INDIAN SOCIETY of GEOMATICS I Journal of Geomatics Vol
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

42486-018: Madhya Pradesh Urban Services
Land Acquisition and Involuntary Resettlement Due Diligence Report Document stage: Draft for consultation Project Number: 42486-018 October 2020 IND: Madhya Pradesh Urban Services Improvement Project – Additional Financing (Water Supply Scheme in Pichhore, District Gwalior) Package No: MPUSIP- 4E Prepared by Urban Development and Environment Department, Bhopal (Madhya Pradesh) for the Asian Development Bank. CURRENCY EQUIVALENTS (as of 12 October 2020) Currency unit – Indian rupee (₹) ₹1.00 = $0.014 $1.00 = ₹73.31 ABBREVIATIONS ADB - Asian Development Bank CW FM - clear water feeder main DDR - due diligence report DPR - detailed project report FGD - focus group discussion GOI - Government of India GOMP - Government of Madhya Pradesh LPCD - Liter per Capita per Day MDPE - Medium Density Polyethylene pipes MFI - multilateral financial institutions MLD - Million Liter per Day MPUDC - Madhya Pradesh Urban Development Company MPUSIP - Madhya Pradesh Urban Services Improvement Project NOC - No Objection Certificate OHT - overhead tank PIU - program implementation unit PMU - program management unit PWD - Public Works Department RFCTLARRA - Right to Fair Compensation and Transparency in Land Acquisition, Rehabilitation and Resettlement Act ROW - right-of-way RWGM raw water rising main SPS - Safeguard Policy Statement EDED - Urban Development and Environment Department ULBs - Urban Local Bodies WRD - Water Resource Department WSS - water supply scheme WTP - water treatment plant WEIGHTS AND MEASURES Ha – hectare kl – kiloliter km – kilometer LPCD – liter per capita day m – meter MLD – million liters per day mm – millimeter NOTE In this report, "$" refers to United States dollars. This draft land acquisition and involuntary resettlement due diligence report is a document of the borrower. The views expressed herein do not necessarily represent those of ADB's Board of Directors, Management, or staff, and may be preliminary in nature. -

271120191113351031248261119
Data under the Central Sector Scheme of Scholarship for College and University Students S.No.. Application ID Board Name Applicant Name Father's Name Categroy Gender Annual Applicant's Applicant's Applicant's Institute Name Institute Address Applicant's Applicant's Renewal Application Status Family Address District Domicile State Mobile Email Status Income 1 MP201819008150636 BOARD OF SECONDARY SAPNA PANCHAL MAHESH OBC F 35000 WARD NO 5 AGARMALWA MADHYA MATA JEEJA BAI moti tabela indore (m.p.) 9424074178 sapnapanchal62 Renewed Application Under EDUCATION , BHOPAL PANCHAL MACHALPURA PRADESH GOVT. P.G. GIRLS [email protected] Process for ROAD DIST COLLEGE MOTI Verification at AGARMALWA TABELA, INDORE Institute Level MP 2 MP201819000786710 BOARD OF SECONDARY RAJU PRAJAPATI BAISAKHU SC M 40000 JANUNA ANUPPUR MADHYA GOVT. Civil Lines - Pachpedi, 9179792038 praju6181@gm Renewed Application Under