Development of a Cold Gas Propulsion System for the TALARIS Hopper
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Transport of Dangerous Goods
ST/SG/AC.10/1/Rev.16 (Vol.I) Recommendations on the TRANSPORT OF DANGEROUS GOODS Model Regulations Volume I Sixteenth revised edition UNITED NATIONS New York and Geneva, 2009 NOTE The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. ST/SG/AC.10/1/Rev.16 (Vol.I) Copyright © United Nations, 2009 All rights reserved. No part of this publication may, for sales purposes, be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, electrostatic, magnetic tape, mechanical, photocopying or otherwise, without prior permission in writing from the United Nations. UNITED NATIONS Sales No. E.09.VIII.2 ISBN 978-92-1-139136-7 (complete set of two volumes) ISSN 1014-5753 Volumes I and II not to be sold separately FOREWORD The Recommendations on the Transport of Dangerous Goods are addressed to governments and to the international organizations concerned with safety in the transport of dangerous goods. The first version, prepared by the United Nations Economic and Social Council's Committee of Experts on the Transport of Dangerous Goods, was published in 1956 (ST/ECA/43-E/CN.2/170). In response to developments in technology and the changing needs of users, they have been regularly amended and updated at succeeding sessions of the Committee of Experts pursuant to Resolution 645 G (XXIII) of 26 April 1957 of the Economic and Social Council and subsequent resolutions. -

1 the Merits of Cold Gas Micropropulsion in State-Of
IAC-02-S.2.07 THE MERITS OF COLD GAS MICROPROPULSION IN STATE-OF-THE-ART SPACE MISSIONS Hugo Nguyen, Johan Köhler and Lars Stenmark The Ångström Space Technology Centre, Uppsala University, Box 534, SE-751 21 Uppsala, Sweden. [email protected] Fax: +46 18 471 3572 Abstract: Cold gas micropropulsion is a sound 1. INTRODUCTION choice for space missions that require extreme For Attitude and Orbit Control System (AOCS) stabilisation, pointing precision or contamination- requirements on extreme stabilisation, pointing free operation. The use of forces in the micronewton precision, contamination-free operation is the range for spacecraft operations has been identified as most important for many missions. Examples a mission-critical item in several demanding space include DARWIN, LISA, SIM, NGST, and those systems currently under development. which have optical or other equipments pointing Cold gas micropropulsion systems share merits with exactly to a certain object or in a certain direction. traditional cold gas systems in being simple in Other obviously desirable properties include design, clean, safe, and robust. They do not generate design simplicity, cleanliness, safety, robustness, net charge to the spacecraft, and typically operate on low-power operation, no net charge generation to low-power. The minute size is suitable not only for the craft, together with low mass, and a wide inclusion on high-performance nanosatellites but dynamic range. Cold gas micropropulsion has also for high-demanding future space missions of those merits and in the present paper, larger sizes. technological solutions will be treated By using differently sized nozzles in parallel emphatically, at the same time the mentioned systems the dynamic range of a cold gas merits will be brought out clearly. -
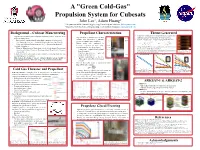
A "Green Cold-Gas" Propulsion System for Cubesats
A "Green Cold-Gas" Propulsion System for Cubesats John Lee1, Adam Huang2 1 Department of Mechanical Engineering, University of Arkansas, [email protected] 2 Department of Mechanical Engineering, University of Arkansas, [email protected] Background – Cubesat Maneuvering Propellant Characterization Thrust Generated • Current Cubesat maneuvering techniques are mainly passive, with little to no • Vaporizing a propellant via nanochannels to vacuum was • Experiments were conducted in a vacuum HD Lifecam ability to change orbits. studied as a means of propulsion for small satellites. chamber that maintained a milliTorr • Specific impulse (Isp) - measure of propellant efficiency • Basic attitude control primarily using Earth’s magnetic field or gravity. Black Out Bell Jar Curtain pressure to simulate space conditions 훾+1 훾푅푇 ∗ ∗ • Very low torque, long time-constant stability (hours), and low accuracy. 