Spherical Harmonic Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
QUICK REFERENCE GUIDE Latitude, Longitude and Associated Metadata
QUICK REFERENCE GUIDE Latitude, Longitude and Associated Metadata The Property Profile Form (PPF) requests the property name, address, city, state and zip. From these address fields, ACRES interfaces with Google Maps and extracts the latitude and longitude (lat/long) for the property location. ACRES sets the remaining property geographic information to default values. The data (known collectively as “metadata”) are required by EPA Data Standards. Should an ACRES user need to be update the metadata, the Edit Fields link on the PPF provides the ability to change the information. Before the metadata were populated by ACRES, the data were entered manually. There may still be the need to do so, for example some properties do not have a specific street address (e.g. a rural property located on a state highway) or an ACRES user may have an exact lat/long that is to be used. This Quick Reference Guide covers how to find latitude and longitude, define the metadata, fill out the associated fields in a Property Work Package, and convert latitude and longitude to decimal degree format. This explains how the metadata were determined prior to September 2011 (when the Google Maps interface was added to ACRES). Definitions Below are definitions of the six data elements for latitude and longitude data that are collected in a Property Work Package. The definitions below are based on text from the EPA Data Standard. Latitude: Is the measure of the angular distance on a meridian north or south of the equator. Latitudinal lines run horizontal around the earth in parallel concentric lines from the equator to each of the poles. -
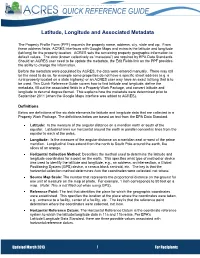
AIM: Latitude and Longitude
AIM: Latitude and Longitude Latitude lines run east/west but they measure north or south of the equator (0°) splitting the earth into the Northern Hemisphere and Southern Hemisphere. Latitude North Pole 90 80 Lines of 70 60 latitude are 50 numbered 40 30 from 0° at 20 Lines of [ 10 the equator latitude are 10 to 90° N.L. 20 numbered 30 at the North from 0° at 40 Pole. 50 the equator ] 60 to 90° S.L. 70 80 at the 90 South Pole. South Pole Latitude The North Pole is at 90° N 40° N is the 40° The equator is at 0° line of latitude north of the latitude. It is neither equator. north nor south. It is at the center 40° S is the 40° between line of latitude north and The South Pole is at 90° S south of the south. equator. Longitude Lines of longitude begin at the Prime Meridian. 60° W is the 60° E is the 60° line of 60° line of longitude west longitude of the Prime east of the W E Prime Meridian. Meridian. The Prime Meridian is located at 0°. It is neither east or west 180° N Longitude West Longitude West East Longitude North Pole W E PRIME MERIDIAN S Lines of longitude are numbered east from the Prime Meridian to the 180° line and west from the Prime Meridian to the 180° line. Prime Meridian The Prime Meridian (0°) and the 180° line split the earth into the Western Hemisphere and Eastern Hemisphere. Prime Meridian Western Eastern Hemisphere Hemisphere Places located east of the Prime Meridian have an east longitude (E) address. -

Latitude/Longitude Data Standard
LATITUDE/LONGITUDE DATA STANDARD Standard No.: EX000017.2 January 6, 2006 Approved on January 6, 2006 by the Exchange Network Leadership Council for use on the Environmental Information Exchange Network Approved on January 6, 2006 by the Chief Information Officer of the U. S. Environmental Protection Agency for use within U.S. EPA This consensus standard was developed in collaboration by State, Tribal, and U. S. EPA representatives under the guidance of the Exchange Network Leadership Council and its predecessor organization, the Environmental Data Standards Council. Latitude/Longitude Data Standard Std No.:EX000017.2 Foreword The Environmental Data Standards Council (EDSC) identifies, prioritizes, and pursues the creation of data standards for those areas where information exchange standards will provide the most value in achieving environmental results. The Council involves Tribes and Tribal Nations, state and federal agencies in the development of the standards and then provides the draft materials for general review. Business groups, non- governmental organizations, and other interested parties may then provide input and comment for Council consideration and standard finalization. Standards are available at http://www.epa.gov/datastandards. 1.0 INTRODUCTION The Latitude/Longitude Data Standard is a set of data elements that can be used for recording horizontal and vertical coordinates and associated metadata that define a point on the earth. The latitude/longitude data standard establishes the requirements for documenting latitude and longitude coordinates and related method, accuracy, and description data for all places used in data exchange transaction. Places include facilities, sites, monitoring stations, observation points, and other regulated or tracked features. 1.1 Scope The purpose of the standard is to provide a common set of data elements to specify a point by latitude/longitude. -