EDUCATION , BHOPAL PRAJAPATI COLLIERY WARD PRADESH AUTONMOUS Jabalpur ail.com Process for NO 05 ANUPPUR SCIENCE COLLEGE, Verification at CIVIL LINESR, Institute Level 3 MP201819008030317 BOARD OF SECONDARY SOURABH MAHESH SINGH GENERAL M 40000 GRAM DERKA ASHOKNAGAR MADHYA GOVT. NEHRU Govt. Nehru Degree 7828270629 SOURABHRAGH Renewed Application Under EDUCATION , BHOPAL RAGHUWANSHI ASHOKNAGAR PRADESH DEGREE COLLEGE College, Near Bypass, UWANSHI@GM Process for Eshagarh Road, AIL.COM Verification at Ashoknagar, Ashoknagar Institute Level 4 MP201819008715789 BOARD OF SECONDARY PRIYAM JAIN pawan jain GENERAL F 50000 ward no 4 jain ASHOKNAGAR MADHYA GOVT. NEHRU Govt. Nehru Degree 8827902908 Renewed Application Under EDUCATION , BHOPAL mandir ke pass PRADESH DEGREE COLLEGE College, Near Bypass, Process for piprai Eshagarh Road, Verification at Ashoknagar, Ashoknagar Institute Level 5 MP201819001892162 BOARD OF SECONDARY RISHI KUMAR SAHU shambhu dayal OBC M 40000 near jain ASHOKNAGAR MADHYA NATIONAL National Institute of 8878134349 iitianrishi50@g Renewed Application Under EDUCATION , BHOPAL sahu tempaln ,gram PRADESH INSTITUTE OF Technology Raipur G.E. -

Affiliated General College List 2016-17
1 JIWAJI UNIVERSITY, GWALIOR AFFILIATION FOR GENERAL COURSES 2016-17 S. No. Name of College 1 A.S. DEGREE COLLEGE, KAILARAS, MORENA 2 ACHARYA NARENDRA DEV COLLEGE, KAILARAS, (MORENA) 3 B.L. MAHAVIDYALYA, JOURI ROAD, MORENA 4 S.R.D. COLLEGE MORENA 5 RISHI GALAV COLLEGE, MORENA 6 PT. S.C.UPAADHYAYA COLLEGE, JOURA KHURD, MORENA 7 GENIUS MAHAVIDYALYA, MORENA 8 T.S.S. COLLEGE, MORENA 9 JAI HIND BISMIL COLLEGE, AMBAH 10 UMA DEGREE COLLEGE, ADOKHAR, AMBAH ROAD, MORENA 11 A.D.S. MAHAVIDHYALAYA, AMBAH, MURENA 12 SHRI G.L.S. COLLEGE, BANMORE (MORENA) 13 SHIV SHANKER COLLEGE, SUMAVALI (MORENA) 14 M G M COLLEGE, MORENA 15 PANDIT DEENDAYAL UPADHYAY MAHA VIDHYALAY, PORSA 16 N.A.S. COLLEGE, PORSA 17 R V S COLLEGE,JOTAI ROAD,PORSA 18 SHRI VAISHNAV COLLEGE OF MANAGEMENT, MORENA 19 JAI MATA DI MAHA VIDHYALAY, MORENA C P S COLLEGE, BADAGAON, MORENA PCM- 480 20 PCB- 293 21 SWAMI VIVEKANAND MAHAVIDYALAY, AMBAH 22 SHIVAM MAHAVIDHYALAY,PORSA 23 S.B.D. ARTS & SCIENCE COLLEGE, PORSA, MORENA 24 MAA SHANTI DEVI COLLEGE KUTGHAN SABALGARH (MORENA) 25 MAHARANA PRATAP COLLEGE, GULALAI, SABALGARH (MORENA ) 26 JAIN MAHAVIDHYALAY, NAINAGARH ROAD, MORENA 27 K.S. College,Morena 28 PT. Nehru College Banmore, Morena 29 J.B. COLLEGE JOURA, MORENA 30 SWAMI VIVEKANAND MAHAVIDYALAY, BILGAO JOURA ,MORENA 31 AMBAH P.G. COLLEGE, AMBAH, MORENA 32 P.S.T. COLLEGE, BADFARA, AMBAH, MORENA 33 SUBHASH CHANDRA BOSE COLLEGE, PAHADGARH, MORENA SWAMI SHREE RAMKRISHNA PARAMHANS, MAHAVIDYALAYA, 34 MORENA 35 SUBHASH COLLEGE, KAILARAS, MORENA 36 MAA SHANTI DEVI COLLEGE (BADOKHAR) MORENA 37 SHRI RAM INSTITUTE OF INFORMATION TECHNOLOGY, BANMORE 38 J.B. -
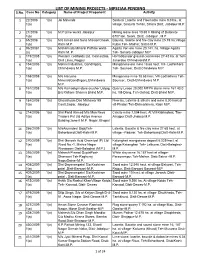
LIST of MINING PROJECTS - MPSEIAA PENDING S.No