푐 훾 2 2 훾−1 푐 = 훾+1 • Various trials were conducted to 퐼푠푝 = where 2 2훾−1 푔 훾 − 1 훾 + 1 훾 • Near-term flights with momentum wheels. Need momentum dumping. 0 훾 + 1 determine properties of vapor phase Light Source • Available technologies aqueous propylene glycol by varying: Test Apparatus • Using Aqueous PG Isp and nanochannel array dimensions • Magnets, Magnetorquers, Momentum wheels (needs dump), Conventional 250μm • Temperature – controlled with a bang- Mass Scale the theoretical thrust was calculated thrusters (solid, fluid thrusters), Gravity gradient, Drag, Electric Thrusters bang thermostat • Thrust is tuned by adjusted the nanochannel dimensions -
Industry at the Edge of Space Other Springer-Praxis Books of Related Interest by Erik Seedhouse
IndustryIndustry atat thethe EdgeEdge ofof SpaceSpace ERIK SEEDHOUSE S u b o r b i t a l Industry at the Edge of Space Other Springer-Praxis books of related interest by Erik Seedhouse Tourists in Space: A Practical Guide 2008 ISBN: 978-0-387-74643-2 Lunar Outpost: The Challenges of Establishing a Human Settlement on the Moon 2008 ISBN: 978-0-387-09746-6 Martian Outpost: The Challenges of Establishing a Human Settlement on Mars 2009 ISBN: 978-0-387-98190-1 The New Space Race: China vs. the United States 2009 ISBN: 978-1-4419-0879-7 Prepare for Launch: The Astronaut Training Process 2010 ISBN: 978-1-4419-1349-4 Ocean Outpost: The Future of Humans Living Underwater 2010 ISBN: 978-1-4419-6356-7 Trailblazing Medicine: Sustaining Explorers During Interplanetary Missions 2011 ISBN: 978-1-4419-7828-8 Interplanetary Outpost: The Human and Technological Challenges of Exploring the Outer Planets 2012 ISBN: 978-1-4419-9747-0 Astronauts for Hire: The Emergence of a Commercial Astronaut Corps 2012 ISBN: 978-1-4614-0519-1 Pulling G: Human Responses to High and Low Gravity 2013 ISBN: 978-1-4614-3029-2 SpaceX: Making Commercial Spacefl ight a Reality 2013 ISBN: 978-1-4614-5513-4 E r i k S e e d h o u s e Suborbital Industry at the Edge of Space Dr Erik Seedhouse, M.Med.Sc., Ph.D., FBIS Milton Ontario Canada SPRINGER-PRAXIS BOOKS IN SPACE EXPLORATION ISBN 978-3-319-03484-3 ISBN 978-3-319-03485-0 (eBook) DOI 10.1007/978-3-319-03485-0 Springer Cham Heidelberg New York Dordrecht London Library of Congress Control Number: 2013956603 © Springer International Publishing Switzerland 2014 This work is subject to copyright. -

6. Chemical-Nuclear Propulsion MAE 342 2016
2/12/20 Chemical/Nuclear Propulsion Space System Design, MAE 342, Princeton University Robert Stengel • Thermal rockets • Performance parameters • Propellants and propellant storage Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE342.html 1 1 Chemical (Thermal) Rockets • Liquid/Gas Propellant –Monopropellant • Cold gas • Catalytic decomposition –Bipropellant • Separate oxidizer and fuel • Hypergolic (spontaneous) • Solid Propellant ignition –Mixed oxidizer and fuel • External ignition –External ignition • Storage –Burn to completion – Ambient temperature and pressure • Hybrid Propellant – Cryogenic –Liquid oxidizer, solid fuel – Pressurized tank –Throttlable –Throttlable –Start/stop cycling –Start/stop cycling 2 2 1 2/12/20 Cold Gas Thruster (used with inert gas) Moog Divert/Attitude Thruster and Valve 3 3 Monopropellant Hydrazine Thruster Aerojet Rocketdyne • Catalytic decomposition produces thrust • Reliable • Low performance • Toxic 4 4 2 2/12/20 Bi-Propellant Rocket Motor Thrust / Motor Weight ~ 70:1 5 5 Hypergolic, Storable Liquid- Propellant Thruster Titan 2 • Spontaneous combustion • Reliable • Corrosive, toxic 6 6 3 2/12/20 Pressure-Fed and Turbopump Engine Cycles Pressure-Fed Gas-Generator Rocket Rocket Cycle Cycle, with Nozzle Cooling 7 7 Staged Combustion Engine Cycles Staged Combustion Full-Flow Staged Rocket Cycle Combustion Rocket Cycle 8 8 4 2/12/20 German V-2 Rocket Motor, Fuel Injectors, and Turbopump 9 9 Combustion Chamber Injectors 10 10 5 2/12/20 -

