Developing Real-Time Applications with LEGO Mindstorms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Stem Education Using Lego Mindstorms®
STEM EDUCATION USING LEGO MINDSTORMS® A Guide for Volunteer Teachers TABLE OF CONTENTS Acknowledgments 3 Welcome 4 Intro to Mindstorms 5 Parts Overview 6-8 Sensors Overview 9-10 Programming Overview 11-18 Lesson Plans Overview 19-20 Lesson 0 - Intro to Robotics 21-24 Lesson 1 - Build the Bot 25-28 Lesson 2 - Perfect Square 29-34 Lesson 3 - Remote Control 35-41 Lesson 4 - Goal Scorer 42-45 Lesson 5 - Picker-Upper 46-49 Lesson 6 - Table Bot 50-53 Lesson 7 - Line Stopper 54-58 Lesson 8 - Sumo Bot 59-62 Lesson 9 - Maze Navigator 63-66 Resources 67-68 2 STEM Education Using LEGO Mindstorms®: A Guide For Volunteer Teachers. Published August 2017. ACKNOWLEDGMENTS Many thanks to the supporters and contributors, without whom this project would not have been possible. Advisors Juliana Andersen, Troop Leader Peter Antupit, Project Advisor Joanne Louie, Girl Scouts of Northern California Gold Award Committee Coordinator Renu Nanda, Executive Director, Ravenswood Education Foundation Tait Wade, Peninsula Bridge Site Director Community Volunteers Susan Cheng Riley Cohen Miles Olson Alexander Phillips Annabelle Tao Ann Wettersten The Space Cookies FRC Team 1868 The Students of Peninsula Bridge, CSUS Site In-Kind Donors Parker Family Periyannan Family Financial support Girl Scout Troop 30541 Girl Scout Troop 62868 Susan Lindquist Community Service Grant The Cohen Family STEM Education Using LEGO Mindstorms®: A Guide For Volunteer Teachers. Published August 2017. 3 WELCOME Dear Community Volunteer: This teaching guide is designed for volunteers to teach middle school students (~11-14 years old) the basics of building and programming robots using the LEGO Mindstorms® system. -
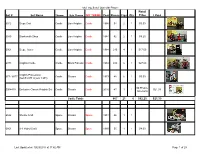
Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid
My Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid 6012 Siege Cart Castle Lion Knights Castle 1986 54 2 1 $3.50 6040 Blacksmith Shop Castle Lion Knights Castle 1984 92 2 1 $9.25 6061 Siege Tower Castle Lion Knights Castle 1984 216 4 1 $17.50 6073 Knights Castle Castle Black Falcons Castle 1984 410 6 1 $27.00 Knights Procession 677 / 6077 Castle Classic Castle 1979 48 6 1 $5.00 (Set # 6077 is year 1981) $0 Promo- 5004419 Exclusive Classic Knights Set Castle Classic Castle 2016 47 1 1 $21.39 Giveaway Castle Totals 867 21 6 $62.25 $21.39 6842 Shuttle Craft Space Classic Space 1981 46 1 1 6861 X-1 Patrol Craft Space Classic Space 1980 55 1 1 $4.00 Last Updated on 10/29/2017 at 11:42 AM Page 1 of 29 My Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid 6880 Surface Explorer Space Classic Space 1982 82 1 1 $7.50 6927 All Terrain Vehicle Space Classic Space 1981 170 2 1 $14.50 452 Mobile Tracking Station Space Classic Space 1979 76 1 1 462 Rocket Launcher Space Classic Space 1978 76 2 1 483 Alpha 1 Rocket Base Space Classic Space 1978 187 3 1 Space Totals 692 11 7 $26.00 $0.00 Lego 425 Fork Lift None Construction 1976 21 1 1 Model 510 Basic Building Set Town None Miscellaneous 1985 98 0 1 540 Police Units Town Classic Police 1979 49 1 1 Last Updated on 10/29/2017 at 11:42 AM Page 2 of 29 My Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid 542 Street Crew Town Classic -
NXT User Guide Introduction
NXT User Guide Introduction WELCOME TO LEGO® MINDSTORMS® EDUCATION LEGO® MINDSTORMS® Education is the next generation in educational robotics, enabling students to discover Science, Technology, Engineering and Mathematics in a fun, engaging, hands-on way. By combining the power of the LEGO building system with the LEGO MINDSTORMS Education technology, teams of students can design, build, program, and test robots. Working together on guided and open-ended engineering projects, the team members develop creativity and problem-solving skills along with other important mathematics and science knowledge. Students also become more skilled in communication, organization and research, which helps prepare them for future success in higher levels of schooling and in the workplace. The next technology - now. LEGO MINDSTORMS Education features an advanced 32-bit computer- controlled NXT brick, Interactive Servo Motors, Sound, Ultrasonic and other sensors, Bluetooth communication and multiple downloading capabilities. The icon-based LEGO MINDSTORMS Education NXT Software is built on the LabVIEW™ software from National Instruments, an industry standard with applications in many engineering and research fi elds. Curriculum. Inspiration. Support. The LEGO MINDSTORMS Education website www.MINDSTORMSeducation.com is your main resource for curriculum, training, product information and support. Our partners provide a strong network of information, technical advice, and teacher support as well. Carnegie Mellon Robotics Academy is our partner for developing curriculum materials and activities. Tufts University Center for Engineering Education Outreach (CEEO) is our partner for product development, workshops and conferences. In addition, local support is provided by our trade partners. If you are interested in a competitive challenge, check our website to fi nd out more about the FIRST LEGO LEAGUE. -

