Leveling Magnetic Resonance Imaging Room Floor Using Scraping Robot
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Polyurethane Concrete Leveling
POLYURETHANE CONCRETE LEVELING EARTH SHORING GROUND IMPROVEMENT DEEP FOUNDATIONS VIBRATORY STONE COLUMNS MICROPILES GROUTING helitechccd.com | 800-246-9721 COMMERCIAL CONCRETE LEVELING SOLUTION Helitech® Civil Construction Division utilizes a state-of-the art technology to raise and level your existing concrete. Instead of breaking up, removing, and repouring the entire concrete slab, Helitech® CCD inserts a special Polyurethane combination below the surface to “lift” the slab back to its original height. STEP 1 STEP 2 STEP 3 FINISHED PROCESS After installing port holes in the existing concrete (1), Helitech® CCD injects a Polyurethane material into ports using a special hydraulic system (2). The Polyurethane material expands to raise the surface of the slab to the desired height. The core holes are then filled with Portland cement (3) and repaired to produce a smooth, level surface. BENEFITS POLYURETHANE LEVELING By utilizing the Polyurethane Concrete Leveling method, Helitech® CCD has the ability to 2-5 lbs per Cubic Foot raise the given slab without adding the extra weight of the concrete to an already settling soil. Compared to Traditional Mudjacking which adds an additional 100 pounds per VS cubic foot, the Polyurethane Material is only 2-5 pounds per cubic foot depending on TRADITIONAL MUDJACKING the density being used. Polyurethane Concrete Leveling from Helitech® CCD is a green 100 lbs per Cubic Foot solution as the poly foam used is made from recycled material. USES Common applications include: roadways, undersealing, parking lots, factory and warehouse floors, interior commerical building slabs, airport runways, spillways, bridge approaches, and more. EARTH SHORING GROUND IMPROVEMENT DEEP FOUNDATIONS VIBRATORY STONE COLUMNS MICROPILES GROUTING helitechccd.com | 800-246-9721 | Fax: 618-397-3066 © Helitech CCD 2014 PMJ_CCD. -
POLYURETHANE CONCRETE LEVELING Less Invasive, State-Of-The-Art Technology
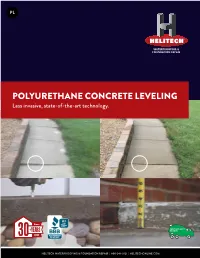
PL WATERPROOFING & FOUNDATION REPAIR POLYURETHANE CONCRETE LEVELING Less invasive, state-of-the-art technology. HELITECH WATERPROOFING & FOUNDATION REPAIR | 800-246-9721 | HELITECHONLINE.COM WHAT IS CONCRETE LEVELING? Concrete Leveling, often referred to as “mud-jacking”, has been used by Helitech for over 30 years to raise and level settled concrete for a fraction of the cost of replacement. As technology has advanced, Helitech continues to lead the industry by embracing the innovative and less invasive Polyurethane or “Poly-jacking” Leveling System. Helitech is the ONLY contractor that offers both traditional mud-jacking and poly-jacking for all your concrete leveling needs. STEP 1 STEP 2 STEP 3 FINISHED! POLYURETHANE LEVELING PROCESS DON’T REPLACE IT, RAISE IT!® After installing small, 3/8” port holes in the existing concrete (1), Helitech® Residential: Sidewalks, Porches, Patios, Garage injects a lightweight Polyurethane material into ports using a special hydraulic floors, Basement floors, and Swimming pool aprons. system (2). The Polyurethane material expands to raise and lift the concrete slab Commercial & Industrial applications: Roadways, to the desired height. The small core holes are then filled with Portland cement Undersealing, Warehouse floors, Airport Runways, (3) to produce a smooth, level surface. and Bridge approaches. POLYURETHANE LEVELING TRADITIONAL MUDJACKING Holes are larger and require more to be installed. Smaller and fewer holes required. OVER 100,000 HOMES HEALED, 5 DECADES STRONG HELITECHONLINE.COM | 800-246-9721 Proudly serving Central, Eastern, and Southern Illinois; Central, Southeast, and Southern Missouri; Greater St. Louis; Quad Cities; Southeastern Iowa, and Western Kentucky Serviced by our o ces located at 8251 Bunkum Rd, Caseyville, IL 62232 4301 81st St Ave W, Rock Island, IL 61201; 1910 5th St, Lincoln, IL 62656 1616 Adams Dr, Marion, IL 62959; 2692 State Rd M, Kingdom City, MO 65262 WATERPROOFING & 625 Feise Rd, O’Fallon, MO, 63368 FOUNDATION REPAIR All products used by Helitech are proudly made in the U.S.A. -
02110 Subgrade Stabilization (Class C Fly Ash) 02110-1 A
02110 SUBGRADE STABILIZATION (CLASS C FLY ASH) 02110-1 A. Description 1. This work shall consist of construction one or more layers of a mixture of soil. Type C Fly Ash, and water in accordance with these specifications and in reasonably close conformity with the lines, grades, thicknesses, and typical cross sections shown on the plans and specifications. B. Fly Ash Materials 1. Materials shall conform to the requirements specified in the following sections of the latest specifications: Type C Fly Ash - ASTM C 593 and ASTM C 311 Water - AASHTO T 26 C. Construction Requirements 1. Preparation and Materials - The prepared subgrade shall be scarified to the depth and width required for the subgrade stabilization. The material thus obtained shall be pulverized until the material is substantially free of lumps which are over 1 inch in diameter. The depth of scarification shall be carefully controlled and blading operations conducted in a manner to prevent the surface of the subgrade below the scarified material from becoming disturbed. 2. Application of Fly Ash: a. Dry Mix - Fly Ash in dry form may be used provided that its use if allowed under the local jurisdiction. Care must be taken to prevent blowing and loss of materials. The methods of spreading must be such to provide a uniform mixture. b. The weight of Fly Ash shall be 15 percent by weight (unless noted otherwise on the plans) assuming a soil dry density of 115 pounds per cubic foot. 3. Addition of Water - Water as needed shall be added during mixing operation. The method of application must be rapid and uniform. -

