Cranfield University Laszlo Hetey Idealisation Error
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ISIGHT Brochure
ISIGHT AUTOMATE DESIGN EXPLORATION AND OPTIMIZATION ISIGHT INDUSTRY CHALLENGES In today’s computer-aided product development and manufacturing environment, designers and engineers are using a wide range of KEY BENEFITS software tools to design and simulate their products. Often, the • Reduce time and costs parameters and results from one software package are required as • Improve product reliability inputs to another package, and the manual process of entering the required data can reduce efficiency, slow product development, and • Gain competitive advantage introduce errors in modeling and simulation assumptions. SIMULIA’s Isight Solution Isight provides designers, engineers, and researchers with an open system for integrating design and simulation models—created with various CAD, CAE, and other software applications—to automate the execution of hundreds or thousands of simulations. Isight allows users to save time and improve their products by optimizing them against performance or cost metrics through statistical methods, such as Design of Experiments (DOE) or Design for Six Sigma. Isight combines cross-disciplinary models and applications together in a simulation process flow, automates their execution, explores the resulting design space, and identifies the optimal design Isight parameters based on required constraints. Isight’s ability to manipulate and map parametric data between process steps and automate multiple simulations greatly improves efficiency, reduces manual errors, and accelerates the evaluation of product design alternatives. Open Component Framework Isight provides a standard library of components— including Excel™, Word™, CATIA V5™, Dymola™, MATLAB®, COM, Text I/O applications, Java and Python Scripting, and databases—for integrating and running a model or simulation. These components form the building blocks of simulation process flows. -

AALTO UNIVERSITY School of Engineering Engineering Design and Production
AALTO UNIVERSITY School of Engineering Engineering Design and Production Kaur Jaakma Engineering Data Management Thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Technology Espoo, 29 December 2011 Supervisor: Professor (pro tem) Jari Juhanko Instructor: Andrea Buda, M.Sc. AALTO UNIVERSITY ABSTRACT OF THE MASTER’S THESIS SCHOOLS OF TECHNOLOGY PO Box 11000, FI-00076 AALTO http://www.aalto.fi Author: Kaur Jaakma Title: Engineering Data Management School: School of Engineering Department: Department of Engineering Design and Production Professorship: Machine Design Code: Kon-41 Supervisor: Professor (pro tem) Jari Juhanko Instructor: Andrea Buda, M. Sc. Abstract: To support design decisions in the product development process, companies are increasingly relying on computer aided simulations. However, investments in simulation technologies can not translate directly into benefit without implementing a system able to capture knowledge and value out of each simulation performed. To implement the switch from traditional product development to Simulation Based Design (SBD) and product development, a system that can efficiently manage simulation data is needed. Common situation in industry is to store everything related to simulations in the analyst’s computer or in a shared folder. Currently only CAE (Computer Aided Engineering) departments in aerospace and automotive OEMs are early adopters of SDM (Simulation Data Management) technology. Commercial SDM systems are developed to suits the needs of big enterprises with repetitive processes and product with broadly similar geometries. The cost for deployment and maintenance of this kind of system represents a barrier for small and mid-size companies. The larger companies might not benefit from a system developed and tuned for the needs of the early adopters mentioned above. -

Development of a Coupling Approach for Multi-Physics Analyses of Fusion Reactors
Development of a coupling approach for multi-physics analyses of fusion reactors Zur Erlangung des akademischen Grades eines Doktors der Ingenieurwissenschaften (Dr.-Ing.) bei der Fakultat¨ fur¨ Maschinenbau des Karlsruher Instituts fur¨ Technologie (KIT) genehmigte DISSERTATION von Yuefeng Qiu Datum der mundlichen¨ Prufung:¨ 12. 05. 2016 Referent: Prof. Dr. Stieglitz Korreferent: Prof. Dr. Moslang¨ This document is licensed under the Creative Commons Attribution – Share Alike 3.0 DE License (CC BY-SA 3.0 DE): http://creativecommons.org/licenses/by-sa/3.0/de/ Abstract Fusion reactors are complex systems which are built of many complex components and sub-systems with irregular geometries. Their design involves many interdependent multi- physics problems which require coupled neutronic, thermal hydraulic (TH) and structural mechanical (SM) analyses. In this work, an integrated system has been developed to achieve coupled multi-physics analyses of complex fusion reactor systems. An advanced Monte Carlo (MC) modeling approach has been first developed for converting complex models to MC models with hybrid constructive solid and unstructured mesh geometries. A Tessellation-Tetrahedralization approach has been proposed for generating accurate and efficient unstructured meshes for describing MC models. For coupled multi-physics analyses, a high-fidelity coupling approach has been developed for the physical conservative data mapping from MC meshes to TH and SM meshes. Interfaces have been implemented for the MC codes MCNP5/6, TRIPOLI-4 and Geant4, the CFD codes CFX and Fluent, and the FE analysis platform ANSYS Workbench. Furthermore, these approaches have been implemented and integrated into the SALOME simulation platform. Therefore, a coupling system has been developed, which covers the entire analysis cycle of CAD design, neutronic, TH and SM analyses. -

