Hardware Developments V E-CAM Deliverable 7.9 Deliverable Type: Report Delivered in July, 2020
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

GPU Developments 2018
GPU Developments 2018 2018 GPU Developments 2018 © Copyright Jon Peddie Research 2019. All rights reserved. Reproduction in whole or in part is prohibited without written permission from Jon Peddie Research. This report is the property of Jon Peddie Research (JPR) and made available to a restricted number of clients only upon these terms and conditions. Agreement not to copy or disclose. This report and all future reports or other materials provided by JPR pursuant to this subscription (collectively, “Reports”) are protected by: (i) federal copyright, pursuant to the Copyright Act of 1976; and (ii) the nondisclosure provisions set forth immediately following. License, exclusive use, and agreement not to disclose. Reports are the trade secret property exclusively of JPR and are made available to a restricted number of clients, for their exclusive use and only upon the following terms and conditions. JPR grants site-wide license to read and utilize the information in the Reports, exclusively to the initial subscriber to the Reports, its subsidiaries, divisions, and employees (collectively, “Subscriber”). The Reports shall, at all times, be treated by Subscriber as proprietary and confidential documents, for internal use only. Subscriber agrees that it will not reproduce for or share any of the material in the Reports (“Material”) with any entity or individual other than Subscriber (“Shared Third Party”) (collectively, “Share” or “Sharing”), without the advance written permission of JPR. Subscriber shall be liable for any breach of this agreement and shall be subject to cancellation of its subscription to Reports. Without limiting this liability, Subscriber shall be liable for any damages suffered by JPR as a result of any Sharing of any Material, without advance written permission of JPR. -

Future-ALCF-Systems-Parker.Pdf
Future ALCF Systems Argonne Leadership Computing Facility 2021 Computational Performance Workshop, May 4-6 Scott Parker www.anl.gov Aurora Aurora: A High-level View q Intel-HPE machine arriving at Argonne in 2022 q Sustained Performance ≥ 1Exaflops DP q Compute Nodes q 2 Intel Xeons (Sapphire Rapids) q 6 Intel Xe GPUs (Ponte Vecchio [PVC]) q Node Performance > 130 TFlops q System q HPE Cray XE Platform q Greater than 10 PB of total memory q HPE Slingshot network q Fliesystem q Distributed Asynchronous Object Store (DAOS) q ≥ 230 PB of storage capacity; ≥ 25 TB/s q Lustre q 150PB of storage capacity; ~1 TB/s 3 The Evolution of Intel GPUs 4 The Evolution of Intel GPUs 5 XE Execution Unit qThe EU executes instructions q Register file q Multiple issue ports q Vector pipelines q Float Point q Integer q Extended Math q FP 64 (optional) q Matrix Extension (XMX) (optional) q Thread control q Branch q Send (memory) 6 XE Subslice qA sub-slice contains: q 16 EUs q Thread dispatch q Instruction cache q L1, texture cache, and shared local memory q Load/Store q Fixed Function (optional) q 3D Sampler q Media Sampler q Ray Tracing 7 XE 3D/Compute Slice qA slice contains q Variable number of subslices q 3D Fixed Function (optional) q Geometry q Raster 8 High Level Xe Architecture qXe GPU is composed of q 3D/Compute Slice q Media Slice q Memory Fabric / Cache 9 Aurora Compute Node • 6 Xe Architecture based GPUs PVC PVC (Ponte Vecchio) • All to all connection PVC PVC • Low latency and high bandwidth PVC PVC • 2 Intel Xeon (Sapphire Rapids) processors Slingshot -
Marc and Mentat Release Guide
Marc and Mentat Release Guide Marc® and Mentat® 2020 Release Guide Corporate Europe, Middle East, Africa MSC Software Corporation MSC Software GmbH 4675 MacArthur Court, Suite 900 Am Moosfeld 13 Newport Beach, CA 92660 81829 Munich, Germany Telephone: (714) 540-8900 Telephone: (49) 89 431 98 70 Toll Free Number: 1 855 672 7638 Email: [email protected] Email: [email protected] Japan Asia-Pacific MSC Software Japan Ltd. MSC Software (S) Pte. Ltd. Shinjuku First West 8F 100 Beach Road 23-7 Nishi Shinjuku #16-05 Shaw Tower 1-Chome, Shinjuku-Ku Singapore 189702 Tokyo 160-0023, JAPAN Telephone: 65-6272-0082 Telephone: (81) (3)-6911-1200 Email: [email protected] Email: [email protected] Worldwide Web www.mscsoftware.com Support http://www.mscsoftware.com/Contents/Services/Technical-Support/Contact-Technical-Support.aspx Disclaimer User Documentation: Copyright 2020 MSC Software Corporation. All Rights Reserved. This document, and the software described in it, are furnished under license and may be used or copied only in accordance with the terms of such license. Any reproduction or distribution of this document, in whole or in part, without the prior written authorization of MSC Software Corporation is strictly prohibited. MSC Software Corporation reserves the right to make changes in specifications and other information contained in this document without prior notice. The concepts, methods, and examples presented in this document are for illustrative and educational purposes only and are not intended to be exhaustive or to apply to any particular engineering problem or design. THIS DOCUMENT IS PROVIDED ON AN “AS-IS” BASIS AND ALL EXPRESS AND IMPLIED CONDITIONS, REPRESENTATIONS AND WARRANTIES, INCLUDING ANY IMPLIED WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE, ARE DISCLAIMED, EXCEPT TO THE EXTENT THAT SUCH DISCLAIMERS ARE HELD TO BE LEGALLY INVALID. -