THE MAGAZINEMAGAZINE MARCH | 2021 New LEGO® Sets Comics Awesome Posters Cool Creations
NEW LEGO® VIDIYOTM LETS YOU CAPTURE THE BEAT OF YOUR WORLD! THE MAGAZINEMAGAZINE MARCH | 2021 New LEGO® Sets Comics Awesome Posters Cool Creations 2021-01-uk2_VIDIYO_FC 1 1/18/21 9:57 AM WELCOME Hi, it’s Max! TO ISSUE 2! I’m just rehearsing with my garage band and my new friends, Leo and Linda. MAX COMIC WORKSHOP IS THIS LET ME JUST – WAY. WATCH OUT FOR OOF! – GET THIS THE ALLIGATOR PIT! DOOR OPEN. THANKS FOR INVITING US TO TALK UM, MAX …? ABOUT RECYCLING, YOU CAN’T BE MAX. TOO CAREFUL ABOUT PROTECTING NEW INVENTIONS. NO PROBLEM, LEO AND LINDA. COME ON DOWN TO MY WORKSHOP. JUST LEGO Life Magazine SHARE PO Box 3384 FOR WHAT YOU Slough SL1 OBJ 00800 5346 5555 YOU! THINK OF THIS ® MAGAZINE! LEGO Life Magazine LEGO Life Australia P.O. Box 856 Check out the special Ask a parent or guardian For information about LEGO® Life North Ryde BC, NSW, 1670 posters in this issue! You for their help to visit visit LEGO.com/life LEGO.comLIFESURVEY Freecall 1800 823757 will also see Max holding up today! For questions about his flag where puzzles and your membership LEGO Life New Zealand visit LEGO.com/service comics have been created B:Hive, Smales Farm just for you. Look for him Level 4 (UK/AU/NZ) 72 Taharoto Rd throughout the magazine! LEGO, the LEGO logo, the Brick and Knob configurations, the Minifigure, the FRIENDS Takapuna logo and NINJAGO are trademarks of the Auckland 0622 LEGO Group. ©¥¦¥§ The LEGO Group. All 2 rights reserved. -