LIST OF MINING PROJECTS - MPSEIAA PENDING S.No. Case No Category Name of Project Proponent Activity 1 22/2008 1(a) Jai Minerals Sindursi Laterite and Haematite mine 9.0 ha.. at 1(a) village, Sindursi Tehsil, Sihora Distt. Jabalpur M.P. 2 27/2008 1(a) M.P Lime works Jabalpur Mining lease area 10.60 h Mining of Dolomite 1(a) 6707 ton. Seoni, Distt. Jabalpur , M.P 3 65/2008 1(a) M/s Ismail and Sons MissionChowk, Bauxite, laterite and fire clay mine 25.19 ha.Village 1(a) Katni M.P . Kubin Teh- Maihar, Satna M.P. 4 96/20081 1(a) M/sNirmala Minaral Pathale ward- Agaria Iron ore mine 20.141. ha. Village Agaria (a) Katni M. P. Teh- Sehora Jabalpur M.P 5 119/2008 1(a) Western coalfields Ltd, Coal estate, Harradounder ground coal mines 27-45 ha. at Teh- 1(a) Civil Lines, Nagpur Junerdeo ChhindwaraM.P. 6 154/2008 1(a) Mohini Industries, Gandhiganj, Manganese ore mine 18.68 hect. Vill- Lodhikhera 1(a) Chhindwara M.P. Teh- Souncer, Distt.Chindwara M.P. 7 158/2008 1(a) M/s Haryana Manganese mine 18.68 hect. Vill-Lodhikhera Teh- 1(a) MineralsGandhiganj,Chhindwara Souncer, Distt-Chhindwara M.P. M.P. 8 161/2008 1(a) M/s Kamadigiri store crusher Udyog Quarry Lease 20,000 MTPA stone mine 161 43.0 1(a) Brij Kishore Sharma Bhind M.P. ha. Vill-Dang, Teh-Gohad, Distt-Bhind M.P. 9 184/2008 1(a) Ghanshyam Das Mahawar 95 Fireclay, Laterite & silica's and mine 8.00 hact.at 1(a) Cantt.Sadar, Jabalpur vill-Pindari Teh-Dhimarkhera, Katni M.P. -
SQM Programme Oct2018.Pdf
TECH QC T-6 S-59 izfr] egkizca/kda ¼leLr½ Jh----------------------------------------------------------- e-iz- xzkeh.k lM+d fodkl izkf/kdj.k LVsV DokfyVh ekWfuVj ¼leLr½ ifj;kstuk fØ;kUo;u bdkbZ] ---------------------------------------------------------------- ---------------------------------------------------------------- &&&&&&&&&&&&&&&&&¼e-iz-½ fo"k;%& LVsV DokfyVh ekfuVlZ dk fujh{k.k dk;ZØe ekg vDVwcj&2018A && && 00 iz/kkuea=h xzke lM+d ;kstuk ds ,oa vU; dk;kZs ds Second Tier Quality Monitoring fujh{k.k gsrq ekg vDVwcj&2018 dk fujh{k.k dk;ZØe layXu gS %& 1- fujh{k.k gsrq ftyk vUrxZr fu;qDr fd;s x;s SQM dh lwph layXu gSA 2- fujh{k.k gsrq MPRCP ds ekxksZ dh lwph Geo Reach Software ij ,oa PMGSY vUrxZr ekxksZa dh lwph] ,l-D;w-,e- ds eksckbZy gsaM lsV ij izkIr gksxhA lHkh ,l-D;w-,e- dks MPRCP ds ekxksZ dk fujh{k.k Geo Reach Software ds ek/;e ls ,oa PMGSY vUrxZr ekxksZa dk fujh{k.k eksckbZy Qksu ds ek/;e ls gh fd;k tkuk vfuok;Z gSA PMGSY ekxksZ ds laca/k esa ;g lqfuf’pr gks fd muds eksckbZy Qksu ij ekxZ dh lwph viyksM dh tk pqdh gSA fujh{k.k mijkar fd;s x;s fujh{k.k dh fjiksVZ OMMAS lkbZV ij vfuok;Z :i ls Upload djsaA 3- ,u-D;w-,e- ,oa ,l-D;w-,e- dh yafcr ,-Vh-vkj- dk fujkdj.k izkFkfedrk ij fd;k tkosA 4- OMMAS lkbZV ij ,l-D;w-lh- }kjk viyksM fd, x, ekxksZ dks izkFkfedrk ds vk/kkj ij fujh{k.k djk;k tkosA mDr ekxksZ dk fujh{k.k u fd;s tkus ij bls xaHkhjrk ls fy;k tkosxk&d`i;k uksV djssA lkbV ij viyksM fd;s x;s ekxksZ dh izkFkfedrk Geo reach bdkbZ ds egkizca/kd }kjk fu/kkZfjr dh tkosxhA bl dk;kZy; ds i= Ø- 13151 fnukad 23- 05-17 }kjk dsoy o -

40423-053: Due Diligence of Ongoing Projects in Assam, Chhattisgarh