A Detailed Study and Analysis of Cold Gas Propulsion System
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 10 | Oct 2020 www.irjet.net p-ISSN: 2395-0072 A Detailed Study and Analysis of Cold Gas Propulsion System Ansh Atul Mishra1 Akshat Mohite2 1Diploma Student, Dept. of Aeronautical Engineering, Hindustan Academy, Karnataka, India 2Dept. of Mechanical Engineering, A.P. Shah Institute of Technology, Maharashtra, India. ---------------------------------------------------------------------***---------------------------------------------------------------------- Abstract - As we know, propulsion systems are very important applications and benefits of this system will also be for moving a body. One of the many systems of power discussed in the paper. Fig-1 shows the schematic diagram of generation is the cold gas system which we will discuss in this cold gas propulsion system. paper. This system utilizes a generally inert pressurized gas to produce thrust. Unlike the conventional propulsion systems, it does not use combustion. It is a cost-effective, simple, and authentic delivery system available in a multitude of applications for guidance and attitude control. Due to its economic benefits, it is being studied extensively. This paper will provide an overview of the operating principle, various propellants, operating principle, equipments, performance characteristics such as thrust and specific impulse, the benefits of cold gas thrusters, and their applications. Key Words: Propulsion system, cold gas propulsion, thrust, cost effective, attitude control, performance characteristics 1. INTRODUCTION Nanosatellites are obtaining great interest from industry and Fig -1: Schematic diagram of cold gas propulsion system governments for a range of missions including global ship from opendesignengine.net monitoring, global water monitoring, distributed radio telescope in space and Integrated Meteorological / Precise 2. -

The Water Electrolysis Hall Effect Thruster (WET-HET)
The Water Electrolysis Hall Effect Thruster (WET-HET): Paving the Way to Dual Mode Chemical-Electric Water Propulsion. IEPC-2019-A-259 Presented at the 36th International Electric Propulsion Conference University of Vienna, Austria September 15-20, 2019 Alexander Schwertheim∗ and Aaron Knolly Imperial College London, London, United Kingdom We propose that a Hall Effect Thruster (HET) could be modified to operate on the hydrogen and oxygen produced by the in situ electrolysis of water. Such a system would benefit from the high storage density, low cost and prevalence of water, while also increasing specific impulse. The poisoning of traditional Lanthanum Hexaboride cathodes can be mit- igated by operating the thruster on oxygen but the neutraliser on hydrogen. The proposed hydrogen/oxygen electric propulsion system can be combined with a hydrogen/oxygen chemical propulsion system, granting a spacecraft dual mode propulsion capabilities. Such a system architecture saves mass by utilising a single propellant storage and management system, yet can perform both high thrust chemical burns and high impulse electric burns, unlocking novel mission trajectories not possible with a single propulsion system. Even fur- ther mass saving can be achieved by replacing traditional batteries with a fuel cell system, combining power storage and propulsion into a single system architecture. The Water Electrolysis Hall Effect Thruster (WET-HET) is presented. The channel dimensions have been optimised for oxygen operation using PlasmaSim, a zero dimensional particle-in-cell model developed in-house. We validate the effectiveness of PlasmaSim to optimise a thruster geometry by conducting a sensitivity analysis on a conventional SPT100 thruster operating on xenon. -
Development and Testing of a 3D-Printed Cold Gas Thruster for an Interplanetary Cubesat
