a cut above the rest, quality. We design and build high quality lifestyle products that improve and add to the quality of life of our customers. Our industry-leading products are found on the water, at fitness centers, and in homes in more than 130 countries around the globe. Brunswick Billiards is our cornerstone brand in this premier family of brands in the marine, fitness, and billiards industries. BRUNSWICK BILLIARDS WHERE FAMILY TIME AND QUALITY TIME MEET In 1845, John Moses Brunswick set out to build the world’s best billiards tables. Applying his formidable craftsmanship, a mind for innovation, boundless energy, and a passion for the game, he created a table and a company whose philosophy of quality and consistency would set the standard for billiard table excellence. Even more impressive, he figured how to bring families together. And keep them that way. That’s because Brunswick Billiards tables — the choice of presidents and sports heroes, celebrities, and captains of industry for over 170 years — have proven just as popular with moms and dads, children and teens, friends and family. Bring a Brunswick into your home and you have a universally-loved game that all ages will enjoy, and a natural place to gather, laugh, share, and enjoy each other’s company. When you buy a Brunswick, you’re getting more than an outstanding billiards table. You’re getting a chance to make strong and lasting connections, now and for generations to come. -

QBSA History
A History of Billiards and Snooker In particular of the QBSA Inc and its forerunners Sections 1 and 2 FROM BRITISH SETTLEMENT, THROUGH FEDERATION (1901), TO WORLD WAR 2 There was little interest in Billiards at all until the discovery of gold in Australia. Snooker had not yet been invented. After WW1 Snooker was rarely played and seen largely as an amusement. Few tables existed and only in the homes of the wealthy and the residences of the senior government officials, much as in the British Isles. The cost of tables was, of course, extremely prohibitive. The 150 pound purchase price represented approximately 75 weeks of average earnings for other than the wealthy and would represent a cost of some $60,000 in $2016 Au. (ABS Average weekly Income Ref 6302.0) With the gold rush (circa 1850’s) the game of Billiards arrived with some force over Australia, as well as the gambling derivatives such as the various forms of “pin” pool. These required a licence, as for public bagatelle tables. Bagatelle was a Billiard oriented, cloth covered table, of varying sizes (up to about 3 metres). These used small balls to be struck into holes guarded by pins and other obstacles. The holes had different values to compose a winning score for money. The owners and staff (“markers”) were deemed to be professionals. P This remained so until the 1960’s when our QBSA was the then Qld Amateur Billiards and Snooker Assn. and prior to, The Amateur Billiards Assn. or ABAQ, but more of that later. Settlement Timelines 1795 First Billiards match Sydney (Ayton.id.au) 1886 “The Referee” Sports Newspaper founded in Sydney 1886 “ Sydney Oxford Hotel Advertises new billiard room 1887 “ Burroughs and Watts, Table Maker, opens, Little George Street Sydney 1888 “ A Billiard Room advert for Billiards, pins and “pyramids” 1889 “ Alcock & Co (Est Vic1853) open an agency (Chas Dobson & Co), Sydney In those days Billiards in Australia was dominated by Harry Evans, professional, who held the Australian title for several years. -
Mike Sigel Once Again Won the Sands Regent Open Title and Its $10,000 Grand Prize
A STATISTICAL ANALYSIS OF 9-BALL POCKET BILLIARDS (201)838-7089 Vol. 2, No. 6 Photo by BILLIE BILLING RENO- "Captain Hook" Mike Sigel once again won the Sands Regent Open title and its $10,000 grand prize. In races to nine, Sigel outplayed David Rhodes (3), Ron Rosas (8), Jose Parica (7), Earl Strickland (4), Nick Varner (2), lost to David Howard 1-9, then defeated Allen Hopkins (7), and David Howard twice (7) and (6). ? ^ SANDS RECENT RENO, NEVADA December I-J, 1986 FINAL STANDINGS # NAME AVG. PRIZE # NAME AVG. 1st Mike Sigel (.902) $10,000 Dick Megiveron \ f.805) 2nd David Howard (.864) 6,000 Jay Swanson i1.796) 3rd Allen Hopkins (.888) 4,000 David Nottingham \f .795) 4th Ron Rosas (.861) 3,200 David Rhodes i[.788) 5th-6th Al Winchenbaugh l1.779) Nick Varner (.911) 2,200 Tom Karabotsos II.753) Jeff Carter (.853) 2,200 John Bryant 11.737) , 7th-8th Arturo Rivera 1'.733) Earl Strickland (.883) 1,750 Ted Ito 1'.698) Mike LeBron (.846) 1,750 Scott Chandler I' .642) 9th-12th 49th-64th Danny Medina (.893) 1,200 Mark Wilson |' .820) Kim Davenport (.883) 1,200 Louie Roberts 1' .798) Jose Parica (.876) 1,200 Tim Padgett 1' .779) Dave Bollman (.821) 1,200 Bill Incardona 1'.763) 13th-16th Darrell Nordquisti '.759) Greg Fix (.872) 800 Brian Hashimoto 1'.754) Warren Costanzo (.845) 800 Dan Kuykendall 1'.747) Mike Zuglan (.827) 800 Larry Nelson |' .741) 9^r Jr. Harris (.826) 800 JM Flowers 1' .740) 17th-24th Gary Hutchings 1 .730) Jimmy Reid (.866) 500 Rick White I .729) Howard Vickery (.847) 500 Jimmy Rogers 1 .715) Ernesto Dominguez(.818) 500 Harry -