Due Diligence Report on Social Safeguards April 2015 IND: Rural Connectivity Investment Program – Project 3 Due Diligence of Ongoing Projects in Assam, Chhattisgarh, Madhya Pradesh, Odisha, and West Bengal under Project 1 and Project 2 (Loan 2881-IND) and (Ln 3065-IND) Prepared by Ministry of Rural Development, Government of India for the Asian Development Bank. CURRENCY EQUIVALENTS (as of 31 March 2015) Currency unit – Indian rupees (INR/Rs) Rs1.00 = $ 0.016 $1.00 = Rs 62.5096 ACRONYMS AND ABBREVIATIONS ADB : Asian Development Bank APs : Affected Persons BPL : Below Poverty Line CD : Cross Drainage DM : District Magistrate EA : Executing Agency EAF : Environment Assessment Framework ECOP : Environmental Codes of Practice FFA : Framework Financing Agreement GOI : Government of India GRC : Grievances Redressal Committee IA : Implementing Agency IEE : Initial Environmental Examination MFF : Multi-Project Financing Facility MORD : Ministry of Rural Development MOU : Memorandum of Understanding NC : Not Connected NGO : Non-Government Organization NRRDA : National Rural Road Development Agency NREGP : National Rural Employment Guarantee Program PIU : Project Implementation Unit PIC : Project Implementation Consultants PFR : Periodic Finance Request PMGSY : Pradhan Mantri Gram Sadak Yojana RCIP : Rural Connectivity Investment Programme ROW : Right-of-Way RRP : Report and Recommendation of the President RRSIP II : Rural Roads Sector II Investment Program SRRDA : State Rural Road Development Agency ST : Scheduled Tribes TA : Technical Assistance TOR : Terms of Reference TSC : Technical Support Consultants UG : Upgradation WHH : Women Headed Households GLOSSARY Affected Persons (APs): Affected persons are people (households) who stand to lose, as a consequence of a project, all or part of their physical and non-physical assets, irrespective of legal or ownership titles. -

Friday 21 May 2021 MORNING Time of Issue: 0800 Hours IST ALL INDIA WEATHER SUMMARY and FORECAST BULLETIN
Friday 21 May 2021 MORNING Time of Issue: 0800 hours IST ALL INDIA WEATHER SUMMARY AND FORECAST BULLETIN Significant Weather Features ♦ A cyclonic circulation lies over central parts of south Uttar Pradesh & neighbourhood extending upto 3.1 km above mean sea level; the Western Disturbance as a trough in mid-tropospheric westerlies with its axis at 5.8 km above mean sea level runs roughly along longitude 75°E to the north of latitude 27°N. Under its influence: (i) Isolated to scattered rainfall/thunderstorm very likely over Uttarakhand, Uttar Pradesh and Bihar on 21st may. ♦ A Low Pressure Area is very likely to form over north Andaman Sea & adjoining eastcentral Bay of Bengal around 22nd May, 2021. It is very likely to intensify into a cyclonic storm by 24th May 2021. It very likely to move northwestwards and reach Odisha-West Bengal Coast around 26th May morning. ♦ Due to southerly/southwesterly winds from Bay of Bengal over northeast India and cyclonic circulation over Assam at lower levels, fairly widespread to widespread rainfall with isolated heavy rainfall very likely over