Intro to Parallel Computing
Intro To Parallel Computing John Urbanic Parallel Computing Scientist Pittsburgh Supercomputing Center Copyright 2021 Purpose of this talk ⚫ This is the 50,000 ft. view of the parallel computing landscape. We want to orient you a bit before parachuting you down into the trenches. ⚫ This talk bookends our technical content along with the Outro to Parallel Computing talk. The Intro has a strong emphasis on hardware, as this dictates the reasons that the software has the form and function that it has. Hopefully our programming constraints will seem less arbitrary. ⚫ The Outro talk can discuss alternative software approaches in a meaningful way because you will then have one base of knowledge against which we can compare and contrast. ⚫ The plan is that you walk away with a knowledge of not just MPI, etc. but where it fits into the world of High Performance Computing. FLOPS we need: Climate change analysis Simulations Extreme data • Cloud resolution, quantifying uncertainty, • “Reanalysis” projects need 100 more computing understanding tipping points, etc., will to analyze observations drive climate to exascale platforms • Machine learning and other analytics • New math, models, and systems support are needed today for petabyte data sets will be needed • Combined simulation/observation will empower policy makers and scientists Courtesy Horst Simon, LBNL Exascale combustion simulations ⚫ Goal: 50% improvement in engine efficiency ⚫ Center for Exascale Simulation of Combustion in Turbulence (ExaCT) – Combines simulation and experimentation – -

