Systems Science for Physical Geometric Algorithms Final Report for EIA-9802068
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hany Farid [email protected]
Hany Farid [email protected] APPOINTMENTS University of California, Berkeley 2019 – Professor, Electrical Engineering and Computer Sciences (50%) Professor, School of Information (50%) Member, Berkeley Artificial Intelligence Lab Member, Center for Innovation in Vision and Optics Member, Vision Science Program Dartmouth College, Department of Computer Science 1999 – 2019 Albert Bradley 1915 Third Century Professor 2016 – 2019 Professor 2011 – 2016 William H. Neukom 1964 Distinguished Professor of Computational Science 2008 – 2011 David T. McLaughlin Distinguished Professor of Computer Science 2007 – 2008 Professor 2006 – 2007 Associate Professor 2004 – 2006 Assistant Professor 1999 – 2004 Dartmouth College, Tuck School of Business 2016 – 2019 Adjunct Professor of Business Administration Dartmouth College, Neukom Institute for Computational Science 2008 – 2011 Director PROFESSIONAL AI Foundation 2019 – present Board of Directors & Global AI Council Center for Investigative Reporting 2020 – present Advisory Committee Counter Extremism Project 2016 – present Senior Advisor Cyber Civil Rights Initiative 2019 – present Advisory Committee Fourandsix Technologies, Inc. 2011 – 2018 Chief Technology Officer & Co-founder Human Rights Center, University of California, Berkeley, School of Law 2019 – present Advisory Board Office of the Prosecutor, International Criminal Court 2018 – present Technology Advisory Board TikTok 2020 – present Content Advisory Council Truepic, Inc. 2018 – present Senior Advisor & Board of Advisors EDUCATION Massachusetts Institute of Technology 1997 – 1999 Postdoctoral Fellow, Brain and Cognitive Sciences (advisor: Ted Adelson) University of Pennsylvania 1993 – 1997 Ph.D., Computer Science (advisor: Eero Simoncelli) State University of New York at Albany 1990 – 1992 M.S., Computer Science University of Rochester 1984 – 1988 B.S., Computer Science with Applied Mathematics AWARDS National Academy of Inventors (NAI), Fellow, 2016 John Simon Guggenheim Fellowship, 2006 Alfred P. -

Physics Department Newsletter February 2015
PHYSICS DEPARTMENT NEWSLETTER FEBRUARY 2015 ON THE MOVE Physics student combines science and dance to teach new concepts Scientific exploration is growing by leaps, in the university’s 2014 SpringDance, and also the molecules — or dancers — reacted in bounds and pirouettes thanks to a Kansas acted as a liaison between the two disciplines. certain ways. “I could see them absorbing it,” State University undergraduate student. “I don’t see either field as deeply as the Phillips said. “I’ve heard them tell each other, Daniel Phillips, senior in physics and nuclear experts, but I know enough about each that ‘we turn this way because,’ and explain the engineering, Kaiser, Oregon, is using his I can guide them toward the middle,” Phillips science correctly. If you can teach people dual interests in physics and dance to help said. The second act was polished before the science in a way that relates to their interests, performers discover scientific concepts. “The 2014 WinterDance performance. Phillips has it’s a powerful tool.” Phillips added that one personality of a performer is not necessarily transitioned from a performer to a rehearsal of the best ways in which to learn is to teach conducive to sitting in a lecture hall and assistant, helping dancers with techniques. the subject to someone else. In his research, getting talked at about physics,” Phillips said. Additionally, Phillips has begun his own it’s twofold — not only is he deepening his “I wanted to see if there was a viable way to research using the ballet as a method to teach physics knowledge by teaching the dancers, teach science through performance art to physics to the dancers. -

(Literary) Special Effect: (Inter)Mediality in the Contemporary US-American Novel and the Digital Age
