On Choosing Between Deterministic and Indeterministic Models: Underdetermination and Indirect Evidence
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Values in Science Beyond Underdetermination and Inductive Risk
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by PhilSci Archive Values in Science beyond Underdetermination and Inductive Risk Matthew J. Brown Center for Values in Medicine, Science, and Technology The University of Texas at Dallas [email protected] July 12, 2012 Abstract The thesis that the practice and evaluation of science requires social value- judgment, that good science is not value-free or value-neutral but value-laden, has been gaining acceptance among philosophers of science. The main pro- ponents of the value-ladenness of science rely on either arguments from the underdetermination of theory by evidence or arguments from inductive risk. Both arguments share the premise that we should only consider values once the evidence runs out, or where it leaves uncertainty; they adopt a criterion of lexical priority of evidence over values. The motivation behind lexical pri- ority is to avoid reaching conclusions on the basis of wishful thinking rather than good evidence. The problem of wishful thinking is indeed real|it would be an egregious error to adopt beliefs about the world because they comport with how one would prefer the world to be. I will argue, however, that giving lexical priority to evidential considerations over values is a mistake, and unnec- essary for adequately avoiding the problem of wishful thinking. Values have a deeper role to play in science than proponents of the underdetermination and inductive risk arguments have suggested. 1 Introduction This paper is part of the larger project of trying to understand the structure of values in science, i.e., the role of values in the logic of scientific practice. -

An Introduction to Mathematical Modelling
An Introduction to Mathematical Modelling Glenn Marion, Bioinformatics and Statistics Scotland Given 2008 by Daniel Lawson and Glenn Marion 2008 Contents 1 Introduction 1 1.1 Whatismathematicalmodelling?. .......... 1 1.2 Whatobjectivescanmodellingachieve? . ............ 1 1.3 Classificationsofmodels . ......... 1 1.4 Stagesofmodelling............................... ....... 2 2 Building models 4 2.1 Gettingstarted .................................. ...... 4 2.2 Systemsanalysis ................................. ...... 4 2.2.1 Makingassumptions ............................. .... 4 2.2.2 Flowdiagrams .................................. 6 2.3 Choosingmathematicalequations. ........... 7 2.3.1 Equationsfromtheliterature . ........ 7 2.3.2 Analogiesfromphysics. ...... 8 2.3.3 Dataexploration ............................... .... 8 2.4 Solvingequations................................ ....... 9 2.4.1 Analytically.................................. .... 9 2.4.2 Numerically................................... 10 3 Studying models 12 3.1 Dimensionlessform............................... ....... 12 3.2 Asymptoticbehaviour ............................. ....... 12 3.3 Sensitivityanalysis . ......... 14 3.4 Modellingmodeloutput . ....... 16 4 Testing models 18 4.1 Testingtheassumptions . ........ 18 4.2 Modelstructure.................................. ...... 18 i 4.3 Predictionofpreviouslyunuseddata . ............ 18 4.3.1 Reasonsforpredictionerrors . ........ 20 4.4 Estimatingmodelparameters . ......... 20 4.5 Comparingtwomodelsforthesamesystem . ......... -

Indeterminism in Physics and Intuitionistic Mathematics
Indeterminism in Physics and Intuitionistic Mathematics Nicolas Gisin Group of Applied Physics, University of Geneva, 1211 Geneva 4, Switzerland (Dated: November 5, 2020) Most physics theories are deterministic, with the notable exception of quantum mechanics which, however, comes plagued by the so-called measurement problem. This state of affairs might well be due to the inability of standard mathematics to “speak” of indeterminism, its inability to present us a worldview in which new information is created as time passes. In such a case, scientific determinism would only be an illusion due to the timeless mathematical language scientists use. To investigate this possibility it is necessary to develop an alternative mathematical language that is both powerful enough to allow scientists to compute predictions and compatible with indeterminism and the passage of time. We argue that intuitionistic