City of Abilene Item 423 Retaining Wall
RETAINING WALL ITEM 423 CITY OF ABILENE ITEM 423 RETAINING WALL 423.1 DESCRIPTION. This Item shall govern for furnishing the materials and constructing retaining walls as shown on the Plans and required by this Item. Spread footing retaining walls shall consist of reinforced concrete footings and reinforced concrete stems as shown on the Plans. Mechanically Stabilized Earth (MSE) walls shall consist of a volume of select backfill with tensile reinforcing elements distributed throughout and a concrete facing. Other types of retaining walls shall be as shown on the Plans. 423.2 MATERIALS. All materials shall conform to the pertinent requirements of the following Items: Item 420, “Concrete Structures” Item 421, “Portland Cement Concrete” Item 440, “Reinforcing Steel” TxDOT Item 445, “Galvanizing” TxDOT Item 458, “Waterproofing for Structures” TxDOT Item 556, “Pipe Underdrains” Unless otherwise shown on the Plans, concrete for retaining walls shall conform to the following: Cast-in-Place, Reinforced Class “C” Cast-in-Place, Non-reinforced Class “A” Precast Class “H”, f'c=4000 psi Filter fabric material shall conform to TxDOT Departmental Material Specification D-9-6200. Materials for earth reinforcements shall be as shown on the Plans. All steel elements in contact with soil shall be galvanized or epoxy coated. Epoxy coating shall be in accordance with Item 440, “Reinforcing Steel”, except that the coating thickness shall be a minimum of 18 mils. Joint fillers, pads, waterstops, and other incidental materials shall be as shown on the Plans, or approved by the Engineer. BACKFILL MATERIAL. (1) Backfill for spread footing retaining walls shall be in accordance with Item 132, “Embankment”, Type B, unless otherwise shown on the Plans. -