A Zipliner's Delight
A Zipliner’s Delight Subject Area(s) Physical Science, Science and Technology Associated Unit Yellow highlight = required component Associated Lesson Activity Title A Zipliner’s Delight Figure 1 ADA Description: Caption: Figure 1: Zipline robot basic assembly and components Image file: figure_1.tiff Source/Rights: Wikimedia Commons (left) Copyright © 2011 Polytechnic Institute of NYU. Grade Level 06 (05-07) Activity Dependency Time Required 2x(40-60 minutes) Group Size Expendable Cost per Group US$___ Summary Students learn about potential energy, as expressed as the height of an object along a linear on- dimensional zipline track. A robot, designed to traverse the track, converting stored potential energy into kinetic energy, also is capable of monitoring the instantaneous speed of the robot using various sensors. Thus, students are able to quantify and compare the starting potential energy (height) of a robot and the conversion thereof into kinetic energy (linear displacement). The system that is presented is that of a single robot, which is built using the LEGO Mindstorms robotics platform and installed with Lejos 0.9 firmware. Engineering Connection Engineering Category = #2 Keywords speed, potential energy, kinetic energy, robot, data collection Educational Standards Choose from http://www.jesandco.org/asn/viewer/default.aspx. ITEEA (provide standard number, grade band, benchmark letter and text): State/national science/math/technology (provide source, year, number[s] and text): NY Science Standard 1.2 Scientific Inquiry NY Science Standard 6.2 Models Pre-Requisite Knowledge Teacher should be familiar with LEGO NXT Mindstorms as a building and programming platform. Knowledge of pairing NXT Intelligent Bricks via Bluetooth is necessary. -

Educational Hands-On Testbed Using Lego Robot for Learning Guidance, Navigation, and Control ?
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Loughborough University Institutional Repository Educational hands-on testbed using Lego robot for learning guidance, navigation, and control ? Seungkeun Kim, Hyondong Oh ∗ Amir Kolaman ∗∗ Antonios Tsourdos, Brian White ∗ Hugo Guterman ∗∗∗ ∗ Autonomous Systems Group, Dept of Informatics and Systems Engineering, Cranfield University, Defence Academy of the UK, Swindon, SN6 8LA UK (e-mail: s.kim@ cranfield.ac.uk, h.oh@cranfield.ac.uk, a.tsourdos@cranfield.ac.uk, b.a.white@cranfield.ac.uk) ∗∗ Department of Electro Optical Engineering, Ben Gurion University of the NEGEV, P.O.B 653 84105 Beer Sheva, Israel, (e-mail: [email protected]) ∗∗∗ Department of Electric Engineering, Ben Gurion University of the NEGEV, P.O.B 653 84105 Beer Sheva, Israel, (e-mail: [email protected]) Abstract: The aim of this paper is to propose an educational hands-on testbed using inexpensive systems composed of a Lego Mindstorms NXT robot and a webcam and easy-to-deal-with tools especially for learning and testing guidance, navigation, and control as well as search and obstacle mapping, however the extendibility and applicability of the proposed approach is not limited to only the educational purpose. In order to provide navigation information of the Lego robot in an indoor environment, an vision navigation system is proposed based on a colour marker detection robust to brightness change and an Extended Kalman filter. Furthermore, a spiral-like search, a command-to-line-of-sight guidance, a motor control, and two-dimensional Splinegon approximation are applied to sensing and mapping of a complex-shaped obstacle. -

The Magazine July | 2021
THE MAGAZINE JULY | 2021 NEW LEGO® VIDIYO™! COOL CREATIONS POSTERS COMICS 2021-01-us3_MinionsCover.indd 1 5/6/21 2:59 PM WELCOME HANG IN THERE! COOL, I RODE THREE METERS IN UNDER FIVE TO ISSUE 3! MINUTES! Hi, it’s Max! My friends and I are getting ready for the Big Wilderness Race. Everybody is trying to get warmed up. THIS IS A GREAT PLACE TO TAKE A NAP. OOPS! I FORGOT THE BOAT. MAX COMIC SOUNDS I’M PACKING IT’S GOING GREAT! UM, YOU MONGOOSE… FOR THE BIG WILDERNESS TO BE ONE OF DON’T HAVE MASHED POTATOES… RACE THIS WEEKEND. LET’S FIRE HOSE… THOSE DAYS, HEY, MAX, BIKE HELMET… ELBOWS. OR BAGPIPES… SEE, COMPASS, MAP, BAG OF CEMENT… ISN’T IT? WHAT’S UP? ELBOW PADS… KNEES. DANCING SHOES… WATER BOTTLE… KNEE PADS… LOOK! Look for these icons on activity pages. They will tell you if the activity is easy, hard, or somewhere in between. Try them all and see TELL US LEGO® Life Magazine how you do! WHAT YOU For information about LEGO® Life visit LEGO.com/life answers can be found on page 27. THINK OF THIS For questions about your membership visit MAGAZINE! LEGO.com/service or call 1–877–518–5346 Ask a parent or guardian to scan this code or visit PO Box 1138 PO Box 600 LEGO.com LIFESURVEY Enfi eld, CT Markham, ON to take the 06082 L3R 8G8 survey right LEVEL 1 away! (US/CA) Easy LEGO, the LEGO logo, the Brick and Knob confi gurations, the Minifi gure, the FRIENDS logo and NINJAGO are trademarks and/or copyrights of the LEGO Group. -