mathematics provides such a language and we illustrate it in simple terms. I. INTRODUCTION I have always been amazed by the huge difficulties that my fellow physicists seem to encounter when con- templating indeterminism and the highly sophisticated Physicists are not used to thinking of the world as in- circumlocutions they are ready to swallow to avoid the determinate and its evolution as indeterministic. New- straightforward conclusion that physics does not neces- ton’s equations, like Maxwell’s and Schr¨odinger’s equa- sarily present us a deterministic worldview. But even tions, are (partial) differential equations describing the more surprising to me is the attitude of most philoso- continuous evolution of the initial condition as a func- phers, especially philosophers of science. Indeed, most tion of a parameter identified with time. -

Wittgenstein on Freedom of the Will: Not Determinism, Yet Not Indeterminism
Wittgenstein on Freedom of the Will: Not Determinism, Yet Not Indeterminism Thomas Nadelhoffer This is a prepublication draft. This version is being revised for resubmission to a journal. Abstract Since the publication of Wittgenstein’s Lectures on Freedom of the Will, his remarks about free will and determinism have received very little attention. Insofar as these lectures give us an opportunity to see him at work on a traditional—and seemingly intractable—philosophical problem and given the voluminous secondary literature written about nearly every other facet of Wittgenstein’s life and philosophy, this neglect is both surprising and unfortunate. Perhaps these lectures have not attracted much attention because they are available to us only in the form of a single student’s notes (Yorick Smythies). Or perhaps it is because, as one Wittgenstein scholar put it, the lectures represent only “cursory reflections” that “are themselves uncompelling." (Glock 1996: 390) Either way, my goal is to show that Wittgenstein’s views about freedom of the will merit closer attention. All of these arguments might look as if I wanted to argue for the freedom of the will or against it. But I don't want to. --Ludwig Wittgenstein, Lectures on Freedom of the Will Since the publication of Wittgenstein’s Lectures on Freedom of the Will,1 his remarks from these lectures about free will and determinism have received very little attention.2 Insofar as these lectures give us an opportunity to see him at work on a traditional—and seemingly intractable— philosophical problem and given the voluminous secondary literature written about nearly every 1 Wittgenstein’s “Lectures on Freedom of the Will” will be abbreviated as LFW 1993 in this paper (see bibliography) since I am using the version reprinted in Philosophical Occasions (1993). -

Clustering and Classification of Multivariate Stochastic Time Series
Clemson University TigerPrints All Dissertations Dissertations 5-2012 Clustering and Classification of Multivariate Stochastic Time Series in the Time and Frequency Domains Ryan Schkoda Clemson University, [email protected] Follow this and additional works at: https://tigerprints.clemson.edu/all_dissertations Part of the Mechanical Engineering Commons Recommended Citation Schkoda, Ryan, "Clustering and Classification of Multivariate Stochastic Time Series in the Time and Frequency Domains" (2012). All Dissertations. 907. https://tigerprints.clemson.edu/all_dissertations/907 This Dissertation is brought to you for free and open access by the Dissertations at TigerPrints. It has been accepted for inclusion in All Dissertations by an authorized administrator of TigerPrints. For more information, please contact [email protected]. Clustering and Classification of Multivariate Stochastic Time Series in the Time and Frequency Domains A Dissertation Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy Mechanical Engineering by Ryan F. Schkoda May 2012 Accepted by: Dr. John Wagner, Committee Chair Dr. Robert Lund Dr. Ardalan Vahidi Dr. Darren Dawson Abstract The dissertation primarily investigates the characterization and discrimina- tion of stochastic time series with an application to pattern recognition and fault detection. These techniques supplement traditional methodologies that make overly restrictive assumptions about the nature of a signal by accommodating stochastic behavior. The assumption that the signal under investigation is either deterministic or a deterministic signal polluted with white noise excludes an entire class of signals { stochastic time series. The research is concerned with this class of signals almost exclusively. The investigation considers signals in both the time and the frequency domains and makes use of both model-based and model-free techniques. -