2001 Supplemental Specifications
WEST VIRGINIA DIVISION OF HIGHWAYS SUPPLEMENTAL SPECIFICATIONS TO ACCOMPANY THE 2000 EDITION OF THE STANDARD SPECIFICATIONS ISSUED JULY 1, 2001 TABLE OF CONTENTS SECTION DESCRIPTION PAGE # DIVISION 100 105.2 PLANS AND WORKING DRAWINGS 1 107.26 NOTIFICATION OF ABATEMENT, DEMOLITION OR RENOVATION 1 107.27 CONSTRUCTION ACCESS AND ENVIRONMENTAL 2 PERMITS: DIVISION 200 202 BUILDING DEMOLITION, WELL AND SEPTIC 5 TANK ABANDONMENT 204.4 METHOD OF MEASUREMENT 10 DIVISION 300 307 CRUSHED AGGREGATE BASE COURSE 11 DIVISION 400 401 HOT-MIX ASPHALT BASE, WEARING, 19 AND PATCHING-AND-LEVELING COURSES 402 HOT-MIX ASPHALT SKID RESISTANT PAVEMENT 41 408.6 CLEANING AND SWEEPING 42 DIVISION 500 501.4.1 TEST METHODS 43 506 CONCRETE PAVEMENT REPAIR 44 SECTION DESCRIPTION PAGE # DIVISION 600 601.1 DESCRIPTION 47 601.3 PROPORTIONING 47 601.4.1 SAMPLING AND TESTING METHODS 49 601.4.2 CONTRACTOR'S QUALITY CONTROL 49 601.8 FORMS 49 601.11.5 FINISHING CONCRETE DECKS FOR THE PLACEMENT OF SPECIALIZED OVERLAY 55 601.14 METHOD OF MEASUREMENT 56 601.15 BASIS OF PAYMENT 56 601.16 PAY ITEMS 56 602.9 METHOD OF MEASUREMENT 57 604.14 PAY ITEMS 58 607.1 DESCRIPTION 60 609.2 MATERIALS 60 615 STEEL STRUCTURES 60 616 PILING 61 625 DRILLED CAISSON FOUNDATIONS 68 626 RETAINING WALL SYSTEMS 85 636 MAINTAINING TRAFFIC 105 637.4 METHOD OF MEASUREMENT 109 640 FIELD OFFICE AND STORAGE BUILDING 109 642 TEMPORARY POLLUTION CONTROL 115 651.2 MATERIALS 115 653.9 PAY ITEMS 116 654.17 PAY ITEMS 116 656.8 PAY ITEMS 116 657 ROADSIDE SIGN SUPPORTS 116 658 OVERHEAD SIGN STRUCTURES 117 662 ROADWAY -

Resurfacing with Portland Cement Concrete
a NATIONAL COOPERATIVE HIGHWAY RESEARCH PROGRAM SYNTHESIS OF HIGHWAY PRACTICE 99 RESURFACING WITH PORTLAND CEMENT CONCRETE S a TRANSPORTATION RESEARCH BOARD NATIONAL RESEARCH COUNCIL S TRANSPORTATION RESEARCH BOARD EXECUTIVE COMMITTEE 1982 Officers Chairman DARRELL V MANNING, Director, Idaho Transportation Department Vice Chairman LAWRENCE D. DAHMS, Executive Director. Metropolitan Transportation Commission. San Francisco Bar Area Secretary THOMAS B. DEEN, Executive Director, Transportation Research Board Members RAY A. BARNHART, Federal High way Administrator. U.S. Department of Transportation (cx officio) FRANCIS B. FRANCOIS, Executive Director. American Assc,ciatic,n of State Highway and Transportation Officials (cx officio) WILLIAM J. HARRIS, JR., Vice President for Research and Test Department, Association of American Railroads (cx officio) J. LYNN HELMS, Federal Aviatic,n Administrator. U.S. Department of Transportation (cx officio) THOMAS D. LARSON, Secretary, Pennsylvania Department of Transportation (cx officio, Past Chairman (1981) RAYMOND A. PECK, JR., National Highway Traffic Safety Administrator, U.S. Department of Transportation (cx officio) ARTHUR E. TEELE, JR., Urban Mass Transportation Administratc,r, U.S. Department of Transportation (cx officio) CHARLEY V. WOOTAN, Director, Texas Transportation Institute, Texas A&M University (cx officio, Past Chairman 1980) GEORGE J. BEAN, Director of Aviation. Hillsborough Count (Florida) Aviation Authority JOHN R. BORCHERT, Professor, Department of Geography, University of Minnesc,ta RICHARD P. BRAUN, Commissioner, Minnesota Department of Transportation ARTHUR J. BRUEN, JR., Vice President, Cc,ntinental illinois Natic,na! Bank and Trust Company of c'hicago JOSEPH M. CLAPP, Senior Vice President, Roadway Express, Inc. ALAN G. DUSTIN, President and Chief Executive Officer, Boston and Maine Cc,rpc,ration ROBERT E. -