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < 1 Development and Testing of a 3D-Printed Cold Gas Thruster for an Interplanetary CubeSat E. Glenn Lightsey, Terry Stevenson, and Matthew Sorgenfrei [4]. More recently, NASA Ames developed a fleet of eight 1.5U This paper describes the development and testing of a cold gas CubeSats for the Edison Demonstration of SmallSat Networks attitude control thruster produced for the BioSentinel spacecraft, a (EDSN) mission, which would have demonstrated multi-point CubeSat that will operate beyond Earth orbit. The thruster will science operations in LEO [5]. Unfortunately, EDSN suffered a reduce the spacecraft rotational velocity after deployment, and for the remainder of the mission it will periodically unload momentum launch vehicle failure prior to deployment. from the reaction wheels. The majority of the thruster is a single The BioSentinel mission presents a unique opportunity for piece of 3D-printed additive material which incorporates the NASA Ames in that this spacecraft not only requires a wide propellant tanks, feed pipes, and nozzles. Combining these elements range of advanced technologies for successful operation, but allows for more efficient use of the available volume and reduces the will also operate in a space environment that has not yet been potential for leaks. The system uses a high-density commercial encountered by CubeSats. BioSentinel is a 6U CubeSat that will refrigerant as the propellant, due to its high volumetric impulse efficiency, as well as low toxicity and low storage pressure. Two launch on the first flight of the Space Launch System (SLS), a engineering development units and one flight unit have been heavy-lift rocket being developed by NASA to enable future produced for the BioSentinel mission. -

0.0 a New Way to Look at Things George Nield FINAL
A NEW WAY TO LOOK AT THINGS by ∗ George C. Nield ood evening everyone. I am not sure how many of you are aware of it, but today is the anniversary of a very significant event G in the development of mankind’s understanding of the Universe. It was on 24 May 1543, that Nicolaus Copernicus is said to have published his most important work, which was titled "On the Revolutions of the Celestial Spheres." Previously, based on the writings of Aristotle and Ptolemy, it had been assumed that the Earth was located at the very center of the universe. Copernicus rejected that approach. Instead, he showed how a model of the Solar System in which the Earth and other planets traveled in orbits around the Sun was better able to account for the observed motions of the heavenly bodies. Although Copernicus did not attempt to explain what would cause such motions, the publication of his heliocentric theory provided a new way to look at things, and it is often hailed as marking the beginning of the scientific revolution. We have come a long way since then in our knowledge of physics, mathematics, and astronomy. At the same time, with the recent retirement of the Space Shuttle, we are currently in the process of undergoing a huge change ∗ Associate Administrator, Commercial Space Transportation, Federal Aviation Administration, Washington, DC, USA. REGULATION OF EMERGING MODES OF AEROSPACE TRANSPORTATION in how we travel to and operate in outer space, and how we think about spaceflight. Ever since the very beginning of the space age, more than 50 years ago, almost every space activity, milestone, and accomplishment has been under the direction and control of national governments, which in the US has meant NASA or the Department of Defense. -

Rockets Vie in Simulated Lunar Landing Contest 17 September 2009, by JOHN ANTCZAK , Associated Press
Rockets vie in simulated lunar landing contest 17 September 2009, By JOHN ANTCZAK , Associated Press first privately developed manned rocket to reach space and prototype for a fleet of space tourism rockets. The remotely controlled Xombie is competing for second-place in the first level of the competition, which requires a flight from one pad to another and back within two hours and 15 minutes. Each flight must rise 164 feet and last 90 seconds. How close the rocket lands to the pad's center is also a factor. Level 2 requires 180-second flights and a rocky moonlike landing pad. The energy used is equivalent to that needed for a real descent from lunar orbit to the surface of the