Pool Lessons
EASY POOL TUTOR Online Resource for free pool and billiard lessons Pool Lessons STEP BY STEP 1 This page is intentionally left blank. 2 EASY POOL TUTOR Pool Lessons – Step by Step © Easypooltutor.com 2001-2004 3 This page is intentionally left blank. 4 TABLE OF CONTENTS INTRODUCTION ...................................................................... 12 I - FUNDAMENTALS OF POOL............................................. 13 Stance............................................................................................................................ 14 How to setup a Snooker stance ..................................................................................... 16 The Grip........................................................................................................................ 18 The Grip - Another perspective .................................................................................... 20 Getting a grip (right) is vital ......................................................................................... 21 The correct grip............................................................................................................. 23 The Bridge - Part I ........................................................................................................ 24 The Bridge - Part II (How to set up an open bridge) .................................................... 25 The Open Bridge........................................................................................................... 26 The Bridge -

Recommender System for the Billiard Game
http://lib.uliege.be https://matheo.uliege.be Recommender system for the billiard game Auteur : El Mekki, Sélim Promoteur(s) : Cornélusse, Bertrand Faculté : Faculté des Sciences appliquées Diplôme : Master en ingénieur civil électromécanicien, à finalité spécialisée en énergétique Année académique : 2018-2019 URI/URL : http://hdl.handle.net/2268.2/6725 Avertissement à l'attention des usagers : Tous les documents placés en accès ouvert sur le site le site MatheO sont protégés par le droit d'auteur. Conformément aux principes énoncés par la "Budapest Open Access Initiative"(BOAI, 2002), l'utilisateur du site peut lire, télécharger, copier, transmettre, imprimer, chercher ou faire un lien vers le texte intégral de ces documents, les disséquer pour les indexer, s'en servir de données pour un logiciel, ou s'en servir à toute autre fin légale (ou prévue par la réglementation relative au droit d'auteur). Toute utilisation du document à des fins commerciales est strictement interdite. Par ailleurs, l'utilisateur s'engage à respecter les droits moraux de l'auteur, principalement le droit à l'intégrité de l'oeuvre et le droit de paternité et ce dans toute utilisation que l'utilisateur entreprend. Ainsi, à titre d'exemple, lorsqu'il reproduira un document par extrait ou dans son intégralité, l'utilisateur citera de manière complète les sources telles que mentionnées ci-dessus. Toute utilisation non explicitement autorisée ci-avant (telle que par exemple, la modification du document ou son résumé) nécessite l'autorisation préalable et expresse des auteurs ou de leurs ayants droit. University of Li`ege- Faculty of Applied Science Academic year 2018-2019 Recommender system for the billiard game In fulfilment of the requirements for the Degree of Master in Electromechanical Engineering El Mekki S´elim Abstract This work studies how a recommender system for the billiard game can be treated as a reinforcement learning problem. -

Article from Bob Jewett