Deliverable 7.7 Deliverable Type: Report Delivered in June, 2019
Hardware developments IV E-CAM Deliverable 7.7 Deliverable Type: Report Delivered in June, 2019 E-CAM The European Centre of Excellence for Software, Training and Consultancy in Simulation and Modelling Funded by the European Union under grant agreement 676531 E-CAM Deliverable 7.7 Page ii Project and Deliverable Information Project Title E-CAM: An e-infrastructure for software, training and discussion in simulation and modelling Project Ref. Grant Agreement 676531 Project Website https://www.e-cam2020.eu EC Project Officer Juan Pelegrín Deliverable ID D7.7 Deliverable Nature Report Dissemination Level Public Contractual Date of Delivery Project Month 44(31st May, 2019) Actual Date of Delivery 25th June, 2019 Description of Deliverable Update on "Hardware Developments III" (Deliverable 7.5) which covers: - Report on hardware developments that will affect the scientific areas of inter- est to E-CAM and detailed feedback to the project software developers (STFC); - discussion of project software needs with hardware and software vendors, completion of survey of what is already available for particular hardware plat- forms (CNRS); and, - detailed output from direct face-to-face session between the project end- users, developers and hardware vendors (ICHEC). Document Control Information Title: Hardware developments IV ID: D7.7 Version: As of June, 2019 Document Status: Accepted by WP leader Available at: https://www.e-cam2020.eu/deliverables Document history: Internal Project Management Link Review Review Status: Reviewed Written by: Alan Ó Cais(JSC) Contributors: Jony Castagna (STFC), Godehard Sutmann (JSC) Authorship Reviewed by: Jony Castagna (STFC) Approved by: Godehard Sutmann (JSC) Document Keywords Keywords: E-CAM, HPC, Hardware, CECAM, Materials 25th June, 2019 Disclaimer:This deliverable has been prepared by the responsible Work Package of the Project in accordance with the Consortium Agreement and the Grant Agreement. -
ATI Radeon™ HD 2000 Series Technology Overview
C O N F I D E N T I A L ATI Radeon™ HD 2000 Series Technology Overview Richard Huddy Worldwide DevRel Manager, AMD Graphics Products Group Introducing the ATI Radeon™ HD 2000 Series ATI Radeon™ HD 2900 Series – Enthusiast ATI Radeon™ HD 2600 Series – Mainstream ATI Radeon™ HD 2400 Series – Value 2 ATI Radeon HD™ 2000 Series Highlights Technology leadership Cutting-edge image quality features • Highest clock speeds – up to 800 MHz • Advanced anti-aliasing and texture filtering capabilities • Highest transistor density – up to 700 million transistors • Fast High Dynamic Range rendering • Lowest power for mobile • Programmable Tessellation Unit 2nd generation unified architecture ATI Avivo™ HD technology • Superscalar design with up to 320 stream • Delivering the ultimate HD video processing units experience • Optimized for Dynamic Game Computing • HD display and audio connectivity and Accelerated Stream Processing DirectX® 10 Native CrossFire™ technology • Massive shader and geometry processing • Superior multi-GPU support performance • Enabling the next generation of visual effects 3 The March to Reality Radeon HD 2900 Radeon X1950 Radeon Radeon X1800 X800 Radeon Radeon 9700 9800 Radeon 8500 Radeon 4 2nd Generation Unified Shader Architecture y Development from proven and successful Command Processor Sha S “Xenos” design (XBOX 360 graphics) V h e ade der Programmable r t Settupup e x al Z Tessellator r I Scan Converter / I n C ic n s h • New dispatch processor handling thousands of Engine ons Rasterizer Engine d t c r e r u x ar e c t f -

Time Complexity Parallel Local Binary Pattern Feature Extractor on a Graphical Processing Unit
ICIC Express Letters ICIC International ⃝c 2019 ISSN 1881-803X Volume 13, Number 9, September 2019 pp. 867{874 θ(1) TIME COMPLEXITY PARALLEL LOCAL BINARY PATTERN FEATURE EXTRACTOR ON A GRAPHICAL PROCESSING UNIT Ashwath Rao Badanidiyoor and Gopalakrishna Kini Naravi Department of Computer Science and Engineering Manipal Institute of Technology Manipal Academy of Higher Education Manipal, Karnataka 576104, India f ashwath.rao; ng.kini [email protected] Received February 2019; accepted May 2019 Abstract. Local Binary Pattern (LBP) feature is used widely as a texture feature in object recognition, face recognition, real-time recognitions, etc. in an image. LBP feature extraction time is crucial in many real-time applications. To accelerate feature extrac- tion time, in many previous works researchers have used CPU-GPU combination. In this work, we provide a θ(1) time complexity implementation for determining the Local Binary Pattern (LBP) features of an image. This is possible by employing the full capa- bility of a GPU. The implementation is tested on LISS medical images. Keywords: Local binary pattern, Medical image processing, Parallel algorithms, Graph- ical processing unit, CUDA 1. Introduction. Local binary pattern is a visual descriptor proposed in 1990 by Wang and He [1, 2]. Local binary pattern provides a distribution of intensity around a center pixel. It is a non-parametric visual descriptor helpful in describing a distribution around a center value. Since digital images are distributions of intensity, it is helpful in describing an image. The pattern is widely used in texture analysis, object recognition, and image description. The local binary pattern is used widely in real-time description, and analysis of objects in images and videos, owing to its computational efficiency and computational simplicity. -

