Analysis Procedures Manual Chapters
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2. Basic Roadway Improvements the Street System Provides the Basic Network for Bicycle Travel
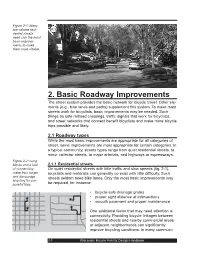
Figure 2-1: Many low-volume resi- YES dential streets need only the most basic improve- ments to make them more ridable. 2. Basic Roadway Improvements The street system provides the basic network for bicycle travel. Other ele- ments (e.g., bike lanes and paths) supplement this system. To make most streets work for bicyclists, basic improvements may be needed. Such things as safe railroad crossings, traffic signals that work for bicyclists, and street networks that connect benefit bicyclists and make more bicycle trips possible and likely. 2.1 Roadway types While the most basic improvements are appropriate for all categories of street, some improvements are most appropriate for certain categories. In a typical community, streets types range from quiet residential streets, to minor collector streets, to major arterials, and highways or expressways. Figure 2-2: Long blocks and a lack 2.1.1 Residential streets of connectivity On quiet residential streets with little traffic and slow speeds (fig. 2-1), make trips longer bicyclists and motorists can generally co-exist with little difficulty. Such and discourage streets seldom need bike lanes. Only the most basic improvements may bicycling for pur- poseful trips. be required, for instance: • bicycle-safe drainage grates • proper sight distance at intersections • smooth pavement and proper maintenance One additional factor that may need attention is connectivity. Providing bicycle linkages between residential streets and nearby commercial areas or adjacent neighborhoods can significantly improve bicycling conditions. In many communi- 2-1 Wisconsin Bicycle Facility Design Handbook ties, newer parts of town tend to have dis- Figure 2-3: Bicycle- continuous street networks that require bicy- pedestrian connec- clists, pedestrians, and motorists to travel a tions like that long distance to get to a nearby destination shown can provide (fig. -

Literature Review- Resource Guide for Separating Bicyclists from Traffic
Literature Review Resource Guide for Separating Bicyclists from Traffic July 2018 0 U.S. Department of Transportation Federal Highway Administration NOTICE This document is disseminated under the sponsorship of the U.S. Department of Transportation in the interest of information exchange. The U.S. Government assumes no liability for the use of the information contained in this document. This report does not constitute a standard, specification, or regulation. The U.S. Government does not endorse products or manufacturers. Trademarks or manufacturers’ names appear in this report only because they are considered essential to the objective of the document. Technical Report Documentation Page 1. REPORT NO. 2. GOVERNMENT ACCESSION NO. 3. RECIPIENT'S CATALOG NO. FHWA-SA-18-030 4. TITLE AND SUBTITLE 5. REPORT DATE Literature Review: Resource Guide for Separating Bicyclists from Traffic 2018 6. PERFORMING ORGANIZATION CODE 7. AUTHOR(S) 8. PERFORMING ORGANIZATION Bill Schultheiss, Rebecca Sanders, Belinda Judelman, and Jesse Boudart (TDG); REPORT NO. Lauren Blackburn (VHB); Kristen Brookshire, Krista Nordback, and Libby Thomas (HSRC); Dick Van Veen and Mary Embry (MobyCON). 9. PERFORMING ORGANIZATION NAME & ADDRESS 10. WORK UNIT NO. Toole Design Group, LLC VHB 11. CONTRACT OR GRANT NO. 8484 Georgia Avenue, Suite 800 8300 Boone Boulevard, Suite 300 DTFH61-16-D-00005 Silver Spring, MD 20910 Vienna, VA 22182 12. SPONSORING AGENCY NAME AND ADDRESS 13. TYPE OF REPORT AND PERIOD Federal Highway Administration Office of Safety 1200 New Jersey Ave., SE Washington, DC 20590 14. SPONSORING AGENCY CODE FHWA 15. SUPPLEMENTARY NOTES The Task Order Contracting Officer's Representative (TOCOR) for this task was Tamara Redmon. -