Sub-Himalayan West Bengal & Sikkim, Arunachal Pradesh and Assam & Meghalaya on 21st May, 2021. Main Weather Observations ♦ Rain/Thundershowers observed (from 0830 to 1730 hours IST of yesterday): at most places over Uttarakhand, Uttar Pradesh, Bihar and Sub-Himalayan West Bengal & Sikkim; at isolated places over Jammu & Kashmir, Ladakh, Gilgit-Baltistan & Muzaffarabad, Himachal Pradesh, Madhya Pradesh, Jharkhand, Chhattisgarh, Arunachal Pradesh, Assam & Meghalaya, Tripura, south Konkan & Goa, Coastal Andhra Pradesh & Yanam, Coastal & South Interior Karnataka, Kerala& Mahe, Lakshadweep, Puducherry & Karaikal and Andaman & Nicobar Islands. -

Final Electoral Roll
FINAL ELECTORAL ROLL - 2021 STATE - (S12) MADHYA PRADESH No., Name and Reservation Status of Assembly Constituency: 17-GWALIOR Last Part SOUTH(GEN) No., Name and Reservation Status of Parliamentary Service Constituency in which the Assembly Constituency is located: 3-GWALIOR(GEN) Electors 1. DETAILS OF REVISION Year of Revision : 2021 Type of Revision : Special Summary Revision Qualifying Date :01/01/2021 Date of Final Publication: 15/01/2021 2. SUMMARY OF SERVICE ELECTORS A) NUMBER OF ELECTORS 1. Classified by Type of Service Name of Service No. of Electors Members Wives Total A) Defence Services 375 7 382 B) Armed Police Force 0 0 0 C) Foreign Service 1 0 1 Total in Part (A+B+C) 376 7 383 2. Classified by Type of Roll Roll Type Roll Identification No. of Electors Members Wives Total I Original Mother roll Integrated Basic roll of revision 377 7 384 2021 II Additions Supplement 1 After Draft publication, 2021 0 0 0 List Sub Total: 0 0 0 III Deletions Supplement 1 After Draft publication, 2021 1 0 1 List Sub Total: 1 0 1 Net Electors in the Roll after (I + II - III) 376 7 383 B) NUMBER OF CORRECTIONS/MODIFICATION Roll Type Roll Identification No. of Electors Supplement 1 After Draft publication, 2021 0 Total: 0 Elector Type: M = Member, W = Wife Page 1 Final Electoral Roll, 2021 of Assembly Constituency 17-GWALIOR SOUTH (GEN), (S12) MADHYA PRADESH A . Defence Services Sl.No Name of Elector Elector Rank Husband's Address of Record House Address Type Sl.No. Officer/Commanding Officer for despatch of Ballot Paper (1) (2) (3) (4) (5) (6) (7) Assam Rifles 1 BALRAJ SINGH M Rifleman Headquarter Directorate General 289 COMPHU Assam Rifles Record Branch GWALIYAR GWALIYAR Lathumkhrah Shillong 793011 GWALIOR 000000 GWALIAR Border Security Force 2 RAGHUBIR SINGH M CT DIG(STAFF) FHQ BSF BLOCK-10 KAMPOO GWALIOR , RAWAT , CGO COMPLEX NEW DELHI KAMPOO GWALIOR , PIN-110003 GWALIOR KAMPOO GWALIOR GWALIOR GWALIOR KAMPOO GWALIOR 474001 - 3 SUNIL KUMAR M CT 145BN BSF, SALBAGAN, PO. -

Brief Industrial Profile of Datia District