The (Literary) Special Effect: (Inter)Mediality in the Contemporary US-American Novel and the Digital Age Dissertation zur Erlangung des philosophischen Doktorgrades an der Philosophischen Fakultät der Georg-August-Universität Göttingen vorgelegt von Bogna Kazur aus Lodz, Polen Göttingen 2018 Contents 1 Introduction ......................................................................................................................... 3 2 The Question of Medium Specificity in the Digital Age .................................................. 29 3 House of Leaves (2000) and the Uncanny Dawn of the Digital........................................ 39 3.1 Digital Paranoia: Arriving on Ash Tree Lane ........................................................... 39 3.2 Writing about House of Leaves ................................................................................. 43 3.3 Intermedial Overabundance: Taming House of Leaves ............................................. 49 3.4 An “Explicit” Approach to the Digital Age ............................................................... 54 3.5 What Kind of Movie is THE NAVIDSON RECORD? ..................................................... 68 4 In the Midst of the Post-Cinematic Age: Marisha Pessl’s Night Film (2013) .................. 88 4.1 Meant for Adaptation: Night Film and the Fallacy of First Impressions ................... 88 4.2 The Post-Cinematic Reception of Film ..................................................................... 96 4.3 The Last Enigma: Cordova’s Underworld .............................................................. -
Attribute-Based, Usefully Secure Email
Dartmouth College Dartmouth Digital Commons Dartmouth College Ph.D Dissertations Theses and Dissertations 8-1-2008 Attribute-Based, Usefully Secure Email Christopher P. Masone Dartmouth College Follow this and additional works at: https://digitalcommons.dartmouth.edu/dissertations Part of the Computer Sciences Commons Recommended Citation Masone, Christopher P., "Attribute-Based, Usefully Secure Email" (2008). Dartmouth College Ph.D Dissertations. 26. https://digitalcommons.dartmouth.edu/dissertations/26 This Thesis (Ph.D.) is brought to you for free and open access by the Theses and Dissertations at Dartmouth Digital Commons. It has been accepted for inclusion in Dartmouth College Ph.D Dissertations by an authorized administrator of Dartmouth Digital Commons. For more information, please contact [email protected]. Attribute-Based, Usefully Secure Email A Thesis Submitted to the Faculty in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Computer Science by Christopher P. Masone DARTMOUTH COLLEGE Hanover, New Hampshire August, 2008 Examining Committee: (chair) Sean W. Smith, Ph.D. David F. Kotz, Ph.D. Christopher J. Bailey-Kellogg, Ph.D. Denise L. Anthony, Ph.D. M. Angela Sasse, Ph.D. Charles K. Barlowe, PhD Dean of Graduate Studies Abstract A secure system that cannot be used by real users to secure real-world processes is not really secure at all. While many believe that usability and security are diametrically opposed, a growing body of research from the field of Human-Computer Interaction and Security (HCISEC) refutes this assumption. All researchers in this field agree that focusing on aligning usability and security goals can enable the design of systems that will be more secure under actual usage. -

College of Arts & Sciences
COLLEGE OF ARTS & SCIENCES ACHIEVEMENTS AND HIGHLIGHTS September 2014 Summary Sheet Traci Brimhall, English, reading of 6 new poems at Poet Lore’s 125th Anniversary Reading at the Folger Shakespeare Library in Washington D.C., 15 Sept. 2014. Link: http://www.folger.edu/wosummary.cfm?woid=951 Slawomir Dobrzanski, School of Music, Theatre, and Dance, presented a Lecture-recital “Chopin before Chopin: Inspirations and Influences” at the Polish Academy of Sciences, Paris Branch, Paris, France where he also performed a piano recital at the Polish Library in Paris. Dr. Dobrzanski also performed a piano recital on the “Great Spaces” Recital Series at Grace Cathedral in Topeka, Kansas. Bimal Paul was named Head of Delegation for the 10-member delegation from the Association of American Geographers who will attend the Twentieth session of the Conference of the Parties (COP 20) of the United Nations Framework Convention on Climate Change (UNFCCC) in Lima, Peru between 1 and 12 December, 2014. Bell, Sam R and Michael Flynn, Political Science, (with Colin Barry, Univ of Oklahoma; K. Chad Clay, Univ. of Georgia; and Amanda Murdie, Univ of Missouri) Accepted and Forthcoming. “Choosing the Best House in a Bad Neighborhood: Location Strategies of Human Rights INGOs in the Non-Western World.” International Studies Quarterly. 58 (1): 187-198. ISQ is ranked 10th among all political science journals (Giles and Garrand 2007; Garrand et al 2009). ISQ is the flagship journal of the International Studies Association, the foremost association for political science scholars in the subfield of international relations. No K-State political science professor had been published in this prestigious outlet over the first forty years of the department’s history, from 1965 to 2005. -