Evaluation of Concrete Pavements with Tied Shoulders Or Widened Lanes Bert E
39 19. K. Y. Kung. A New Method in Correlation Study of vision of Pavements. Proc., 3rd International Con Pavement Deflection and Cracking. Proc., 2nd In ference on Structural Design of Asphalt Pavements, ternational Conference on Structural Design of 1972, pp. 1188-1205. Asphalt Pavements, 1967, pp. 1037-1046. 20. P. H. Leger and P. Autret. The Use of Deflection Publication of this paper sponsored by Committee on Pavement Condi Measurements for the Structural Design and Super- tion Evaluation. Evaluation of Concrete Pavements With Tied Shoulders or Widened Lanes Bert E. Colley, Claire G. Ball, and Pichet Arriyavat, Portland Cement Association Field and laboratory pavements were instrumented and load tested to reducing pavement performance, Because of this prob evaluate the effect of widened lanes, concrete shoulders, and slab thick lem, several states have installed costly longitudinal ness on measured strains and deflectfons. Eight slabs were tested in the and transverse drainage systems. Thus, concrete field and two in the laboratory. Pavement slabs were 203, 229, or 254 shoulders and widened lanes have the potential for curing mm (8, 9, or 10 in) thick. Other major design variables included the width of lane widening, the presence or absence of dowels or of a con many drainage problems as well as providing additional crete shoulder, joint spacing, and the type of shoulder joint construc slab strength. tion. Generally, there was good agreement between measured strains and Many design features contribute to pavement life. values calculated by using Westergaard's theoretical equations. Concrete The effect of some of these features can be evaluated shoulders were effective in reducing the magnitude of measured strains analytically. -

Pedestrian and Bicycle Infrastructure Network Data Catalog
Pedestrian and Bicycle Infrastructure Network Data Catalog Created by Institute for Transportation Research and Education Bicycle and Pedestrian Program For North Carolina Department of Transportation Division of Bicycle and Pedestrian Transportation January 21, 2016 JANUARY 2016 PBIN DATA CATALOG PBIN Data Catalog Each dataset provides a consistent set of attribute fields on existing bicycle, pedestrian, and shared-use path data for use in asset management as well as proposed data for use in planning and project development by PGI awarded communities. Where applicable, fields or attributes marked with an asterisk (*) are required data for NCDOT Planning Grant Initiative (PGI) communities to collect and/or update as a condition of award. PGI communities should consider including additional fields or attributes from the Data Catalog when inventorying focus areas or corridors, as identified through the plan development process. The data catalog is broken up into three sections: 1. BICYCLE ASSETS The Bike_Fac_Linear feature class includes polyline data on existing and proposed facilities such as bike lanes, bike routes, bicycle boulevards, and paved shoulders. It also includes information on surface condition, facility width, slope, and rumble strips. The Bike_Fac_Point feature class includes polyline data on existing and proposed facilities such as bike parking, crossing improvement, bike boxes, bike share kiosks, and bike detection loops. It also includes information on bicycle-oriented signage and hazardous grates. It also includes information on surface condition, facility width, slope, and rumble strips. The Ped_Fac_Linear feature class includes polyline data on existing and proposed facilities such as sidewalks and other types of footpaths. It includes information on material, facility width, buffer, buffer width and slope. -

