Model 2000 Multimeter User’S Manual 2000-900-01 Rev
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Digital Power Analyzer Model 4301
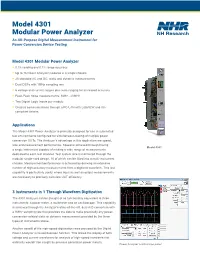
Model 4301 Modular Power Analyzer An All-Purpose Digital Measurement Instrument for Power Conversion Device Testing Model 4301 Modular Power Analyzer 0.1% reading and 0.1% range accuracy Up to 16 Power Analyzer modules in a single chassis 25 standard AC and DC, static and dynamic measurements Dual DSPs with 1MHz sampling rate 6 voltage and current ranges plus auto-ranging for increased accuracy Peak-Peak noise measurements, 10Hz - 20MHz Two Digital Logic Inputs per module Chassis communications through a PC/LAN with LabVIEW and IVI- compliant drivers Applications The Model 4301 Power Analyzer is primarily designed for use in automated test environments configured for simultaneous testing of multiple power conversion UUTs. The Analyzer’s advantage in this application are speed, size and measurement performance. Speed is achieved through having Model 4301 a single instrument capable of making a wide range of measurements dedicated to each test channel. Test system size is minimized through the modular single-card design, 16 of which can be fitted into a multi-instrument chassis. Measurement performance is achieved by deriving an extensive number of high accuracy measurements from a digitized waveform. This last capability is particularly useful where input as well as output measurements are necessary to precisely calculate UUT efficiency. 3 Instruments in 1 Through Waveform Digitization The 4301 Analyzer can be thought of as functionality equivalent to three instruments: a power meter, a multimeter and an oscilloscope. This capability is achieved through the Analyzer’s state-of-the-art, dual A/D converters with a 1MHz sampling rate that provides the data to make practically any power- conversion-related static or dynamic measurement provided by the three types of instruments above. -
Electrical Multimeter MMW02
Motors | Automation | Energy | Transmission & Distribution | Coatings Electrical Multimeter MMW02 Installation & Operation Manual Installation & Operation Manual Serie: MMW02 Language: English Summary SUMMARY 1 INTRODUCTION 10 1.1 CALIBRATION EXPIRY TERM ............................................................................................................10 1.2 CONFORMITY DECLARATION .............................................................................................................. 10 1.2.1 Reference Standards ................................................................................................................10 1.3 SAFETY INFORMATION .....................................................................................................................10 1.3.1 Dangers .....................................................................................................................................11 1.3.2 Attention ....................................................................................................................................11 1.4 RECEIVING THE PRODUCT ...............................................................................................................11 1.5 TECHNICAL SUPPORT AND ASSISTANCE ......................................................................................11 2 OVERVIEW 13 2.1 MEASURE OF BASIC QUANTITIES .................................................................................................13 2.2 THD CALCULATION ...........................................................................................................................13 -
Keysight 53147A/148A/149A Microwave Frequency Counter/Power Meter/DVM