Random Matrix Eigenvalue Problems in Structural Dynamics: an Iterative Approach S
Mechanical Systems and Signal Processing 164 (2022) 108260 Contents lists available at ScienceDirect Mechanical Systems and Signal Processing journal homepage: www.elsevier.com/locate/ymssp Random matrix eigenvalue problems in structural dynamics: An iterative approach S. Adhikari a,<, S. Chakraborty b a The Future Manufacturing Research Institute, Swansea University, Swansea SA1 8EN, UK b Department of Applied Mechanics, Indian Institute of Technology Delhi, India ARTICLEINFO ABSTRACT Communicated by J.E. Mottershead Uncertainties need to be taken into account in the dynamic analysis of complex structures. This is because in some cases uncertainties can have a significant impact on the dynamic response Keywords: and ignoring it can lead to unsafe design. For complex systems with uncertainties, the dynamic Random eigenvalue problem response is characterised by the eigenvalues and eigenvectors of the underlying generalised Iterative methods Galerkin projection matrix eigenvalue problem. This paper aims at developing computationally efficient methods for Statistical distributions random eigenvalue problems arising in the dynamics of multi-degree-of-freedom systems. There Stochastic systems are efficient methods available in the literature for obtaining eigenvalues of random dynamical systems. However, the computation of eigenvectors remains challenging due to the presence of a large number of random variables within a single eigenvector. To address this problem, we project the random eigenvectors on the basis spanned by the underlying deterministic eigenvectors and apply a Galerkin formulation to obtain the unknown coefficients. The overall approach is simplified using an iterative technique. Two numerical examples are provided to illustrate the proposed method. Full-scale Monte Carlo simulations are used to validate the new results. -
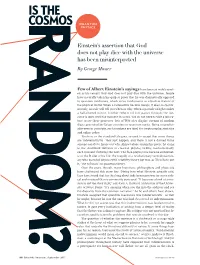
Is the Cosmos Random?
IS THE RANDOM? COSMOS QUANTUM PHYSICS Einstein’s assertion that God does not play dice with the universe has been misinterpreted By George Musser Few of Albert Einstein’s sayings have been as widely quot- ed as his remark that God does not play dice with the universe. People have naturally taken his quip as proof that he was dogmatically opposed to quantum mechanics, which views randomness as a built-in feature of the physical world. When a radioactive nucleus decays, it does so sponta- neously; no rule will tell you when or why. When a particle of light strikes a half-silvered mirror, it either reflects off it or passes through; the out- come is open until the moment it occurs. You do not need to visit a labora- tory to see these processes: lots of Web sites display streams of random digits generated by Geiger counters or quantum optics. Being unpredict- able even in principle, such numbers are ideal for cryptography, statistics and online poker. Einstein, so the standard tale goes, refused to accept that some things are indeterministic—they just happen, and there is not a darned thing anyone can do to figure out why. Almost alone among his peers, he clung to the clockwork universe of classical physics, ticking mechanistically, each moment dictating the next. The dice-playing line became emblemat- ic of the B side of his life: the tragedy of a revolutionary turned reaction- ary who upended physics with relativity theory but was, as Niels Bohr put it, “out to lunch” on quantum theory. -
![Arxiv:2103.07954V1 [Math.PR] 14 Mar 2021 Suppose We Ask a Randomly Chosen Person Two Questions](https://docslib.b-cdn.net/cover/7197/arxiv-2103-07954v1-math-pr-14-mar-2021-suppose-we-ask-a-randomly-chosen-person-two-questions-757197.webp)
Arxiv:2103.07954V1 [Math.PR] 14 Mar 2021 Suppose We Ask a Randomly Chosen Person Two Questions