FHWA Bikeway Selection Guide
BIKEWAY SELECTION GUIDE FEBRUARY 2019 1. AGENCY USE ONLY (Leave Blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED February 2019 Final Report 4. TITLE AND SUBTITLE 5a. FUNDING NUMBERS Bikeway Selection Guide NA 6. AUTHORS 5b. CONTRACT NUMBER Schultheiss, Bill; Goodman, Dan; Blackburn, Lauren; DTFH61-16-D-00005 Wood, Adam; Reed, Dan; Elbech, Mary 7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES) 8. PERFORMING ORGANIZATION VHB, 940 Main Campus Drive, Suite 500 REPORT NUMBER Raleigh, NC 27606 NA Toole Design Group, 8484 Georgia Avenue, Suite 800 Silver Spring, MD 20910 Mobycon - North America, Durham, NC 9. SPONSORING/MONITORING AGENCY NAME(S) 10. SPONSORING/MONITORING AND ADDRESS(ES) AGENCY REPORT NUMBER Tamara Redmon FHWA-SA-18-077 Project Manager, Office of Safety Federal Highway Administration 1200 New Jersey Avenue SE Washington DC 20590 11. SUPPLEMENTARY NOTES 12a. DISTRIBUTION/AVAILABILITY STATEMENT 12b. DISTRIBUTION CODE This document is available to the public on the FHWA website at: NA https://safety.fhwa.dot.gov/ped_bike 13. ABSTRACT This document is a resource to help transportation practitioners consider and make informed decisions about trade- offs relating to the selection of bikeway types. This report highlights linkages between the bikeway selection process and the transportation planning process. This guide presents these factors and considerations in a practical process- oriented way. It draws on research where available and emphasizes engineering judgment, design flexibility, documentation, and experimentation. 14. SUBJECT TERMS 15. NUMBER OF PAGES Bike, bicycle, bikeway, multimodal, networks, 52 active transportation, low stress networks 16. PRICE CODE NA 17. SECURITY 18. SECURITY 19. SECURITY 20. -
Appendix a Bicycle and Trail Design Guidelines
Riverton Active Transportation Master Plan Appendix A Bicycle and Trail Design Guidelines 2015 PREPARED BY: Alta Planning + Design 8 Broadway Salt Lake City, UT 84111 DRAFT Appendix A: Bicycle and Trail Design Guidelines Contents Introduction ....................................................................................................................................................................................1 Design Needs of Pedestrians ....................................................................................................................................................4 Design Needs of Bicyclists ..........................................................................................................................................................6 Bicycle Facility Selection Guidelines .......................................................................................................................................9 Facility Classification ....................................................................................................................................................................... 10 Facility Continua ................................................................................................................................................................................ 11 Bicycle Facility Contextual Guidance ........................................................................................................................................ 12 Shared Roadways ..........................................................................................................................................................................13 -

Bicycle Lane Design
Maryland SHA Bicycle and Pedestrian Design Guidelines CHAPTER 3: BICYCLE LANE DESIGN 3.1 General Notes Bicycle lanes have been shown to increase the comfort level of bicyclists. Various studies have found that bicycle lanes have some distinct advantages over paved shoulders and wide outside lanes as they: Provide exclusive space for the bicyclist; Reduce wrong way bicycle riding; Encourage increased bicycle use; Increase motorist awareness of bicyclists; Encourage bicyclist to ride further away from parked vehicles; Reduce motorist lane changes when passing bicyclists; Provide visual guidance to cyclist navigating Figure 3.1: Bicycle Lane intersections (Hunter et al, 2005). Bicycle lanes have also been shown to have some of the following potentially negative operational characteristics: Require additional enforcement to prevent motorists from parking or stopping in the bicycle lane Create an impression that bicyclist must always operate in the bicycle lane (even if there is debris or an obstruction present) Can place bicyclist within the path of an opening parked vehicle door Designated bicycle lanes shall be considered if any one of the following criteria is met: It will be a minimum length of one-half (0.5) Figure 3.2 - Shared Road; Low Volume, Low Speed mile; Bicycle lanes are included in the local Master Plan; Existing or proposed adjacent land use will support bicycling (residential, commercial, educational, recreational, transit); or The bicycle lane would serve to connect other bicycle facilities, including shared use paths and bicycle routes. Bicycle lanes are usually not necessary for roadways with very low operating speeds (20 mph or less). In these locations, lane sharing between bicyclists and motor vehicles occurs naturally as there is little difference in speeds between them. -

A Special Meeting of the City Council of the City of Hickory Was Held In
December 15, 2020 A Special Meeting of the City Council of the City of Hickory was held in the Council Chambers of the Municipal Building on Tuesday, December 15, 2020 at 5:45 p.m., with the following members present: Hank Guess Tony Wood Charlotte Williams Aldermen David Zagaroli Danny Seaver Jill Patton* A quorum was present. *Alderwoman Patton attended simultaneously by electronic communication via Zoom. Also present were: City Manager Warren Wood, Assistant City Manager Rodney Miller, Assistant City Manager Rick Beasley, Transportation Planning Manager John Marshall, Community Development Manager Karen Dickerson, Public Works Director Steve Miller, Public Utilities Director Shawn Pennell, Executive Assistant Manager Yaidee Fox, City Attorney John Crone, Deputy City Clerk Crystal B. Mundy, and City Clerk Debbie D. Miller Representatives from Alta present: Mr. John Cock. Ms. Heather Seagle attended simultaneously by electronic communication via Zoom. I. Mayor Guess called the meeting to order. All Council members were present except for Alderman Williams. Alderwoman Patton attended simultaneously by electronic communication via Zoom. II. Presentation of Pedestrian and Bicycle Plan – Presented by Alta Transportation Planning Manager John Marshall thanked Council for coming in early to hear the presentation and consider the bicycle and pedestrian plan. He advised Council actually approved the contract for this plan approximately one year ago. Staff started the process last fall. They started talking with Alta last November. They had their first kickoff meeting in January of this year, before everything kind of went south. He recognized a couple people. Attending simultaneously by electronic communication via Zoom was Lindsay Stockman, from Live Well Catawba and the County Health Department. -