Keysight 53147A/148A/149A Microwave Frequency Counter/Power Meter/DVM Assembly Level Service Guide Notices U.S. Government Rights Warranty The Software is “commercial computer THE MATERIAL CONTAINED IN THIS Copyright Notice software,” as defined by Federal Acqui- DOCUMENT IS PROVIDED “AS IS,” sition Regulation (“FAR”) 2.101. Pursu- AND IS SUBJECT TO BEING © Keysight Technologies 2001 - 2017 ant to FAR 12.212 and 27.405-3 and CHANGED, WITHOUT NOTICE, IN No part of this manual may be repro- Department of Defense FAR Supple- FUTURE EDITIONS. FURTHER, TO THE duced in any form or by any means ment (“DFARS”) 227.7202, the U.S. MAXIMUM EXTENT PERMITTED BY (including electronic storage and government acquires commercial com- APPLICABLE LAW, KEYSIGHT DIS- retrieval or translation into a foreign puter software under the same terms CLAIMS ALL WARRANTIES, EITHER language) without prior agreement and by which the software is customarily EXPRESS OR IMPLIED, WITH REGARD written consent from Keysight Technol- provided to the public. Accordingly, TO THIS MANUAL AND ANY INFORMA- ogies as governed by United States and Keysight provides the Software to U.S. TION CONTAINED HEREIN, INCLUD- international copyright laws. government customers under its stan- ING BUT NOT LIMITED TO THE dard commercial license, which is IMPLIED WARRANTIES OF MER- Manual Part Number embodied in its End User License CHANTABILITY AND FITNESS FOR A 53147-90010 Agreement (EULA), a copy of which can PARTICULAR PURPOSE. KEYSIGHT be found at http://www.keysight.com/ SHALL NOT BE LIABLE FOR ERRORS Edition find/sweula. The license set forth in the OR FOR INCIDENTAL OR CONSE- Edition 3, November 1, 2017 EULA represents the exclusive authority QUENTIAL DAMAGES IN CONNECTION by which the U.S. -
Power Meter Ml2430a Series Maintenance Manual
Maintenance Manual POWER METER ML2430A SERIES MAINTENANCE MANUAL Anritsu Company Part Number: 10585-00003 490 Jarvis Drive Revision: J Morgan Hill, CA 95037-2809 Published: February 2021 USA Copyright 2021 Anritsu Company Notes On Export Management This product and its manuals may require an Export License or approval by the government of the product country of origin for re-export from your country. Before you export this product or any of its manuals, please contact Anritsu Company to confirm whether or not these items are export-controlled.When disposing of export-controlled items, the products and manuals need to be broken or shredded to such a degree that they cannot be unlawfully used for military purposes. NOTICE Anritsu Company has prepared this manual for use by Anritsu Company personnel and customers as a guide for the proper installation, operation and maintenance of Anritsu Company equipment and computer programs. The drawings, specifications, and information contained herein are the property of Anritsu Company, and any unauthorized use or disclosure of these drawings, specifications, and information is prohibited; they shall not be reproduced, copied, or used in whole or in part as the basis for manufacture or sale of the equipment or software programs without the prior written consent of Anritsu Company. UPDATES Updates, if any, can be downloaded from the Documents area of the Anritsu Website at: http://www.anritsu.com For the latest service and sales contact information in your area, please visit: https://www.anritsu.com/Contact-US/ Table of Contents Chapter 1—General Information 1-1 Scope Of This Manual . -
Oscilloscope & Multimeter
INSTRUCTION OVERVIEW FOR Oscilloscope & Multimeter Stock No.64573 Part No.O20M/3C IMPORTANT: PLEASE READ THESE INSTRUCTIONS CAREFULLY TO ENSURE THE SAFE AND EFFECTIVE USE OF THIS PRODUCT. GENERAL INFORMATION These instructions accompanying the product are the original instructions. This document is part of the product, keep it for the life of the product passing it on to any subsequent holder of the product. Read all these instructions before assembling, operating or maintaining this product. This manual has been compiled by Draper Tools describing the purpose for which the product has been designed, and contains all the necessary information to ensure its correct and safe use. By following all the general safety instructions contained in this manual, it will ensure both product and operator safety, together with longer life of the product itself. AlI photographs and drawings in this manual are supplied by Draper Tools to help illustrate the operation of the product. Whilst every effort has been made to ensure the accuracy of information contained in this manual, the Draper Tools policy of continuous improvement determines the right to make modifications without prior warning. 1. TITLE PAGE 1.1 INTRODUCTION: USER MANUAL FOR: OSCILLOSCOPE & MULTIMETER Stock no. 64573 Part no. O20M/3C 1.2 REVISIONS: Date first published March 2015 As our user manuals are continually updated, users should make sure that they use the very latest version. Downloads are available from: http://www.drapertools.com/b2c/b2cmanuals.pgm DRAPER TOOLS LIMITED WEBSITE: drapertools.com HURSLEY ROAD PRODUCT HELPLINE: +44 (0) 23 8049 4344 CHANDLER’S FORD GENERAL FAX: +44 (0) 23 8026 0784 EASTLEIGH HAMPSHIRE SO53 1YF UK 1.3 UNDERSTANDING THIS MANUALS SAFETY CONTENT: WARNING! Information that draws attention to the risk of injury or death. -