Evaluating Performance Portability of Openmp for SNAP on NVIDIA, Intel, and AMD Gpus Using the Roofline Methodology
Evaluating Performance Portability of OpenMP for SNAP on NVIDIA, Intel, and AMD GPUs using the Roofline Methodology Neil A. Mehta1, Rahulkumar Gayatri1, Yasaman Ghadar2, Christopher Knight2, and Jack Deslippe1 1 NERSC, Lawrence Berkeley National Laboratory 2 Argonne National Laboratory Abstract. In this paper, we show that OpenMP 4.5 based implementa- tion of TestSNAP, a proxy-app for the Spectral Neighbor Analysis Poten- tial (SNAP) in LAMMPS, can be ported across the NVIDIA, Intel, and AMD GPUs. Roofline analysis is employed to assess the performance of TestSNAP on each of the architectures. The main contributions of this paper are two-fold: 1) Provide OpenMP as a viable option for appli- cation portability across multiple GPU architectures, and 2) provide a methodology based on the roofline analysis to determine the performance portability of OpenMP implementations on the target architectures. The GPUs used for this work are Intel Gen9, AMD Radeon Instinct MI60, and NVIDIA Volta V100. Keywords: Roofline analysis · Performance portability · SNAP. 1 Introduction Six out of the top ten supercomputers in the list of Top500 supercomputers rely on GPUs for their compute performance. The next generation of supercom- puters, namely, Perlmutter, Aurora, and Frontier, rely primarily upon NVIDIA, Intel, and AMD GPUs, respectively, to achieve their intended peak compute bandwidths, the latter two of which will be the first exascale machines. The CPU, also referred to as the host and the GPU or device architectures that will be available on these machines are shown in Tab. 1. Table 1. CPUs and GPUs on upcoming supercomputers. System Perlmutter Aurora Frontier Host AMD Milan Intel Xeon Sapphire Rapids AMD EPYC Custom Device NVIDIA A100 Intel Xe Ponte Vecchio AMD Radeon Instinct Custom The diversity in the GPU architectures by multiple vendors has increased the importance of application portability. -
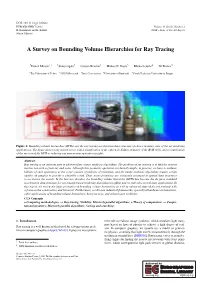
A Survey on Bounding Volume Hierarchies for Ray Tracing
DOI: 10.1111/cgf.142662 EUROGRAPHICS 2021 Volume 40 (2021), Number 2 H. Rushmeier and K. Bühler STAR – State of The Art Report (Guest Editors) A Survey on Bounding Volume Hierarchies for Ray Tracing yDaniel Meister1z yShinji Ogaki2 Carsten Benthin3 Michael J. Doyle3 Michael Guthe4 Jiríˇ Bittner5 1The University of Tokyo 2ZOZO Research 3Intel Corporation 4University of Bayreuth 5Czech Technical University in Prague Figure 1: Bounding volume hierarchies (BVHs) are the ray tracing acceleration data structure of choice in many state of the art rendering applications. The figure shows a ray-traced scene, with a visualization of the otherwise hidden structure of the BVH (left), and a visualization of the success of the BVH in reducing ray intersection operations (right). Abstract Ray tracing is an inherent part of photorealistic image synthesis algorithms. The problem of ray tracing is to find the nearest intersection with a given ray and scene. Although this geometric operation is relatively simple, in practice, we have to evaluate billions of such operations as the scene consists of millions of primitives, and the image synthesis algorithms require a high number of samples to provide a plausible result. Thus, scene primitives are commonly arranged in spatial data structures to accelerate the search. In the last two decades, the bounding volume hierarchy (BVH) has become the de facto standard acceleration data structure for ray tracing-based rendering algorithms in offline and recently also in real-time applications. In this report, we review the basic principles of bounding volume hierarchies as well as advanced state of the art methods with a focus on the construction and traversal. -