Bicycle Lane Design
On Road Bikeways Part 1: Bicycle Lane Design Presentation by: Nick Jackson Bill Schultheiss, P.E. September 04, 2012 On Road Bikeways Part 1: Bicycle Lane Design Follow the conversation: @tooledesign FOLLOW THE CONVERSATION ON TWITTER ÂToole Design Group is live tweeting this webinar Â@tooledesign Â#AASHTO #BikeGuide On Road Bikeways Part 1: Bicycle Lane Design Follow the conversation: @tooledesign WEBINAR #3: ON ROAD FACILITIES PART 1: BIKE LANES AND INTERSECTIONS Today’s Webinar  Significant Updates & New Content for bicycle lane design  Purpose & Benefits  Marking and Sign Basics  Intersections/Turns  Retrofitting On Road Bikeways Part 1: Bicycle Lane Design Follow the conversation: @tooledesign FUTURE WEBINARS  August 10: Overview  October 9: Shared Use Paths  August 22: Planning Chapter  General design principles  September 4: On-Road  Pathway geometry Bikeways Part I  October 23: Shared Use Paths  Bike Lanes (including Intersections)  Intersection Design  September 18: On-Road  Mid-block crossings Bikeways Part II  November 6: Bikeway  Shared lanes Maintenance and Operation  Bicycle boulevards & signing  Signals On Road Bikeways Part 1: Bicycle Lane Design Follow the conversation: @tooledesign DISCOUNT FOR WEBINAR PARTICIPANTS http://www.walkinginfo.org/training/pbic/ AASHTO_Promo_Flyer.pdf Link will be emailed to webinar attendees On Road Bikeways Part 1: Bicycle Lane Design Follow the conversation: @tooledesign SOME BACKGROUND ÂWhat is AASHTO?  Mission: “provides technical services to support states in their efforts to efficiently and safely move people and goods” ÂSome history  Last Guide – 1999, largely written in 96-98  Survey to update Guide - 2004 ÂStandards vs. -