Test & Measurement
Test & Measurement Crafted for optimum durability, reliability and functionality, our line of test and measurement equipment is engineered with the user in mind. Designed for, and by electricians, our electrical testers provide the latest in innovative, time-saving features that professionals require. Electrical Test & Measurement CL200 AUTO AC A Tough Digital Clamp Meters SELECT: True RMSInstructions MeasurementPackaging Technology Includes: Features CL600 CL700 CL800 • Carrying case • Test leads with CAT III/CAT IV safety Drop Protection 6.6 ft. (2 m) 6.6 ft. (2 m) 6.6 ft. (2 m) caps Ingress Protection IP40 IP40 IP40 • Thermocouple with adapter (temperature-measuring models only) CAT IV 600V CAT IV 600V CAT IV 600V Safety CAT III 1000V CAT III 1000V CAT III 1000V • Batteries AC Voltage (Volts) 1000V 1000V 1000V DC Voltage (Volts) 1000V 1000V 1000V AC Current (Amps) 600A 600A 600A DC Current (Amps) – – 600A • CAT IV 600V, CAT III 1000V, Class 2, Double insulaton safety rating Ohms (Resistance) 60MΩ 60MΩ 60MΩ • Built to withstand a 6.6 ft. (2 m) drop • Meets requirements for use in basic and controlled electromagnetic AC Millivolts – – – environments like residential, office and light-industrial locations DC Millivolts • The CL600 is an auto-ranging TRMS digital clamp meter that True RMS measures AC current via the clamp, and measures AC/DC voltage, resistance, continuity, and tests diodes via test leads Audible Continuity • The CL700 is an auto-ranging TRMS digital clamp meter that measures AC current via the clamp, and measures AC/DC voltage, Backlight resistance, continuity, frequency, capacitance, and tests diodes -14° – 1000°F -14° – 1000°F via test leads, and temperature via a thermocouple probe. -
MM400 INSTRUCTION MANUAL Auto-Ranging Digital Multimeter
ENGLISH MM400 INSTRUCTION MANUAL Auto-Ranging Digital Multimeter • DATA HOLD • AUDIBLE CONTINUITY • MIN / MAX • TEMPERATURE • DIODE TEST • CAPACITANCE 600V 10A 40MΩ ESPAÑOL pg. 19 FRANÇAIS pg. 37 ENGLISH GENERAL SPECIFICATIONS Klein Tools MM400 is an auto-ranging multimeter that measures AC/DC voltage, AC/DC current, and resistance. It can also measure temperature, capacitance, frequency, duty-cycle, and test diodes and continuity. • Operating Altitude: 6562 ft. (2000m) • Relative Humidity: <80% non-condensing • Operating Temp: 32°F to 104°F (0°C to 40°C) • Storage Temp: 14°F to 140°F (-10°C to 60°C) • Accuracy: Values stated at 65°F to 83°F (18°C to 28°C) • Temp Coef cient: 0.1 x (Quoted Accuracy) per °C above 28°C or below 18°C, corrections are required when ambient working temp is outside of Accuracy Temp range • Dimensions: 6.04" x 3.07" x 1.78" (153.4 x 78.0 x 45.2 mm) • Weight: 8.1 oz. (230 g) • Calibration: Accurate for one year • Standards: Conforms to: UL STD 61010-1, 61010-2-030, 61010-2-033. Certified to: CSA STD C22.2 # 61010-1, 61010-2-030, 61010-2-033. IEC EN 61010-1, 61010-2-030, 61010-2-033, 61326-1. • Pollution degree: 2 • Accuracy: ± (% of reading + # of least significant digits) • Drop Protection: 3.3 ft. (1m) • Safety Rating: CAT III 600V, Class 2, Double insulation CAT III: Measurement category III is applicable to test and measuring circuits connected to the distribution part of the building’s low-voltage MAINS installation. • Electromagnetic Environment: IEC EN 61326-1. -

Using Multimeters