Contents, Contexts, and Basics of Contextuality Ehtibar N. Dzhafarov Purdue University Abstract This is a non-technical introduction into theory of contextuality. More precisely, it presents the basics of a theory of contextuality called Contextuality-by-Default (CbD). One of the main tenets of CbD is that the identity of a random variable is determined not only by its content (that which is measured or responded to) but also by contexts, systematically recorded condi- tions under which the variable is observed; and the variables in different contexts possess no joint distributions. I explain why this principle has no paradoxical consequences, and why it does not support the holistic “everything depends on everything else” view. Contextuality is defined as the difference between two differences: (1) the difference between content-sharing random variables when taken in isolation, and (2) the difference between the same random variables when taken within their contexts. Contextuality thus defined is a special form of context-dependence rather than a synonym for the latter. The theory applies to any empir- ical situation describable in terms of random variables. Deterministic situations are trivially noncontextual in CbD, but some of them can be described by systems of epistemic random variables, in which random variability is replaced with epistemic uncertainty. Mathematically, such systems are treated as if they were ordinary systems of random variables. 1 Contents, contexts, and random variables The word contextuality is used widely, usually as a synonym of context-dependence. Here, however, contextuality is taken to mean a special form of context-dependence, as explained below. Histori- cally, this notion is derived from two independent lines of research: in quantum physics, from studies of existence or nonexistence of the so-called hidden variable models with context-independent map- ping [1–10],1 and in psychology, from studies of the so-called selective influences [11–18]. -

Is Structural Underdetermination Possible?
In: Synthese , special issue “Theoretical Frameworks and Empirical Underdetermination”. Submitted November 2008, revised March 4, 2009. Is Structural Underdetermination Possible? Holger Lyre 1 Abstract Structural realism is sometimes said to undermine the theory underdetermination (TUD) argument against realism, since, in usual TUD scenarios, the supposed underdetermination concerns the object-like theoretical content but not the structural content. The paper explores the possibility of structural TUD by considering some special cases from modern physics, but also questions the validity of the TUD argument itself. The upshot is that cases of structural TUD cannot be excluded, but that TUD is perhaps not such a terribly serious anti-realistic argument. 1. The Thesis of Theory Underdetermination and its Neighbours For some the thesis of theory underdetermination (TUD) belongs to the common wisdom of philosophy of science: TUD: For any theory T and any body of observation O there exists another theory T*, such that T and T* are empirically equivalent, but ontologically different. The central intuition behind TUD is that since theory exceeds observation it is more than plausible to assume that there always exit many, if not infinitely many, rivals to any given theory that satisfy the corresponding body of empirical evidence. The TUD thesis can in particular be found in Quine (1975): „If all observable events can be accounted for in one comprehensive scientific theory – one system of the world... – then we may expect that they can all be accounted for equally in another, conflicting system of the world. We may expect this because of how scientists work. For they do not resist with mere inductive generalizations of their observations: mere extrapolations to observable events from similar observed events. -

FAKHRI-THESIS.Pdf (304.2Kb)
An Underdetermination Argument against Underdetermination by Omar Fakhri, B.A. A Thesis In PHILOSOPHY Submitted to the Graduate Faculty of Texas Tech University in Partial Fulfillment of the Requirements for the Degree of MASTER OF ARTS Approved Dustin Tucker Chair of Committee Jonathan Dorsey Peggy Gordon Miller Dean of the Graduate School May, 2012 Copyright 2012, Omar Fakhri Texas Tech University, Omar Fakhri, May 2012 ACKNOWELDGEMENTS I would like to thank Professor Dustin Tucker and Professor Jonathan Dorsey. Without their constant help and comments, this thesis would have not been manageable. I owe a great deal to Professor Tucker for helpful tips on writing style. He spent hours working on clarifying the text, without which my thesis would be substantially less clear. I would also like to thank Dr. Mark Webb, the Chair of the philosophy department, and Dr. Daniel Nathan, for allowing me to stay for an extra year and work on this thesis. Of course, any error in this thesis is my fault and my fault alone. ii Texas Tech University, Omar Fakhri, May 2012 TABLE OF CONTENTS ACKNOWELDGEMENTS ............................................................................................................. ii ABSTRACT .................................................................................................................................... iv I. INTRODUCTION ........................................................................................................................ 