Building Realistic Forensic Corpora to Enable Undergraduate Education and Research
Building Realistic Forensic Corpora to Enable Undergraduate Education and Research Simson L. Garfinkel Associate Professor, Naval Postgraduate School July 27, 2010 — 9:00am - 9:45am http://digitalcorpora.org/ NSF Award DUE-0919593: "Creating Realistic Forensic Corpora for Undergraduate Education and Research" 1 NPS is the Navyʼs Research University. Location: !Monterey, CA Campus Size: !627 acres Students: 1500 . US Military (All 5 services) . US Civilian (Scholarship for Service & SMART) . Foreign Military (30 countries) Digital Evaluation and Exploitation: . Research computer forensics. Develop “corpora” for use in research & education. Identify limitations of current tools & opportunities for improvement. http://domex.nps.edu/deep/ “The views expressed in this presentation are those of the author and do not necessarily reflect those of the Department of Defense or the US Government.” 2 Digital Forensics Research is at a turning point. Yesterdayʼs work was primarily reverse engineering. Key technical challenges: . Evidence preservation. File recovery (file system support); Undeleting files . Encryption cracking. Keyword search. 3 Digital Forensics Research is at a turning point. Todayʼs work is increasingly scientific. Evidence Reconstruction . Files (fragment recovery carving) . Timelines (visualization) Clustering and data mining Social network analysis Same Community College Drives #74 x #77 25 CCNS in common Same Car Dealership Sense-making Drives #179 & #206 Drives #171 & #172 13 CCNS 13 CCNS in common in common Same Medical Center 4 Science requires the scientific process. Hallmarks of Science: . Controlled and repeatable experiments. No privileged observers. Why repeat some other scientist"s experiment? . Validate that an algorithm is properly implemented. Determine if your new algorithm is better than someone elseʼs old one. -
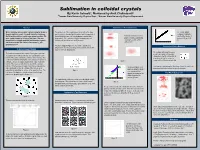
Sublimation in Colloidal Crystals by Kevin Schoelz1, Mentored by Amit Chakrabarti2 1Truman State University Physics Dept., 2Kansas State University Physics Department
Sublimation in colloidal crystals By Kevin Schoelz1, Mentored by Amit Chakrabarti2 1Truman State University Physics Dept., 2Kansas State University Physics Department Abstract Sublimation in Three Dimensions 4 y = 0.6361x + 1.0062 R2 = 0.9722 We are studying colloid polymer systems using the Asakura- The parameters of the simulatjon are xi, the ratio of the large 3.5 The crystal exhibits 3 scaling as it sublimates Oosawa depletion model. For small interaction distances, particle radius to the small particle radius, and the magnitude of m Nm vs t Linear (Nm vs t) To the left and below are four Log(N the AO model exhibits a crystal to gas phase transition. We the well depth in terms of kT (the boltzmann constant and a 2.5 such that the number of used crystals formed by colloids of two sizes. The were temperature). The crystals used in this simulation were all graphs showing a sublimating monomers N goes like 2 m then placed into a higher potential field where the began to formed under the influence of a 4kT potential. crystal at t=0, t=50, t=5000 t2/3. 1.5 1.5 2 2.5 3 3.5 4 4.5 5 and t=10000. Log(t) sublimate, such that the number of monomers Nm was proportional to t2/3. The phase diagram(Figure 3) relies on three parameters: Conclusions/Future Research temperature, the interaction range of the potential and volume Asakura-Oosawa Potential fraction of the colloidal particles. The scaling relationship from above The Asakura-Oosawa model consists of two types of particles. -
Department of Computer Science Activity 1998-2004