ORESU-G1-77-005 C. 3 Usingmultimeters lVlarine electrorocs boats gPIII I,,",.", I,'59< ~4'pg,g!gg By EdwardKolbe DC voltmeter CommercialFisheries Engineer, OSU Marine ScienceCenter, Newport Most multirnetersare designedfor measuringboth DC and AC voltages. AssistantProfessor of Agricultural Engineering This bulletin concentrates on how to Oregon State University measureDC voltages;procedures for making AC measurementsare similar. First, plug one of the leadsinto the Multimeters measure electrical voltage, negativeterminal, properly called a resistance,and current, For wiring and jack, marked ! or "COM" for troubleshootingon boats,they can be common! . Standard electrical practice extremelyuseful. Applications include: usesthe black wire for the ground, checkingthe continuity of wiring which is usuallythe negativeterminal. locating breaksin opencircuits; testing The other lead usually red, to signify fusesand diodes;measuring battery the "hot" sideof the circuit! goesinto voltageand voltagedrop over wires and the positivejack, marked + !. After eIectricalloads; identifying "hot" and selectingthe proper DC voltagerange groundedwires; locatingshort circuitsor with the selector switch, measure DC smallcurrent leaks;and checking voltageby touchingthe -! lead to the alternator and generator output, negativeterminal or wire and the + ! A multimeter, also called a volt-ohm- lead to the positiveterminaI or wire. milliammeter VOM!, is actually three Selectingthe proper voltagerange is toob in one.It is a voltmetercapable of important. It is achieved -
Electrical Multimeter Instruction Sheet Safety Information a Warning Statement Identifies Hazardous Conditions and Actions That Could Cause Bodily Harm Or Death
Model 113 English Instruction Sheet Page 1 ® 113 Electrical Multimeter Instruction Sheet Safety Information A Warning statement identifies hazardous conditions and actions that could cause bodily harm or death. A Caution statement identifies conditions and actions that could damage the Meter or the equipment under test. To avoid possible electric shock or personal injury, follow these guidelines: • Use the Meter only as specified in this instruction sheet or the protection provided by the Meter might be impaired. • Do not use the Meter or test leads if they appear damaged, or if the Meter is not operating properly. • Always use proper terminals, switch position, and range for measurements. • Verify the Meter's operation by measuring a known voltage. If in doubt, have the Meter serviced. • Do not apply more than the rated voltage, as marked on Meter, between terminals or between any terminal and earth ground. • Use caution with voltages above 30 V ac rms, 42 V ac peak, or 60 V dc. These voltages pose a shock hazard. • Disconnect circuit power and discharge all high-voltage capacitors before testing resistance, continuity, diodes, or capacitance. PN 3083192 December 2007 ©2007 Fluke Corporation. All rights reserved. Specifications subject to change without notice. Printed in China Model 113 English Instruction Sheet Page 2 • Do not use the Meter around explosive gas, vapor or in wet environments. • When using test leads or probes, keep your fingers behind the finger guards. • Only use test leads that have the same voltage, category, and amperage ratings as the meter and that have been approved by a safety agency. -

Protable Multimeter Benchtop Multi Meter Wattmeter Student Meter Portable Digital Current Clamp and More
METER PROTABLE MULTIMETER BENCHTOP MULTI METER WATTMETER STUDENT METER PORTABLE DIGITAL CURRENT CLAMP AND MORE... WATTMETER WD SERIES Features .Mono-phase and tri-phase balance measures .Auto range selecting (WD3000) .Small power measure .Connection and operation simplicity .Accuracy: better than 2% at the full current and voltage scale .Protection against over-currents by fuses .Over current and over voltage indicator WD2250A Specifications .AC operation .Current ranges: 0.1A, 0.5A, 1A, 5A .Voltage ranges: 3V, 15V, 30V, 240V, 450V .Power measured: 0.3W~2250W (rate capacity) .Frequency ranges: 0~3kHz .LCD display: 3 1/ 2 digits .Dimensions: 235(W) 75(H) 170(D)mm .Weight: 0.6kg WD2250A WD2250B Specifications .Battery operation .Automatic shutdown of the wattmeter after 2mins with battery saver .The running time is about 8 hours in continuous operation .Current ranges: 0.1A, 0.5A, 1A, 5A .Voltage ranges: 3V, 15V, 30V, 240V, 450V .Power measured: 0.3W~2250W (rate capacity) .Frequency ranges: 0~3kHz .LCD display: 3 1/ 2 digits .Dimensions: 235(W) 75(H) 170(D)mm .Weight: 0.6kg WD2250B WD3000 Specifications .AC operation .Current ranges: 0~7A .Voltage ranges: 0~450V .Power measured: 0.3W~3150W (rate capacity) .Frequency ranges: 0~3kHz .LCD display: 3 1/ 2 digits .Dimensions: 235(W) 75(H) 170(D)mm .Weight: 0.6kg WD3000 117 R STUDENT METER STUDENT METER Feature .Compact size .Easy operation and stable work .Binding post or safety socket connection .Suitable for school experiment S Series Specifications Current Meter Model Type Range Connector -