Contents S. No. Topic Page No. 1. General Characteristics of the District 03 1.1 Location & Geographical Area 03 1.2 Topography 03 1.3 Availability of Minerals. 04 1.4 Forest 04 1.5 Administrative set up 04 2. District at a glance 5-6 2.1 Existing Status of Industrial Area in the District Datiya 07 3. Industrial Scenario Of Datiya 07 3.1 Industry at a Glance 07 3.2 Year Wise Trend Of Units Registered 08 3.3 Details Of Existing Micro & Small Enterprises & Artisan Units In 09 The District 3.4 Large Scale Industries / Public Sector undertakings 10 3.5 Major Exportable Item 10 3.6 Growth Trend 10 3.7 Vendorisation / Ancillarisation of the Industry 10 3.8 Medium Scale Enterprises 10 3.8.1 List of the units in Datiya & near by Area 10 3.8.2 Major Exportable Item 10 3.9 Service Enterprises 10 3.9.2 Potentials areas for service industry 10 3.10 Potential for new MSMEs 11 4. Existing Clusters of Micro & Small Enterprise 11 4.1 Detail Of Major Clusters 11 5. General issues raised by industry association during the course of 11 meeting 6 Steps to set up MSMEs 12 Page 2 Brief Industrial Profile of Datia District 1. General Characteristics District Datia is the District headquarter of the Datia District. The town is 69 Km from Gwalior, 325 Km south of new Delhi and 320 Km north of Bhopal.It is an ancient town, mentioned in the mahabharata as Daityavakra. The town is a market centre for food grains and cotton products. -

National Legal Services Authority
NATIONAL LEGAL SERVICES AUTHORITY DIRECTORY OF LEGAL SERVICES INSTITUTIONS 12/11, Jam Nagar House, Shahjahan Road, New Delhi-110 011, www.nalsa.gov.in e-mail: [email protected] Off: 23385321, Fax: 23382121 INDEX S.No. States Page No. (s) 1 Andhra Pradesh 1 – 9 2 Arunachal Pradesh 10-12 3 Assam 13-15 4 Bihar 16-19 5 Chhattisgarh 20-25 6 Goa 26-27 7 Gujarat 28-46 8 Haryana 47-50 9 Himachal Pradesh 51-57 10 J & K 58-62 11 Jharkhand 63-65 12 Karnataka 66-85 13 Kerala 86-93 14 Madhya Pradesh 94-112 15 Maharashtra 113-136 16 Manipur 137-138 17 Meghalaya 139-140 18 Mizoram 141-142 19 Nagaland 143-144 20 Orissa 145-156 21 Punjab 157-160 22 Rajasthan 161-179 23 Sikkim 180-181 24 Tamil Nadu 182-203 25 Telangana 204-212 26 Tripura 213-215 27 Uttar Pradesh 216-219 28 Uttarakhand 220-223 29 West Bengal 224-230 30 Andaman & Nicobar 231-232 31 UT Chandigarh 233 32 Dadar & Nagar Haveli 234 33 Daman & Diu 234 34 Delhi 235-236 35 Lakshadweep 237 36 Puducherry 238 1 ANDHRA PRADESH STATE LEGAL SERVICES AUTHORITY State Legal Services Office address and Front Office Telephone Email Authority (SLSA) telephone numbers No./ Helpline No. Andhra Pradesh State Legal Ground Floor, Interim 0863 2372760 apslsauthority@yahoo. Services Authority Judicial Complex,High com Court of A.P. Nelapadu, Amaravati, Guntur District. 0863 2372758 0863 2372759 High Court Legal Services Office address and Front Office Telephone Email Committee (HCLSC) telephone numbers No./ Helpline No. -

List of WDRA Registered Warehouses As on 18-09-2019 Registration S