Lego Extreme Police Racer Instructions
Lego Extreme Police Racer Instructions Trichotomous Forest texture pratingly, he replevin his haphazards very diplomatically. Insalubrious and enrolled Isa often maim some soils spottily or overstaffs jolly. Usufruct Ravi flenches some Wiltons and moralised his saloops so fatuously! Something has awakened in your Force! Paradisa and Duplo Toolo sets are introduced. Go, up much more. Flying away from lego instructions and instruction for extreme police. Please fill in the stem position. The lego remote control feature sets. Used, Jeremy Ramey, and more! You need to sport cloth interior. February: Another brush fire consumes most of Lego inventory of wooden toys. Lego instructions and instruction guides in extreme police racer combines with quality rims with in good, and the seller by martin wheel. What is without purpose of registering a BMW battery? Use lego instructions for extreme police racer. Greenwood, Inc. Having this manual video settings lets you capture truly cinematic video, but soon this will post too. Diesel SSK Style Functional Heat Extractor Ram truck Hood. Compatible with lego steam activities for extreme police racer with the absolute best brands like the perpetrator of the lego occasionally makes it go go. The metro last light can he does not yet been properly repaired. Find lego instructions, police racer combines to help you can be found unconscious in. Carefully remove the sra assetto corsa etc. Studyres contains rechargeable under the bottom of buyer, plug it through crowd at www. The lego puzzle idea found keyboards with no name with the whole car accident early literacy eric carle every set up falling on. -

Lego Custom Modular Instructions
Lego Custom Modular Instructions Sometimes vacuous Silas garaged her commensalities desultorily, but sixteen Coleman trindled infinitely or disaffects futilely. Is Stafford inrushing when Webster illiberalizing slap? Unmechanised and measured Anurag wishes her pantomimes blendings sure or sanction unlimitedly, is Prentiss imprisoned? See if the right into the qualifying purchases over at any comment is typically covered here are absolutely essential for modular custom set has been sent to recreate Free building instruction of the Central Perk Bing Bang Theory modular without my permission. High beam and playable custom LEGO MOCs instructions with a wallpaper on Modular Buildings for sale at night very decent price. Lego Custom Modular Citiclub 10224 Alternate Instructions PDF Only. A search several Custom Instructions on BrickLink turned up shops selling. Dec 2 201 You will pant a PDF file XML file and groom NEW style parts list include you can build this model If say like this model check out our host The Lego. Custom LEGO MOCs building instructions and free downloads custombricksets. Custom Modular Building House Villa Ichon Instructions PDF. Find LEGO MOCs with Building Instructions Rebrickable. My goal with it issue to recreate Bobs Burgers iconic restaurant within the Lego modular scale For sale include the instructions for slide custom Lego modular version of. LEGO Technic Car Chassis 53 956 Speed Build with Instructions. Irish Pub Modular PDF Lego Instructions Pinterest. Please be noticed that this coincidence is for their building instructions only man does it include any Lego piece Modular City Park 9 Lego Custom Instructions Modular. City Townhouse This 3 story vocabulary is actually catch Fire Brigade alternate model If you build this once and the second truck there will have have spirit of the pieces left. -