Why Do We Use Latitude and Longitude? What Is the Equator?
Where in the World? This lesson teaches the concepts of latitude and longitude with relation to the globe. Grades: 4, 5, 6 Disciplines: Geography, Math Before starting the activity, make sure each student has access to a globe or a world map that contains latitude and longitude lines. Why Do We Use Latitude and Longitude? The Earth is divided into degrees of longitude and latitude which helps us measure location and time using a single standard. When used together, longitude and latitude define a specific location through geographical coordinates. These coordinates are what the Global Position System or GPS uses to provide an accurate locational relay. Longitude and latitude lines measure the distance from the Earth's Equator or central axis - running east to west - and the Prime Meridian in Greenwich, England - running north to south. What Is the Equator? The Equator is an imaginary line that runs around the center of the Earth from east to west. It is perpindicular to the Prime Meridan, the 0 degree line running from north to south that passes through Greenwich, England. There are equal distances from the Equator to the north pole, and also from the Equator to the south pole. The line uniformly divides the northern and southern hemispheres of the planet. Because of how the sun is situated above the Equator - it is primarily overhead - locations close to the Equator generally have high temperatures year round. In addition, they experience close to 12 hours of sunlight a day. Then, during the Autumn and Spring Equinoxes the sun is exactly overhead which results in 12-hour days and 12-hour nights. -

Symmetric Coverage of Dynamic Mapping Error for Mobile Sensor Networks
2011 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 29 - July 01, 2011 Symmetric coverage of dynamic mapping error for mobile sensor networks Carlos H. Caicedo-Nu´nez˜ and Naomi Ehrich Leonard Abstract—We present an approach to control design for nonuniform density fields. Related problems include control a mobile sensor network tasked with sampling a scalar field of a mobile sensor network in a noisy, possibly time-varying and providing optimal space-time measurements. The coverage field for minimum-error spatial estimation [9], [10] and metric is derived from the mapping error in objective analysis (OA), an assimilation scheme that provides a linear statistical cooperative exploration of features [11]. In [12] agents are estimation of a sampled field. OA mapping error is an example deployed in a distributed way in order to maximize the of a consumable density field: the error decreases dynamically probability of event detection. The authors of [13] study the at locations where agents move and sample. OA mapping error distributed implementation of maximizing joint entropy in is also a regenerating density field if the sampled field is measurements. However, none of these methods have been time-varying: error increases over time as measurement value decays. The resulting optimal coverage problem presents a chal- designed to specifically address a spatial-temporal density lenge to traditional coverage methods. We prove a symmetric field that changes in response to the motion of the agents. dynamic coverage solution that exploits the symmetry of the In this paper we propose a coverage strategy for a density domain and yields symmetry-preserving coordinated motion field defined by OA mapping error in the case that the of mobile sensors. -
Spherical Coordinate Systems
Spherical Coordinate Systems Exploring Space Through Math Pre-Calculus let's examine the Earth in 3-dimensional space. The Earth is a large spherical object. In order to find a location on the surface, The Global Pos~ioning System grid is used. The Earth is conventionally broken up into 4 parts called hemispheres. The North and South hemispheres are separated by the equator. The East and West hemispheres are separated by the Prime Meridian. The Geographic Coordinate System grid utilizes a series of horizontal and vertical lines. The horizontal lines are called latitude lines. The equator is the center line of latitude. Each line is measured in degrees to the North or South of the equator. Since there are 360 degrees in a circle, each hemisphere is 180 degrees. The vertical lines are called longitude lines. The Prime Meridian is the center line of longitude. Each hemisphere either East or West from the center line is 180 degrees. These lines form a grid or mapping system for the surface of the Earth, This is how latitude and longitude lines are represented on a flat map called a Mercator Projection. Lat~ude , l ong~ude , and elevalion allows us to uniquely identify a location on Earth but, how do we identify the pos~ion of another point or object above Earth's surface relative to that I? NASA uses a spherical Coordinate system called the Topodetic coordinate system. Consider the position of the space shuttle . The first variable used for position is called the azimuth. Azimuth is the horizontal angle Az of the location on the Earth, measured clockwise from a - line pointing due north. -