Ati Radeon Hd 5770 Mac Review All Manuals
Ati radeon hd 5770 mac review All Manuals Ati radeon hd 5770 mac review . Download: Ati radeon hd 5770 mac review XFX Radeon HD 5770 1 GB DDR5 PCIE Graphics Card HD577AZNFC 4.4 out of 5 stars (87). Explore similar items ATI Radeon HD 4870 Graphics Upgrade Kit for Apple Mac Pro 2 of 2 people found the following review helpful. Excellent. Get Immersive DirectX 11 gaming with ATI Radeon HD 5770 graphics. Mac Pro quad-core review: A good investment for users of multi-core Mac apps an ATI Radeon HD 5770 video card with 1GB of video RAM, the late 2013 Mac. This is an ATI Radeon HD 5770 Graphics Video Card pulled working from a 2008 Mac Pro. It is in perfect working condition. This card was flashed for the Mac. Document/File: ati-radeon-hd-5770-mac.pdf, filesize: n/a. 10030s Is there a tutorial, or a place in the users manual, which I need to review? 3.4 GHz,ATI. So we thought wed try a different approach: the Resolume Benchmark, patent pending. Model: Mac Pro desktop GPU: ATI Radeon HD 5770, 1024 MB That left the original Mac Pro behind in the dust as well. I have the same Mac Pro spec wise as you, same Apple ATI Radeon HD 5770 with both. Bringing this beast of a computer up to next-gen speeds! (Just about) Look out for a gaming. Sid Meiers Civilization: Beyond Earth is coming to Mac and Linux this holiday season! ATI Radeon X1000 series, HD 2000 series, 3870, 4670, 6490, 6630, NVIDIA I have a mid-2010 Mac Pro with an ATI Radeon HD 5770, it seems so close to Steam Tuesdays 20% week in review weekly flashback Weekly Roundup. -

Why You Need the EVGA E-Geforce 6800 GS
Why You Need the EVGA e-GeForce 6800 GS GeForce 6800 GS Profile NVIDIA’s announcement of a new GPU product hailing from the now legendary GeForce 6 series adds new fire to the lineup in the form of the GeForce 6800 GS. This powerful cast now reads as GeForce 6800 Ultra, GeForce 6800 GT, GeForce 6800, GeForce 6800 LE AND GeForce 6800 GS. As we know, the GeForce 6 series takes a step back to the more powerful and newer GeForce 7 series released recently. So why did NVIDIA release a new GPU for an older product line? Is it simply a holiday season marketing push, or does the answer have something to do with rival ATI? ATI expanded the RADEON X800 series product line with two new VPU products – the RADEON X800 GT and RADEON X800 GTO - just prior to their announcement of the new RADEON X1000 series. The former is an 8 pixel pipe product, while the latter is built with 12 pipes. Both are targeted for the mid-range market. These new “GT” VPUs place a lot of pressure to NVIDIA’s GeForce 6600 GT (8 pixel pipes) and GeForce 6800 (12 pixel pipes) and forces the company to respond with a new product to meet the challenge head-on. Many of NVIDIA fans might prefer new GeForce 7 products for the mid-range market, but NVIDIA still needs time to prepare them. In fact, NVIDIA’s older but more mature GeForce 6600 or GeForce 6800 series products can be improved to provide enough power to compete with the RADEON X800 GT and GTO. -

Intro to Parallel Computing
Intro To Parallel Computing John Urbanic Parallel Computing Scientist Pittsburgh Supercomputing Center Copyright 2021 Purpose of this talk ⚫ This is the 50,000 ft. view of the parallel computing landscape. We want to orient you a bit before parachuting you down into the trenches to deal with MPI. ⚫ This talk bookends our technical content along with the Outro to Parallel Computing talk. The Intro has a strong emphasis on hardware, as this dictates the reasons that the software has the form and function that it has. Hopefully our programming constraints will seem less arbitrary. ⚫ The Outro talk can discuss alternative software approaches in a meaningful way because you will then have one base of knowledge against which we can compare and contrast. ⚫ The plan is that you walk away with a knowledge of not just MPI, etc. but where it fits into the world of High Performance Computing. FLOPS we need: Climate change analysis Simulations Extreme data • Cloud resolution, quantifying uncertainty, • “Reanalysis” projects need 100 more computing understanding tipping points, etc., will to analyze observations drive climate to exascale platforms • Machine learning and other analytics • New math, models, and systems support are needed today for petabyte data sets will be needed • Combined simulation/observation will empower policy makers and scientists Courtesy Horst Simon, LBNL Exascale combustion simulations ⚫ Goal: 50% improvement in engine efficiency ⚫ Center for Exascale Simulation of Combustion in Turbulence (ExaCT) – Combines simulation and