Chapter 4: Other On-Road Bicycle Facilities and Considerations
Maryland SHA Bicycle and Pedestrian Design Guidelines CHAPTER 4: OTHER ON-ROAD BICYCLE FACILITIES AND CONSIDERATIONS 4.1 Shared Roadways In Maryland, shared roadways include all roadways EXCEPT the following: - Roadways with posted speed limits greater than 50 mph and no available shoulder for bicycle use (bicycle access is prohibited by Maryland law) - Controlled access freeways (except where specifically allowed such as sections of US 29 in Howard and Montgomery Counties). Many local roadways in Maryland with low traffic volumes (<1,000 ADT) and/or low speeds (<20mph) generally do not need special bicycle provisions (such as bicycle lanes) in order to be compatible for bicycle use. These roadways operate well in their current condition for shared use. However, state-maintained roadways in suburban and urban areas of Maryland typically carry higher volumes of motor W11-1 vehicle traffic and are therefore less compatible to bicycling unless paved shoulders or bicycle lanes are provided. 4.2 Share the Road Warning Signage SHARE THE ROAD warning signs can be used to alert motorists of the presence of bicyclists in locations where conflicts between motorists and bicyclists are W16-2 frequent, and where there are no immediate opportunities to provide additional space for bicyclists. Figure 4.1 The following are examples of where SHARE THE ROAD signs may be used: - where bicycling conditions are poor (i.e. locations with high volumes of traffic, operating speeds greater than 35 mph, no shoulder space, or poor pavement condition along roadway edge); - areas of roadway with poor sight distance; - transitions to shared travel lanes at the end of shoulders or bicycle lanes; - where an obstacle prevents bicyclists from continuing on an otherwise rideable shoulder. -
Minnesota Bicycle Transportation Planning and Design Guidelines
Minnesota Bicycle Transportation Planning and Design Guidelines ESO INN TA D M E N P O I A T R A T T M R E O N P T S OF TRAN Minnesota Department of Transportation June 1996 JUNE 17, 1996 BIKEWAYS MANUAL summary CHAPTER SUMMARY CHAPTER TITLE 1 INTRODUCTION 2 DESIGN FACTORS AND MAINTENANCE 3 THE BICYCLE NETWORK PLANNING PROCESS 4 ON-ROAD DESIGNS 5 PATHS 6 BRIDGES AND GRADE SEPARATIONS 7 TRAFFIC CONTROLS 8 BICYCLE PARKING JUNE 17, 1996 BIKEWAYS MANUAL contents (1) Chapter One INTRODUCTION 1-1.0 PURPOSE 1-2.0 POLICY AND GOALS 1-3.0 SCOPE 1-4.0 DEFINITIONS 1-5.0 THE TYPICAL BICYCLE, RIDER, AND DIMENSIONS 1-6.0 OPERATING SPACE 1-7.0 THE DESIGN BICYCLE 1-8.0 DESIGN APPROACH Chapter Two DESIGN FACTORS AND MAINTENANCE 2-1.0 GENERAL 2-2.0 SURFACE QUALITY AND UTILITY WORK 2-3.0 VEGETATION CONTROL Chapter Three THE BICYCLE NETWORK PLANNING PROCESS 3-1.0 GENERAL 3-2.0 DEVELOPING A COMMUNITY BICYCLE NETWORK PLAN 3-2.01 Establish Performance Criteria for the Bicycle Network 3-2.02 Inventory Existing System 3-2.03 Identify Bicycle Travel Corridors 3-2.04 Evaluate and Select Specific Route Alternatives 3-2.05 Design Treatments 3-2.05.01 Select Appropriate Facility Options 3-2.05.02 Factors Used to Determine Grade Separations (Tunnels and Bridges) 3-2.06 Evaluate the Finished Network Plan Using the Established Performance Criteria 3-2.07 Bicycle Parking and Security Chapter Four ON-ROAD DESIGNS 4-1.0 GENERAL 4-2.0 TYPES OF FACILITIES 4-2.01 Bicycle Lanes 4-2.02 Bicycles, Buses and Combination Bus/Bike Lanes contents (2) BIKEWAYS MANUAL JUNE 17, 1996 4-2.03 -

Chapter 6. Bicycling Infrastructure for Mass Cycling: a Transatlantic Comparison
Chapter 6. Bicycling Infrastructure for Mass Cycling: A Transatlantic Comparison Peter G. Furth Introduction For the bicycle to be useful for transportation, bicyclists need adequate route infrastructure – roads and paths on which to get places. In the 1890’s, when bicycling first became popular, bicyclists’ chief need was better paved roads. In the present era, however, it is not poor pavement but fast and heavy motor traffic that restricts cyclists’ ability to get places safely (Jacobsen 2009), as discussed in chapter 7. European and American policy has strongly diverged on how to address this challenge. In many European countries including the Netherlands, Germany, Denmark, and Sweden, cyclists’ need for separation from fast, heavy traffic is considered a fundamental principle of road safety. This has led to systematic traffic calming on local streets and, along busier streets, the provision of a vast network of “cycle tracks” – bicycle paths that are physically separated from motor traffic and distinct from the sidewalk. Cycle tracks (see Figures 6.1-6.3) may be at street level, separated from moving traffic by a raised median, a parking lane, or candlestick bollards; at sidewalk level, separated from the sidewalk by vertical elements (e.g., light poles), hardscape, a change in pavement or a painted line; or at an intermediate level, a curb step above the street, but also s small curb step below the sidewalk. [Figure 6.1 here] [Figure 6.2 here] [Figure 6.3 goes here] The success of this combination of traffic calming and cycle tracks has been well documented; for example, chapter 2 shows that the percentage of trips taken by bicycle, while less than one percent in the U.S., exceeds 10 percent in several European countries, reaching 27% in the Netherlands, while at the same time their bicycling fatality rate (fatalities per 1,000,000 km of bicycling) is several times less than in the U.S.