Journal of Computational and Applied Mathematics Numerical Integration
Journal of Computational and Applied Mathematics 233 (2009) 279–292 Contents lists available at ScienceDirect Journal of Computational and Applied Mathematics journal homepage: www.elsevier.com/locate/cam Numerical integration over polygons using an eight-node quadrilateral spline finite elementI Chong-Jun Li a,∗, Paola Lamberti b, Catterina Dagnino b a School of Mathematical Sciences, Dalian University of Technology, Dalian 116024, China b Department of Mathematics, University of Torino, via C. Alberto, 10 Torino 10123, Italy article info a b s t r a c t Article history: In this paper, a cubature formula over polygons is proposed and analysed. It is based Received 9 February 2009 on an eight-node quadrilateral spline finite element [C.-J. Li, R.-H. Wang, A new 8-node Received in revised form 8 July 2009 quadrilateral spline finite element, J. Comp. Appl. Math. 195 (2006) 54–65] and is exact for quadratic polynomials on arbitrary convex quadrangulations and for cubic polynomials on MSC: rectangular partitions. The convergence of sequences of the above cubatures is proved for 65D05 continuous integrand functions and error bounds are derived. Some numerical examples 65D07 are given, by comparisons with other known cubatures. 65D30 65D32 ' 2009 Elsevier B.V. All rights reserved. Keywords: Numerical integration Spline finite element method Bivariate splines Triangulated quadrangulation 1. Introduction The problem considered in this paper is the numerical evaluation of Z IΩ .f / D f .x; y/dxdy; (1) Ω 2 where f 2 C.Ω/ and Ω is a polygonal domain in R , i.e. a domain with the boundary composed of piecewise straight lines. -

Latitude and Longitude
Latitude and Longitude Finding your location throughout the world! What is Latitude? • Latitude is defined as a measurement of distance in degrees north and south of the equator • The word latitude is derived from the Latin word, “latus”, meaning “wide.” What is Latitude • There are 90 degrees of latitude from the equator to each of the poles, north and south. • Latitude lines are parallel, that is they are the same distance apart • These lines are sometimes refered to as parallels. The Equator • The equator is the longest of all lines of latitude • It divides the earth in half and is measured as 0° (Zero degrees). North and South Latitudes • Positions on latitude lines above the equator are called “north” and are in the northern hemisphere. • Positions on latitude lines below the equator are called “south” and are in the southern hemisphere. Let’s take a quiz Pull out your white boards Lines of latitude are ______________Parallel to the equator There are __________90 degrees of latitude north and south of the equator. The equator is ___________0 degrees. Another name for latitude lines is ______________.Parallels The equator divides the earth into ___________2 equal parts. Great Job!!! Lets Continue! What is Longitude? • Longitude is defined as measurement of distance in degrees east or west of the prime meridian. • The word longitude is derived from the Latin word, “longus”, meaning “length.” What is Longitude? • The Prime Meridian, as do all other lines of longitude, pass through the north and south pole. • They make the earth look like a peeled orange. The Prime Meridian • The Prime meridian divides the earth in half too. -
Conventional Terrestrial Reference Frame
CHAPTER 3 CONVENTIONAL TERRESTRIAL REFERENCE FRAME Definition The Terrestrial Reference System adopted for either the analysis of individual data sets by techniques (VLBI, SLR, LLR, GPS...) or the combination of individual Solutions into a unified set of data (Station coordinates, Earth orientation parameters, etc..) follows these criteria (Boucher, 1991): a) It is geocentric, the center of mass being defined for the whole Earth, including oceans and atmosphere. b) Its scale is that of a local Earth frame, in the meaning of a relativistic theory of gravitation. c) Its orientation is given by the BIH orientation at 1984.0. d) Its time evolution in orientation will create no residual global rotation with regards to the crust. Realization When one wants to realize such a conventional terrestrial reference system through a reference frame i.e. a network of Station coordinates, it will be specified by Cartesian equatorial coordinates X, Y, and Z, by preference. If geographical coordi nates are needed, the GRS80 ellipsoid is recommended (see table 3.2) . Each analysis center compares its reference frame to a realization of the Conventional Terrestrial Reference System (CTRS), as described above. Within IERS, each Terrestrial Reference System (TRF) is either directly, or after transformation, expressed as a realization of the CTRS adopted by IERS as its ITRS. The position of a point located on the surface of the solid Earth should be expressed by X(t) = X0 + VQ(t-t0) +£AXi(ü), 2 where AXj are corrections to various time changing effects, and X0 and V0 are position and velocity at the epoch t0. -