moon and a return This image provided by the X Prize Foundation shows a to orbit, said Peter Diamandis, founder of the X rocket built by Armadillo Aerospace fueling up in the Prize. Northrop Grumman Lunar Lander Challenge at Caddo Mills, Texas, Saturday Sept. 12, 2009. The rocket qualified for a $1 million prize with flights from a launch The Xombie made one 93-second flight and landed pad to a landing pad with a simulated lunar surface and within 8 inches of the pad's center, according to then back to the starting point. The craft had to rise to a Tom Dietz, a competition spokesman. certain height and stay aloft for 180 seconds on each flight. The challenge is funded by NASA and presented David Masten, president and chief executive of by the X Prize Foundation.(AP Photo/X Prize Masten Space Systems, said the first leg of the Foundation, Willaim Pomerantz) flight was perfect but an internal engine leak was detected during an inspection before the return flight. -

513691 Journal of Space Law 35.1.Ps
JOURNAL OF SPACE LAW VOLUME 35, NUMBER 1 Spring 2009 1 JOURNAL OF SPACE LAW UNIVERSITY OF MISSISSIPPI SCHOOL OF LAW A JOURNAL DEVOTED TO SPACE LAW AND THE LEGAL PROBLEMS ARISING OUT OF HUMAN ACTIVITIES IN OUTER SPACE. VOLUME 35 SPRING 2009 NUMBER 1 Editor-in-Chief Professor Joanne Irene Gabrynowicz, J.D. Executive Editor Jacqueline Etil Serrao, J.D., LL.M. Articles Editors Business Manager P.J. Blount Michelle Aten Jason A. Crook Michael S. Dodge Senior Staff Assistant Charley Foster Melissa Wilson Gretchen Harris Brad Laney Eric McAdamis Luke Neder Founder, Dr. Stephen Gorove (1917-2001) All correspondence with reference to this publication should be directed to the JOURNAL OF SPACE LAW, P.O. Box 1848, University of Mississippi School of Law, University, Mississippi 38677; [email protected]; tel: +1.662.915.6857, or fax: +1.662.915.6921. JOURNAL OF SPACE LAW. The subscription rate for 2009 is $100 U.S. for U.S. domestic/individual; $120 U.S. for U.S. domestic/organization; $105 U.S. for non-U.S./individual; $125 U.S. for non-U.S./organization. Single issues may be ordered at $70 per issue. For non-U.S. airmail, add $20 U.S. Please see subscription page at the back of this volume. Copyright © Journal of Space Law 2009. Suggested abbreviation: J. SPACE L. ISSN: 0095-7577 JOURNAL OF SPACE LAW UNIVERSITY OF MISSISSIPPI SCHOOL OF LAW A JOURNAL DEVOTED TO SPACE LAW AND THE LEGAL PROBLEMS ARISING OUT OF HUMAN ACTIVITIES IN OUTER SPACE. VOLUME 35 SPRING 2009 NUMBER 1 CONTENTS Foreword .............................................. -
Exploring Space
EXPLORING SPACE: Opening New Frontiers Past, Present, and Future Space Launch Activities at Cape Canaveral Air Force Station and NASA’s John F. Kennedy Space Center EXPLORING SPACE: OPENING NEW FRONTIERS Dr. Al Koller COPYRIGHT © 2016, A. KOLLER, JR. All rights reserved. No part of this book may be reproduced without the written consent of the copyright holder Library of Congress Control Number: 2016917577 ISBN: 978-0-9668570-1-6 e3 Company Titusville, Florida http://www.e3company.com 0 TABLE OF CONTENTS Page Foreword …………………………………………………………………………2 Dedications …………………………………………………………………...…3 A Place of Canes and Reeds……………………………………………….…4 Cape Canaveral and The Eastern Range………………………………...…7 Early Missile Launches ...……………………………………………….....9-17 Explorer 1 – First Satellite …………………….……………………………...18 First Seven Astronauts ………………………………………………….……20 Mercury Program …………………………………………………….……23-27 Gemini Program ……………………………………………..….…………….28 Air Force Titan Program …………………………………………………..29-30 Apollo Program …………………………………………………………....31-35 Skylab Program ……………………………………………………………….35 Space Shuttle Program …………………………………………………..36-40 Evolved Expendable Launch Program ……………………………………..41 Constellation Program ………………………………………………………..42 International Space Station ………………………………...………………..42 Cape Canaveral Spaceport Today………………………..…………………43 ULA – Atlas V, Delta IV ………………………………………………………44 Boeing X-37B …………………………………………………………………45 SpaceX Falcon 1, Falcon 9, Dragon Capsule .………….........................46 Boeing CST-100 Starliner …………………………………………………...47 Sierra