Dartmouth College Dartmouth Digital Commons Computer Science Technical Reports Computer Science 3-20-2005 Department of Computer Science Activity 1998-2004 David Kotz Dartmouth College Follow this and additional works at: https://digitalcommons.dartmouth.edu/cs_tr Part of the Computer Sciences Commons Dartmouth Digital Commons Citation Kotz, David, "Department of Computer Science Activity 1998-2004" (2005). Computer Science Technical Report TR2005-534. https://digitalcommons.dartmouth.edu/cs_tr/267 This Technical Report is brought to you for free and open access by the Computer Science at Dartmouth Digital Commons. It has been accepted for inclusion in Computer Science Technical Reports by an authorized administrator of Dartmouth Digital Commons. For more information, please contact [email protected]. Department of Computer Science Activity 1998–2004 David Kotz (editor) [email protected] Technical Report TR2005-534 Department of Computer Science, Dartmouth College http://www.cs.dartmouth.edu March 20, 2005 1 Contents 1 Introduction 1 2 Courses 2 3 Information Retrieval (Javed Aslam, Daniela Rus) 4 3.1 Activities and Findings ....................................... 4 3.1.1 Mobile agents for information retrieval. .......................... 4 3.1.2 Automatic information organization ............................ 4 3.1.3 Metasearch ......................................... 5 3.1.4 Metasearch, Pooling, and System Evaluation ....................... 6 3.2 Products ............................................... 7 3.3 -

Sixth Microgravity Fluid Physics and Transport Phenomena Conference Abstracts
NASA/TM--2002-211211 Sixth Microgravity Fluid Physics and Transport Phenomena Conference Abstracts August 2002 The NASA STI Program Office... in Profile Since its founding, NASA has been dedicated to CONFERENCE PUBLICATION. Collected the advancement of aeronautics and space papers from scientific and technical science. The NASA Scientific and Technical conferences, symposia, seminars, or other Information (STI) Program Office plays a key part meetings sponsored or cosponsored by in helping NASA maintain this important role. NASA. The NASA STI Program Office is operated by SPECIAL PUBLICATION. Scientific, Langley Research Center, the Lead Center for technical, or historical information from NASA's scientific and technical information. The NASA programs, projects, and missions, NASA STI Program Office provides access to the often concerned with subjects having NASA STI Database, the largest collection of substantial public interest. aeronautical and space science STI in the world. The Program Office is also NASA's institutional TECHNICAL TRANSLATION. English- mechanism for disseminating the results of its language translations of foreign scientific research and development activities. These results and technical material pertinent to NASA's are published by NASA in the NASA STI Report mission. Series, which includes the following report types: Specialized services that complement the STI TECHNICAL PUBLICATION. Reports of Program Office's diverse offerings include completed research or a major significant creating custom thesauri, building customized phase of research that present the results of data bases, organizing and publishing research NASA programs and include extensive data results.., even providing videos. or theoretical analysis. Includes compilations of significant scientific and technical data and For more information about the NASA STI information deemed to be of continuing Program Office, see the following: reference value. -

Gelation in Aerosols; Non-Mean-Field Aggregation and Kinetics
NASA/CR—2008-215280 Gelation in Aerosols; Non-Mean-Field Aggregation and Kinetics C.M. Sorensen and A. Chakrabarti Kansas State University, Manhattan, Kansas August 2008 NASA STI Program . in Profi le Since its founding, NASA has been dedicated to the papers from scientifi c and technical advancement of aeronautics and space science. The conferences, symposia, seminars, or other NASA Scientifi c and Technical Information (STI) meetings sponsored or cosponsored by NASA. program plays a key part in helping NASA maintain this important role. • SPECIAL PUBLICATION. Scientifi c, technical, or historical information from The NASA STI Program operates under the auspices NASA programs, projects, and missions, often of the Agency Chief Information Offi cer. It collects, concerned with subjects having substantial organizes, provides for archiving, and disseminates public interest. NASA’s STI. The NASA STI program provides access to the NASA Aeronautics and Space Database