MATHEMATICAL TRIPOS Part IB 2017
MATHEMATICALTRIPOS PartIB 2017 List of Courses Analysis II Complex Analysis Complex Analysis or Complex Methods Complex Methods Electromagnetism Fluid Dynamics Geometry Groups, Rings and Modules Linear Algebra Markov Chains Methods Metric and Topological Spaces Numerical Analysis Optimisation Quantum Mechanics Statistics Variational Principles Part IB, 2017 List of Questions [TURN OVER 2 Paper 3, Section I 2G Analysis II What does it mean to say that a metric space is complete? Which of the following metric spaces are complete? Briefly justify your answers. (i) [0, 1] with the Euclidean metric. (ii) Q with the Euclidean metric. (iii) The subset (0, 0) (x, sin(1/x)) x> 0 R2 { } ∪ { | }⊂ with the metric induced from the Euclidean metric on R2. Write down a metric on R with respect to which R is not complete, justifying your answer. [You may assume throughout that R is complete with respect to the Euclidean metric.] Paper 2, Section I 3G Analysis II Let X R. What does it mean to say that a sequence of real-valued functions on ⊂ X is uniformly convergent? Let f,f (n > 1): R R be functions. n → (a) Show that if each fn is continuous, and (fn) converges uniformly on R to f, then f is also continuous. (b) Suppose that, for every M > 0, (f ) converges uniformly on [ M, M]. Need n − (fn) converge uniformly on R? Justify your answer. Paper 4, Section I 3G Analysis II State the chain rule for the composition of two differentiable functions f : Rm Rn → and g : Rn Rp. → Let f : R2 R be differentiable. -

Social Studies Class 5 Lesson 3 Latitudes and Longitudes
Social Studies Class 5 Lesson 3 Latitudes And Longitudes Learning Objectives; Parallels or Latitudes Important Latitudes Meridians or Longitudes Locating Places Since the Earth is spherical in shape, it is difficult to locate a place on Earth. So our mapmakers devised a system of imaginary lines to form a net or grid on maps and globes Thus there are a number of horizontal and vertical lines drawn on maps and globes to help us locate a place. Any location on Earth is described by two numbers--- its Latitude and its Longitude. The imaginary lines that run from East to West are called Parallels or Lines of Latitude. The imaginary lines that run North to South from the poles are called Meridians or the lines of Longitude. LATITUDES Lines of Latitude are east-west circles around the globe. Equator is the 0˚ latitude. It runs through the centre of the globe, halfway between the north pole and the south pole which are at 90˚. Equator 0 North pole 90˚N South pole 90˚S The Equator divides the Earth into two equal halves called hemispheres. 1. Northern Hemisphere: The upper half of the Earth to the north of the equator is called Northern Hemisphere. 2. Southern Hemisphere:The lower half of the earth to the south of the equator is called Southern Hemisphere. Features of Latitude These lines run parallel to each other. They are located at an equal distance from each other. They are also called Parallels. All Parallels form a complete circle around the globe. North Pole and South Pole are however shown as points. -

How to Determine Latitude and Longitude from Topographic Maps
Oregon Department of Environmental Quality HOW TO DETERMINE LATITUDE AND LONGITUDE FROM TOPOGRAPHIC MAPS Latitude is the distance north or south of the equator. 2. For each location, construct a small rectangle around Longitude is the distance east or west of the prime the point with fine pencil lines connecting the nearest meridian (Greenwich, England). Latitude and longitude 2-1/2′ or 5′ graticules. Graticules are intersections of are measured in seconds, minutes, and degrees: latitude and longitude lines that are marked on the map edge, and appear as black crosses at four points in ″ ′ 60 (seconds) = 1 (minute) the interior of the map. 60′ (minutes) = 1° (degree) 3. Read and record the latitude and longitude for the To determine the latitude and longitude of your facility, southeast corner of the small quadrangle drawn in step you will need a topographic map from United States two. The latitude and longitude are printed at the edges Geological Survey (USGS). of the map. How to Obtain USGS Maps: 4. To determine the increment of latitude above the latitude line recorded in step 3: USGS maps used for determining latitude and longitude • Position the map so that you face its west edge; may be obtained from the USGS distribution center. These maps are available in both the 7.5 minute and l5 • Place the ruler in approximately a north-south minute series. For maps of the United States, including alignment, with the “0” on the latitude line recorded Alaska, Hawaii, American Samoa, Guam, Puerto Rico, in step 3 and the edge intersecting the point.