Principles of RF Power Measurement
PRINCIPLES OF POWER MEASUREMENT A Reference Guide on RF & Microwave Power Measurement REVISED EDITION Principles of Power Measurement A Primer on RF & Microwave Power Measurement As we constantly strive to improve our products, the information in this document gives only a general indication of the product capacity, performance and suitability, none of which shall form part of any contract. We reserve the right to make design changes without notice. This material has been complied from a number of sources and Wireless Telecom Group accepts no responsibility for errors or omissions. Parent company Wireless Telecom Group © Wireless Telecom Group, 2015. All trademarks are acknowledged . www.WirelessTelecomGroup.com About Us Wireless Telecom Group is a global designer and manufacturer of radio frequency (“RF”) and micro- wave-based products for wireless and advanced communications industries. We market our prod- ucts and services worldwide under the Boonton Electronics (“Boonton”), Microlab/FXR (“Microlab”) and Noisecom brands. Our Brands and products have maintained a reputation for their accuracy and performance as they support our customers’ technological advancements within communications. We offer our customers a complementary suite of high performance instruments and components meeting a variety of standards including peak power meters, signal analyzers, noise sources, power splitters, combiners, diplexers, noise modules and precision noise generators. We serve commercial and government markets within the satellite, cable, radar, avionics, medical, and computing applica- tions. We are headquartered in Parsippany, New Jersey, in the New York City metropolitan area and we maintain a global network of Sales offices dedicated to providing excellent product support. Wireless Telecom Group, Inc. continuously targets opportunities that allow us to capitalize on our synergies and our talents. -

Complex Circuits Paige Cooper, Adriana Knight, Liz Larsen, Ryan Olesen Meters
Complex Circuits Paige Cooper, Adriana Knight, Liz Larsen, Ryan Olesen Meters Voltmeters are devices that measure voltage → use parallel connections Ammeters are devices that measure current → use series connections If charges only flow in one direction, then the circuit is considered a Direct Current. In this unit we are talking about meters that utilize DCs. Parallel Connection - A parallel circuit has more than one resistor (anything that uses electricity to do work) and gets its name from having multiple (parallel) paths to move along . Charges can move through any of several paths. - More current flows through the smaller resistance. (More charges take the easiest path.) - As the charges move through the resistors they do work on the resistor and as a result, they lose electrical energy. - By the time each charge makes it back to the battery, it has lost all the electrical energy given to it by the battery. - a charge can only do as much work as was done on it by the battery Series Connection In a series connection the currents all go through the same series of components in the circuit. Because of this, all of the components carry the same current. There is only one path in which the current may go. Analog Meters : Galvanometers ● Analog: Needles that swivel and point at number on the scale ● Digital meters: numerical readouts ● Current flows through the Galvanometers and produces a proportional needle deflection ● Current sensitivity→ It is deflection produced in the galvanometer per unit current flowing through it, the maximum current that the instrument can measure. ● The internal resistance of galvanometers are close to zero.