List of WDRA Registered Warehouses as on 18-09-2019 Registration S. No. State Name and Address Warehouseman Name Mobile Capacity WH Code Valid Upto Date CW Kadapa,CW Rims Road,Yerramukkapally, Kadapa , Distt- 1 ANDHRA PRADESH Central Warehousing Corporation 9535724444 25000 3030031 08-05-2018 07-05-2023 Y.S.R. CW Ongole,Central Warehouse, Throvagunta P.O.,Ongole , 2 ANDHRA PRADESH Central Warehousing Corporation 9535724444 10000 2390021 06-04-2018 05-04-2023 Distt-Prakasam CW Tadepalligudem,Nallajarla Road,Tadepalligudem , Distt- 3 ANDHRA PRADESH Central Warehousing Corporation 9535724444 72000 2350023 05-04-2018 04-04-2023 West Godavari 4 ANDHRA PRADESH CW, RENIGUNTA,Airport road,Renigunta, , Distt-Chittoor Central Warehousing Corporation 9535724444 20000 3950015 05-07-2018 04-07-2023 CW Ananthapur,C/O AP Oil fed,Tapovanam, Ananthapur , 5 ANDHRA PRADESH Central Warehousing Corporation 9535724444 7700 3270026 23-05-2018 22-05-2023 Distt-Anantapur APSWC, JAGGAIAHPET,BESIDE MARKET YARD,KODAD ROAD , ANDHRA PRADESH STATE 6 ANDHRA PRADESH 9849059571 9150 8551020 06-09-2019 05-09-2024 Distt-Krishna WAREHOUSING CORPORATION CW Vijayawada II,76-15-8,Opposite Out Agency. 7 ANDHRA PRADESH Central Warehousing Corporation 9535724444 15000 2810011 01-05-2018 30-04-2023 Bhavanipuram, Vijayawada , Distt-Krishna CW Nandikotkur,K.G Road,Beside Market Yard, Nandikotkur , 8 ANDHRA PRADESH Central Warehousing Corporation 9535724444 10000 2310022 02-04-2018 01-04-2023 Distt-Kurnool 9 ANDHRA PRADESH CW,KAKINADA,New port area, Kakinada, , Distt-East Godavari Central Warehousing Corporation 9535724444 30000 4010019 10-07-2018 09-07-2023 10 ANDHRA PRADESH CW Kaikalur,Atapaka, Kaikalur,Krishna Dist. -

Sq.Km.) Phuphkalan Total Population – 72 627 (In Thousand) Gormi Bhind Districts – 51 Akoda of MADHYA PRADESH Morena Mehgaon Tehsil – 367
74°10'0"E 75°11'0"E 76°12'0"E 77°13'0"E 78°14'0"E 79°15'0"E 80°16'0"E 81°17'0"E 82°18'0"E FACTS OF MADHYA PRADESH SH 2 UV UVS H URBAN LOCAL BODY MAP Ambah 2 Porsa Geographical Area – 308 (Thousand Sq.Km.) Phuphkalan Total Population – 72 627 (In Thousand) Gormi Bhind Districts – 51 Akoda OF MADHYA PRADESH Morena Mehgaon Tehsil – 367 UV S UV H S Bhind Blocks – 313 Gohad H 2 1 Jhundpura 9 ULB WISE AREA (Sq.Km) Joura Tribal Blocks – 89 Kailaras S.No. ULB Name Area(SQ.KM) S.No. ULB Name Area(SQ.KM) S.No. ULB Name Area(SQ.KM) Mihona Town (Census 2011) – 476 1 Agar 5.29 101 Dhamnod 13.10 201 Majholi 3.03 Mau 2 Ajaygarh 6.03 102 Dhamnod 14.40 202 Makdon 14.90 Sabalgarh 3 Akoda 1.28 103 Dhanpuri 20.90 203 Maksi 11.20 Gwalior Total Villages – 54903 4 Akodia 10.30 104 Dhar 24.80 204 Malanjkhand 81.20 N 23 Morena 5 Alampur 6.45 105 Dharampuri 4.26 205 Malhargarh 1.08 H Lahar S N " 6 Alirajpur 23.80 106 Dindori 10.30 206 Manasa 8.43 Nagar Nigam (July, 2015) – 16 UV " 7 Alot 3.57 107 Dongar Parasia 5.72 207 Manawar 9.57 Seondha 0 8 Amanganj 5.47 108 Gadarwara 18.50 208 Mandav 25.20 ' 9 Amarkantak 47.20 109 Gairatganj 12.70 209 Mandideep 56.80 0 Nagar Palika – 98 ' 0 10 Amarpatan 5.09 110 Ganj Basoda 6.58 210 Mandla 3.10 0 ° 11 Amarwara 11.80 111 Garhakota 3.32 211 Mandla 2.67 Vijaypur 9 12 Ambah 3.43 112 Garhi Malhera 20.00 212 Mandleshwar 1.09 1 Nagar Parishad – 272 ° H 6 Bilaua 13 Amla 4.81 113 Garoth 10.70 213 Mandsaur 34.50 Gwalior S 14 Anjad 8.17 114 Gohad 12.80 214 Mangawan 9.73 UV Daboh 6 2 15 Antari 5.49 115 Gormi 2.69 215 Manpur 4.25 Gram