Bob Jewett Wrong Size, Wrong Shape You should probably have that looked at. Recently on the Internet discussion group It depends. The difference in size has a cor- feet, just from being that small amount rec.sport.billiard, Pat Johnson of Chicago responding difference in weight, and that lighter. mentioned a problem he had with his new will make the cue ball rebound off the object Now suppose the poolhall buys new object cue ball. When he put the cue ball on the ball differently. If you have only a vague balls, but keeps the old cue ball. That would table and surrounded it with six used object idea of where the cue ball is supposed to go roughly double the relative differences in balls from the poolhall, he couldn't get all on any particular shot, the difference will not diameters and weights, and for the example the balls to freeze. There would be gaps be noticed, but the better your position play draw shot I just described, the cue ball between the object balls, and if he moved the becomes, the more such discrepancies will would come back twice as far (four feet) as balls around so there was only one gap, it bother you. a standard cue ball against a standard object was 3/32nd of an inch, as shown in ball. If you instead try to follow with the Diagram 1. This seemed to show that the light cue ball, you will be similarly surprised pool balls were smaller than the cue ball. when the ball goes forward only 64 percent Pat's question was: How much smaller are as far as you were expecting. -
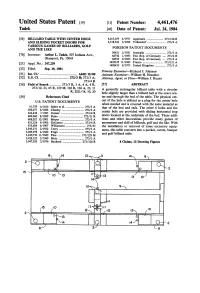
United States Patent (19) 11 Patent Number: 4,461,476 Tudek 45 Date of Patent: Jul
United States Patent (19) 11 Patent Number: 4,461,476 Tudek 45 Date of Patent: Jul. 24, 1984 54 BLLARD TABLE WITH CENTER HOLE 4,017,079 4/1977 Appelaniz ....................... 273/126R AND SILONG POCKETDOORS FOR 4,318,543 3/1982 Vollendorf......................... 273/4. A VARIOUS GAMES OF BILLIARDS, GOLF FOREIGN PATENT DOCUMENTS AND THE LIKE . 50431 2/1931 Australia ............................ 273/3 A 76 Inventor: Arthur L. Tudek, 507 Indiana Ave., 66742 1/1893 Fed. Rep. of Germany ..... 273/4. R Glassport, Pa. 15045 66932 2/1893 Fed. Rep. of Germany ..... 273/4. A 1422335 11/1965 France ............................ 273/121 A (21) Appl. No.: 247,239 1402433 8/1975 United Kingdom ............... 273/3 A 22) Filed: Sep. 18, 1981 Primary Examiner-Richard J. Johnson 51 Int. C. ............................................. A63D 15/00 Assistant Examiner-William H. Honaker 52) U.S. C. ................................... 273/3 R; 273/3 A; Attorney, Agent, or Firm-William J. Ruano 273/4 R (58) Field of Search .............. 273/3 R, 3 A, 4 A, 4 R, 57 ABSTRACT 273/12, 23, 85 R, 129 M, 126 R, 126 A, 23, 11 A generally rectangular billiard table with a circular R; D21/14, 10, 20 hole slightly larger than a billiard ball at the exact cen 56 References Cited ter and through the bed of the table. The physical cut U.S. PATENT DOCUMENTS out of the hole is utilized as a plug for the center hole when needed and is covered with the same material as 81,759 8/1830 Salter et al. ........................ 273/3 A that of the bed and rails. -

Guide to the Albany Billiard Ball Company Records
Guide to the Albany Billiard Ball Company Records NMAH.AC.0011 William R. Massa, Jr. and Robert S. Harding 1979 November Archives Center, National Museum of American History P.O. Box 37012 Suite 1100, MRC 601 Washington, D.C. 20013-7012 [email protected] http://americanhistory.si.edu/archives Table of Contents Collection Overview ........................................................................................................ 1 Administrative Information .............................................................................................. 1 Scope and Contents........................................................................................................ 2 Biographical / Historical.................................................................................................... 2 Names and Subjects ...................................................................................................... 2 Container Listing ............................................................................................................. 4 Series 1: Administrative Records, 1912-1972.......................................................... 4 Series 2: Bound Volumes, 1875-1911..................................................................... 6 Series 3: Correspondence, 1882 - 1973.................................................................. 9 Series 4: Legal Documents, 1873 - 1974.............................................................. 10 Series 5: Patents and Trademarks, 1870 - 1973.................................................. -
Modern Pool, Technique, Pool Attention & Focus Training, Etc