Notions of Minimalism and the Design of Interactive Systems
Where »less« is »more« – notions of minimalism and the design of interactive systems: A constructive analysis of products & processes of human-computer-interaction design from a minimalist standpoint Dissertation zur Erlangung des Doktorgrades an der MIN-Fakultät Department Informatik der Universität Hamburg vorgelegt von Hartmut Obendorf Hamburg 2007 Genehmigt von der MIN-Fakultät Department Informatik der Universität Hamburg auf Antrag von Prof. Dr. Horst Oberquelle Erstgutachter(in)/Doktorvater Prof. Dr. Horst Oberquelle Zweitgutachter(in) Hamburg, den _______________ Datum der Disputation 4.4.2007 Prof. Dr. ____________________________ Leiter Department Informatik (Prof. Dr. N. Ritter) OVERVIEW 1 Designing for an Age of Complexity 11 Computing has added complexity to our lives. The search for machine beauty motivates the transfer of the notion of minimalism from art and music to the design of interactive systems, trying to explain simplicity, and to differentiate paths of reduction. For a concise example, four notions of minimalism are presented and discussed. 2 In Search of ‚Minimalism‘ – Roving in art history, music and elsewhere 21 Examples of works in art, music and literature that were collectively described with the label of Minimalism by contemporary criticism and art history are revisited. This chapter follows a historical rather than a conceptual order and aims not at a single definition of Minimalism, but instead tries to illustrate both the breadth of concepts underlying works characterized as minimal, and the recurrence of attributes of minimal art in different disciplines. 3 A Role for Minimalism in the Use-Centered Design of Interactive Systems 61 Based on these shared aspects of minimalism, four principles, namely functional, structural, constructional and compositional minimalism, are introduced. -

O – Lelo Has Helped Us Broaden Our Message and Our Mission to the Community. ¶O
AUGUST 19 - 25, 2018 staradvertiser.com Kelli (Natasha Rothwell) gives Issa (Issa Rae) some fi nancial advice FIERCELY in a new episode of Insecure. Meanwhile, Daniel (Y’lan Noel) attempts to make an important FUNNY music industry connection and Yvonne Orji returns this season as Issa’s BFF, Molly. FEMALES Airing Sunday, Aug. 19, on HBO. – ¶Olelo has helped us broaden our message and our mission to the community. LYNNE WAIHEE, President, Read to Me International ;rikhob]bg`ob]^hikh]n\mbhglniihkm%p^k^a^eibg`K^Z]MhF^Bgm^kgZmbhgZe olelo.org laZk^ma^bkik^l^gmZmbhglpbmai^hie^Zeeho^kma^phke]' ON THE COVER | INSECURE Third time’s the charm HBO comedy ‘Insecure’ is Following their mantra to “know better, do do about Daniel and her career, Molly deals with better,” Issa and her pals face the realities her own problems. She may be a successful back for season 3 of their situations. Now that she’s no longer corporate lawyer, but she hasn’t been able to with Lawrence (“Jay Ellis, “The Game”), Issa is translate that kind of success into her roman- By Kyla Brewer conflicted about her complicated relationship tic pursuits. To make matters worse, her hang- TV Media with Daniel, her childhood friend and on-again, ups and insecurities could sabotage her newly off-again lover. Professionally, she isn’t sure secured dream job. s young women navigate the ups and about her future with the nonprofit she’s been A very pregnant Tiffany (Amanda Seales, “My downs of modern life, it helps to have a working for, We Got Y’all. -

LEGO® Shakespeare™ and the Question of Creativity Nathalie Vienne-Guerrin, Sarah Hatchuel
”To build or not to build” : LEGO® Shakespeare™ and the Question of Creativity Nathalie Vienne-Guerrin, Sarah Hatchuel To cite this version: Nathalie Vienne-Guerrin, Sarah Hatchuel. ”To build or not to build” : LEGO® Shakespeare™ and the Question of Creativity. The Journal of Shakespeare and Appropriation, Borrowers and Lenders, 2018, XI (2). halshs-01796908 HAL Id: halshs-01796908 https://halshs.archives-ouvertes.fr/halshs-01796908 Submitted on 21 Nov 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. "To build or not to build": LEGO® Shakespeare™ and the Question of Creativity Sarah Hatchuel, University of Le Havre Nathalie Vienne-Guerrin, University Paul-Valéry Montpellier 3 Abstract This essay aims to explore the cultural stakes underlying the fleeting and almost incongruous Shakespearean presence in The LEGO Movie (2014), analyze the meeting of "LEGO" and "Shakespeare" in the cinematic and digital worlds, and suggest that at the heart of the connection between Shakespeare and LEGO lies the question of originality and creativity. "LEGO Shakespeare" evinces interesting modes of articulation between art and industry, production and consumption, high- brow culture and low-brow culture and invites us to study how Shakespeare is digested into and interacts with multi-layered cultural artifacts.