and • TECHNICAL TRANSLATION. English- its public interface, the NASA Technical Reports language translations of foreign scientifi c and Server, thus providing one of the largest collections technical material pertinent to NASA’s mission. of aeronautical and space science STI in the world. Results are published in both non-NASA channels Specialized services also include creating custom and by NASA in the NASA STI Report Series, which thesauri, building customized databases, organizing includes the following report types: and publishing research results. • TECHNICAL PUBLICATION. Reports of For more information about the NASA STI completed research or a major signifi cant phase program, see the following: of research that present the results of NASA programs and include extensive data or theoretical • Access the NASA STI program home page at analysis. -
Forensic-Explorer-User-Guide.En.Pdf
User Manual Published: 25-Jun-20 at 20:37:10 Chapter Contents Published: 25-Jun-20 at 20:36:59 Quick Start Guide ..................................................................................................................... 11 Wibu CodeMeter Activation Dongle ............................................................................................................... 11 System Requirements ..................................................................................................................................... 11 Download ........................................................................................................................................................ 11 Installation ...................................................................................................................................................... 12 Forensic Explorer Module Overview .............................................................................................................. 12 Live Boot ......................................................................................................................................................... 14 1.2 Introducing Forensic Explorer ............................................................................................................ 16 1.3 Supported file formats ....................................................................................................................... 16 1.4 Supported file systems ..................................................................................................................... -

Simulation Studies on Shape and Growth Kinetics for Fractal Aggregates in Aerosol and Colloidal Systems
SIMULATION STUDIES ON SHAPE AND GROWTH KINETICS FOR FRACTAL AGGREGATES IN AEROSOL AND COLLOIDAL SYSTEMS by WILLIAM RAYMOND HEINSON B.S., Kansas State University, 2008 AN ABSTRACT OF A DISSERTATION submitted in partial fulfillment of the requirements for the degree DOCTOR OF PHILOSOPHY Department of Physics College of Arts and Science KANSAS STATE UNIVERSITY Manhattan, Kansas 2015 Abstract The aim of this work is to explore, using computational techniques that simulate the motion and subsequent aggregation of particles in aerosol and colloidal systems, many common but not well studied systems that form fractal clusters. Primarily the focus is on cluster shape and growth kinetics. The structure of clusters made under diffusion limited cluster-cluster aggregation (DLCA) is looked at. More specifically, the shape anisotropy is found to have an inverse relationship on the scaling prefactor k0 and have no effect on the fractal dimension Df. An analytical model that predicts the shape and fractal dimension of diffusion limited cluster- cluster aggregates is tested and successfully predicts cluster shape and dimensionality. Growth kinetics of cluster-cluster aggregation in the free molecular regime where the system starts with ballistic motion and then transitions to diffusive motion as the aggregates grow in size is studied. It is shown that the kinetic exponent will crossover from the ballistic to the diffusional values and the onset of this crossover is predicted by when the nearest neighbor Knudsen number reaches unity. Simulations were carried out for a system in which molten particles coalesce into spheres, then cool till coalescing stops and finally the polydispersed monomers stick at point contacts to form fractal clusters.