Evaluating Industrialization Rate in Construction: a Quantification Model
AN ABSTRACT OF THE DISSERTATION OF Ding Liu for the degree of Doctor of Philosophy in Civil Engineering presented on May 15, 2019. Title: Evaluating Industrialization Rate in Construction: A Quantification Model Abstract approved: ______________________________________________________ John A. Gambatese The concept of construction industrialization, first raised in the 1960s, refers to the transfer of on-site construction work to an off-site factory to improve quality and reduce cost, time, and safety issues. In some countries, industrialization of construction projects is highly recommended and promoted by governments and local construction institutions to minimize waste and pollution. The industrialization rate in construction is an important factor that is widely accepted to evaluate the level of industrialization in the industry. It is believed that construction industrialization rate (CIR) is associated with construction performance in terms of cost, schedule, safety, quality, and other measures. The construction industry currently utilizes volume of concrete use to evaluate the CIR, which is not necessarily accurate and convincible. No other formal method or model is available to objectively calculate the rate of construction industrialization. The author sets this knowledge gap as the point of departure and aims to develop a formal model for quantifying the CIR value of projects. To combine all of the units associated with the various construction operations and resources on a project, the researcher utilizes energy expenditure as a means for determining the percentages of human work and machine work. All activities and tasks could be measured with energy expenditure; energy is the most commonly-used unit that could be applied to all construction tasks, including both worker activities and machine activities. -

548-020 1Of1 R
NOTES Concrete Barrier DESIGN CRITERIA: 1. Design is based on the assumption that the material contained within the reinforced soil volume, methods of construction and quality of prefabricated materials are in accordance with Specification Section 548 and Chapter 3 Top of Junction Slab Shoulder or of the FDOT Structures Design Guidelines. Coping Elevation Roadway Pavement SOIL PARAMETERS: 1. See Wall Control Drawings for soil characteristics of foundation material to be used in the design of the wall system. Concrete Coping 2. The Contractor will provide soil design parameters for backfill material based 10'-0" Min. C-I-P Coping 12'-0" Min. Precast Coping/Concrete Barrier on the actual soil characteristics utilized at the site. (Index 521-610, 521-620) Soil Reinforcement (Typ.) MATERIALS: 12" 2'-0" 6" 1. See Specification Section 548 for material requirements. Coping Top of Coping Surface treatment when Transition required (See Construction CONSTRUCTION: Note 9) Limits of 1. Walls will be constructed in accordance with Specification Section 548 and Soil Volume the Wall Company's instructions. 2. For location and alignment of retaining walls, see Wall Control Drawings. t 1'-0" Min. g g s See Plans " " P n n a - 0 3 3. If required, locate manholes and drop inlets as shown on wall elevations. i i c I - - p p ' ' - e o o 2 2 4. Refer to Wall Control Drawings of individual walls for minimum reinforcement r C C C Proposed Final strip/mesh length, factored bearing resistance's, minimum wall embedment P Ground Line and anticipated long term and differential settlements. -

Mechanically Stabilized Earth Wall
MECHANICALLY STABILIZED EARTH WALL INSPECTOR'S HANDBOOK Only VOID Information Historical For by: PAUL D. PASSE, P.E., CPM STATE GEOTECHNICAL ENGINEER Tallahassee, Florida September 14, 2000 TABLE OF CONTENTS TABLE OF CONTENTS.............................................. i FIGURES....................................................... iv FIGURES....................................................... iv TABLES......................................................... v MECHANICALLY STABILIZED EARTH (MSE) WALLS...................... 1 INTRODUCTION ................................................. 1 TERMS ........................................................ 1 Coping ...................................................... 2 Extensible Reinforcement .................................... 2 Filter Fabric ............................................... 2 Inextensible Reinforcement .................................. 2 Leveling Pad ................................................Only 2 Original Ground ............................................. 2 Random Backfill ............................................. 2 Select Backfill ............................................. 2 Soil Reinforcement .......................................... 2 Spacers ..................................................... 2 Wall Facing Panel ........................................... 3 Wall/Reinforcement Connection ............................... 3 Water ....................................................... 3 Wooden Wedges .............................................. -