www.billiardbook.com Over 300 illustrations and more than 40 photographs guide you step by step along the way of learning the game(s) of pool billiards. No previous knowledge or abilities are assumed, but you will still be led toward your individually attainable level of performance. And this, if neces- sary, up to the most intricate subtleties of this wonderful game. Pool billiards is more than just a brilliant coordination of mental and physical adroitness. Hardly any sport can deliver more enjoyment of one’s achievements and abilities as this one. About the Author: "Even before I became a professional, Ralph taught Ralph Eckert (born 03/28/1965) is the first certified me many things that has had „International European Instructor". A columnist a tremendous impact on my of high acclaim for various billard magazines, his career. When I became a books have set the highest standards in Europe. professional his teachings More than just an instructor, Ralph Eckert is became even more insightful. undoubtedly considered a top European player. I can't help but pass on his His first excursions in the late 80's and early 90's knowledge to my students to some Professional Tour tournaments were well and share with my friends on rewarded with finishes in the money ranks. the Pro Tour. In professional Ralph Eckert started tournaments against the playing billiards in worlds best players, I still use 1982, joined the na- the principles Ralph taught tional team in 1988 me." and appeared in Thorsten Hohmann many renowned in- World Champion 2003 ternational tourna- ments, such as the Professional 9-Ball World Champi- onships in Cardiff 1999, 2000, 2001 and 2003. -

Mechanics of Billiards, and Analysis of Willie Hoppe's Stroke
MECHANICS OF BILLIARDS, AND ANALYSIS OF WILLIE HOPPE'S STROKE A. D. MOORE Professor of Electrical Engineering College of Engineering University of Michigan Ann Arbor, Michigan January 17, 1942 January 6, 1947: Additional Notes. Since writing the manuscript five years ago, some additional facts have come to light, and should be mentioned here. At the bottom of the page, page 26, it is concluded that the cue ball initial velocity, in the nine-cushion shot, is no more than in the break shot. This is wrong. Hoppe and Cochran both say that the nine-cushion shot takes a much harder stroke. Al¬ though I have never managed to make this shot, my attempts at it force me to agree. I went wrong in my analysis by assuming that the flash interval in the Life photographs was the same for all shots. As it turns out, the apparatus (which I have learned was built at Bell Lab¬ oratories by a former student of mine!) was adjustable: for any one shot, the best flash interval for recording that shot could be used. On page 39, I stated certain conclusions about the bridge, and tightness of the bridge. Since studying neuromuscular phenomena, and after recording my own stroke and analyzing it, I conclude that the most important function of the professional's tight bridge is to furnish a constant resistance to cue movement. This, in turn, requires him to shoot tetanically. That is, the stroking muscles are in a constant state of contraction while accelerating the cue. My theory is that only in this was can one master the "velocity" part of the game, and reliably impart to the cue ball the desired velocity, in order to play position. -
Louis Vuitton & Aramith Collaborate to Create Pool Balls
GROUP PRESS RELEASE SIMONIS® – ARAMITH® – STRACHAN® Louis Vuitton & Aramith Collaborate to Create Pool Balls The world’s finest billiard ball manufacturer, Aramith, is working with Louis Vuitton as they introduce exclusive pool balls to Louis Vuitton’s stunning new limited‐edition Billiard Trunk. Aramith, who manufactures the world’s finest quality professional billiard balls, is proud to announce a collaboration with Louis Vuitton. The Belgian expert ball manufacturer has designed a limited‐edition customized Louis Vuitton pool ball set for the House’s new Billiard Trunk which will be launched in May 2018. Saluc / Aramith COO, Yves Bilquin, said: “We are delighted to be working with Louis Vuitton to produce this exclusive, high‐end product for the connoisseurs. Louis Vuitton represents the absolute pinnacle of sophistication, innovation and quality. Aramith, the world’s most prestigious billiard ball manufacturer, is the only brand able to produce billiard balls with a level of quality required by Louis Vuitton and its new limited‐ edition Billiard Trunk”. Bilquin adds: “Many of the most stylish luxury homes are now designed with beautiful game or billiards rooms and the luxury market is growing. The very top end of the market demands absolute quality and the new Louis Vuitton Billiard Trunk with Aramith professional balls is the ultimate addition to any luxury game room”. The Aramith billiard balls have been especially customised for this collaboration, using state of the art engraving techniques. Louis Vuitton’s signature Monogram flower motif can be found on the fifteen numbered balls, while the cue ball features a discreet LV logo inscription.