1 II. TWO EXAMPLES OF UNDERDETERMINATION ARGUMENTS ..................................... -

PA As a Stochastic Process
Anti-Essentialism in Public Administration Conference A decentering tendency has undermined the foundations of public administration theory Fort Lauderdale, FL March 2-3, 2007 Theorizing Public Administration as a Stochastic Process Catherine Horiuchi University of San Francisco Working Paper: Not for attribution or citation with author’s permission Abstract The capacity of information networks to capture and manipulate ever-larger streams of globally acquired, real-time data accelerates fragmentation of traditional public administration protocols, away from managing stable states toward temporary and permeable framing of governmental and corporate interests. Technologies simultaneously provide historic opportunities for dissent, individualism, and small-d democratic movements. Intermittent, overlapping governance – characterized by private government, small wars, state failures, and opportunistic shifts of power and capital from public stewardship to private parties – results in ideological or pragmatic retreats from and progressions of institutional boundaries. Ephemeral balances rather than negotiated long-term settlements demark the edges of public and private. This fluidity of realms increasingly affects the duration and allocation of administrative responsibilities between formerly firmly edged divisions of local, state, and national governments. The assumption of a static state in public administration theory does not hold. Government becomes a metaphorical fluid, an eddy that retains its shape more or less, long enough to become an object of analysis and action. The new assumption of administrative fluidity invokes a world of measurement estimating impacts of partially ordered and partially stochastic events. Sensemaking derives from sophisticated evaluative and probabilistic analyses. Traditional construction of the field with its assumption of durable governmental operations may no longer be a best-fit theory for multi-layered, ephemeral states. -
MCA 504 Modelling and Simulation
MCA 504 Modelling and Simulation Index Sr.No. Unit Name of Unit 1 UNIT – I SYSTEM MODELS & SYSTEM SIMULATION 2 UNIT – II VRIFICATION AND VALIDATION OF MODEL 3 UNIT – III DIFFERENTIAL EQUATIONS IN SIMULATION 4 UNIT – IV DISCRETE SYSTEM SIMULATION 5 UNIT – V CONTINUOUS SIMULATION 6 UNIT – VI SIMULATION LANGUAGE 7 UNIT – USE OF DATABASE, A.I. IN MODELLING AND VII SIMULATION Total No of Pages Page 1 of 138 Subject : System Simulation and Modeling Author : Jagat Kumar Paper Code: MCA 504 Vetter : Dr. Pradeep Bhatia Lesson : System Models and System Simulation Lesson No. : 01 Structure 1.0 Objective 1.1 Introduction 1.1.1 Formal Definitions 1.1.2 Brief History of Simulation 1.1.3 Application Area of Simulation 1.1.4 Advantages and Disadvantages of Simulation 1.1.5 Difficulties of Simulation 1.1.6 When to use Simulation? 1.2 Modeling Concepts 1.2.1 System, Model and Events 1.2.2 System State Variables 1.2.2.1 Entities and Attributes 1.2.2.2 Resources 1.2.2.3 List Processing 1.2.2.4 Activities and Delays 1.2.2.5 1.2.3 Model Classifications 1.2.3.1 Discrete-Event Simulation Model 1.2.3.2 Stochastic and Deterministic Systems 1.2.3.3 Static and Dynamic Simulation 1.2.3.4 Discrete vs Continuous Systems 1.2.3.5 An Example 1.3 Computer Workload and Preparation of its Models 1.3.1Steps of the Modeling Process 1.4 Summary 1.5 Key words 1.6 Self Assessment Questions 1.7 References/ Suggested Reading Page 2 of 138 1.0 Objective The main objective of this module to gain the knowledge about system and its behavior so that a person can transform the physical behavior of a system into a mathematical model that can in turn transform into a efficient algorithm for simulation purpose.