CASE STUDY Configurations
Port of Seattle - Terminal #5 Seattle, Washington The Port of Seattle faced redevelopment and the undertaking of Project: Port of Seattle Terminal #5 a massive new automated freight facility to strengthen efforts and SW Harbor Reclamation to compete globally. The waterfront area under consideration Location: Seattle, Washington had previously been used for heavy industrial and toxic waste storage. The design concept was to mix a new heavy industry Owner: Port of Seattle cargo facility and visitor areas including restaurants and Keystone Product: KeySystem I, Compac Units & observation overlooks, in a highly controversial, sentimental KeySteel soil reinforcement and valuable piece of Seattle shoreline. Licensed Manufacturer: Keystone Pacific Northwest To accomplish this project, architectured retaining walls were Beaverton, Oregon proposed to elevate the pedestrian walkways, in some cases up to 28' (8.54 m) high, to separate visitors, joggers and bicyclists Total Wall Area: 22,500 sq.ft. (2,084 m2) from the heavy equipment operation areas. Meandering General Contractor: M.A. Segale Construction pathways, with lush vegetation along with safety fences and Tukwila, Washington railings, would allow safe passage of visitors to ramps, bridges and observation points. With the raised elevation, visitors Wall Contractor: KRC Construction would have a great view of harbor shipping, cargo operations Issaquah, Washington and the world famous Seattle skyline across the harbor. Civil Engineers: KPFF Engineers Seattle, Washington A collaboration of project designers KPFF Engineers, Arai Jackson Architects and Hough, Beck and Baird Landscape Architect: Arai Jackson Architects originally designed the project with cast-in-place Seattle, Washington concrete or pre-cast concrete panel options. M.A. -

Self-Leveling Underlayment and Bonded Topping Two-Course Slab Construction
Self-Leveling Underlayment and Bonded Topping Two-Course Slab Construction March 2011 First Printing – March 2011 Self-Leveling Underlayment and Bonded Topping Two-Course Slab Construction© Copyright by Supercap, Port Washington, NY. All rights reserved. This material may not be reproduced or copied, in whole or part, in any printed, mechanical, electronic, film, or other distribution and storage media, without the written consent of PTI. The Technical Director responsible for this report and standard has strived to avoid ambiguities, omissions, and errors in this document. In spite of this effort, the users of this document occasionally find information or requirements that may be subject to more than one interpretation or may be incomplete or incorrect. Users who have suggestions for the improvement of this document are requested to contact Supercap. Proper use of this document includes periodically checking for errata at www.supercap.us.com for the most up-to-date revision. Supercap documents are intended for the use of individuals who are competent to evaluate the significance and limitations of its content and recommendations and who will accept responsibility for the application of the material it contains. Individuals who use this publication in any way assume all risk and accept total responsibility for the application and use of the information. All information in this document is provided “as is” without warranty of any kind, either express or implied, including but not limited to, the implied warranties of merchantability, fitness for a particular purpose or non-infringement. Supercap and its employees disclaim liability for damages of any kind, including special, indirect, incidental, or consequential damages, including without limitation, lost revenues or lost profits, which may result from the use of this document. -

Experimental Investigation on Bendable Concrete Using Natural and Artificial Fibres (Jute and Nylon)
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 05 Issue: 04 | Apr-2018 www.irjet.net p-ISSN: 2395-0072 Experimental Investigation on Bendable Concrete Using Natural and Artificial Fibres (Jute and Nylon) Brinila Bright B N(1),Beer Mohamed Sareef S H(2), Basith P A(3),Harish Priyadharshan T(4) (1)Assistant Professor, Department of Civil Engineering, Sethu Institute of Technology, Viruthunagar-626115, Tamil Nadu, India. (2), (3), (4) Final Year Students, Department of Civil Engineering, Sethu Institute of Technology, Viruthunagar-626115, Tamil Nadu, India. ---------------------------------------------------------------------***--------------------------------------------------------------------- ABSTRACT-Engineering cementitious composite (ECC), admixtures along with the basic constituents (i.e,) cement, also called strain hardening cement-based composites (SHCC) fine aggregate and water. No coarse aggregate is used in ECC, or more popularly as bendable concrete. It is special type of to avoid brittle failure. PVA fibers are known for their low concrete that can take the bending stresses. It consists of modulus of elasticity, ductility, tensile strength and bonding special type of materials that makes it flexible. Normal strength, whereas, Steel fiber increases the flexural, impact concrete is brittle in nature while ECC is ductile in nature due and fatigue strength of composite. Hence a combination of to this property. It has wide applications and wide future scope these two fibers is used in this work. Fly ash is a material in various fields. Fly ash is also known as pulverized fuel ash. It that was proved to be a good replacement for cement, from is a fine powder which is a byproduct from burning pulverized the previous studies.