Dassault Systèmes Annual Report 2018 1 General
NOUSWE 2018 SOMMESARE Financial report THERELÀ CONTENTS General 2 Person Responsible 3 15Presentation of the Group 5 Corporate governance 167 1.1 Profile of Dassault Systèmes 6 5.1 The Board’s Corporate Governance Report 168 1.2 Financial Summary: A Long History 5.2 Internal Control Procedures and Risk Management 203 of Sustainable Growth 7 5.3 Transactions in Dassault Systèmes shares 1.3 History 9 by the Management of the Company 207 1.4 Group Organization 14 5.4 Statutory Auditors 210 1.5 Business Activities 15 5.5 Declarations regarding the administrative Bodies 1.6 Research and development 29 and Senior Management 210 1.7 Risk factors 31 Information about Social, societal and environmental 6 Dassault Systèmes SE, the share capital 2 responsibility 39 and the ownership structure 211 6.1 Information about Dassault Systèmes SE 212 2.1 Social responsibility 41 6.2 Information about the Share Capital 216 2.2 Societal responsibility 48 6.3 Information about the Shareholders 219 2.3 Environmental Responsibility 53 6.4 Stock Market Information 224 2.4 Business Ethics and Vigilance Plan 58 2.5 Reporting methodology 61 2.6 Independent Verifier’s Report on Consolidated Non- General Meeting 225 financial Statement Presented in the Management 7 Report 64 7.1 Presentation of the resolutions proposed by the 2.7 Statutory Auditors’ Attestation on the information Board of Directors to the General Meeting on relating to the Dassault Systèmes SE’s total amount May 23, 2019 226 paid for sponsorship 67 7.2 Text of the draft resolutions proposed by the -

Simulia Community News
SIMULIA COMMUNITY NEWS #08 October 2014 THE POWER OF THE PORTFOLIO COVER STORY SIMULATION HELPS UPGRADE LONDON TUNNELS in this Issue October 2014 3 Welcome Letter Scott Berkey, Chief Executive Officer, SIMULIA 4 Portfolio Update Latest SIMULIA Portfolio Releases Deliver Powerful, Advanced Simulation Functionality to Users 8 Strategy Overview DR. SAUER How to Stay at the Top of Your Game in the Fast-Evolving 10 World of Simulation 10 Cover Story Dr. Sauer and Partners Helps Upgrade London Underground Station 13 News SIMPACK Joins the Dassault Systèmes Family 14 Case Study Stadler Rail Simulates Train Safety with FEA 17 Alliances Topology and Shape Optimization Using the Tosca-Ansa Environment 18 Case Study Fine-tuning the Anatomy of Car-Seat Comfort STADLER 20 Academic Update 14 Oil & Gas Subsurface Innovation with Multiphysics Simulations 22 Tips & Tricks Optimization Module Within Abaqus/CAE Contributors: Dr. Alois Starlinger (Stadler Rail), Dr. Alexander Siefert (Wölfel Group), Jeremy Brown and Randi Jean Walters (Stanford University), Parker Group On the Cover: Ali Nasekhian, Dr. techn., M.Sc. Senior Tunnel Engineer, Dr. Sauer and Partners Cover photo by Roger Brown Photography WÖLFEL 18 SIMULIA Community News is published by Dassault Systèmes Simulia Corp., Rising Sun Mills, 166 Valley Street, Providence, RI 02909-2499, Tel. +1 401 276 4400, Fax. +1 401 276 4408, [email protected], www.3ds.com/simulia Editor: Tad Clarke Associate Editor: Kristina Hines Graphic Designer: Todd Sabelli ©2014 Dassault Systèmes. All rights reserved. 3DEXPERIENCE, the Compass icon and the 3DS logo, CATIA, SOLIDWORKS, ENOVIA, DELMIA, SIMULIA, GEOVIA, EXALEAD, 3D VIA, BIOVIA, NETVIBES, and 3DXCITE are commercial trademarks or registered trademarks of Dassault Systèmes or its subsidiaries in the U.S. -
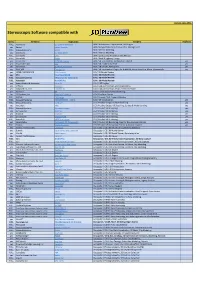
Stereo Software List
Version: June 2021 Stereoscopic Software compatible with Stereo Company Application Category Duplicate FULL Xeometric ELITECAD Architecture BIM / Architecture, Construction, CAD Engine yes Bexcel Bexcel Manager BIM / Design, Data, Project & Facilities Management FULL Dassault Systems 3DVIA BIM / Interior Modeling yes Xeometric ELITECAD Styler BIM / Interior Modeling FULL SierraSoft Land BIM / Land Survey Restitution and Analysis FULL SierraSoft Roads BIM / Road & Highway Design yes Xeometric ELITECAD Lumion BIM / VR Visualization, Architecture Models yes yes Fraunhofer IAO Vrfx BIM / VR enabled, for Revit yes yes Xeometric ELITECAD ViewerPRO BIM / VR Viewer, Free Option yes yes ENSCAPE Enscape 2.8 BIM / VR Visualization Plug-In for ArchiCAD, Revit, SketchUp, Rhino, Vectorworks yes yes OPEN CASCADE CAD CAD Assistant CAx / 3D Model Review yes PTC Creo View MCAD CAx / 3D Model Review FULL Dassault Systems eDrawings for Solidworks CAx / 3D Model Review FULL Autodesk NavisWorks CAx / 3D Model Review yes Robert McNeel & Associates. Rhino (5) CAx / CAD Engine yes Softvise Cadmium CAx / CAD, Architecture, BIM Visualization yes Gstarsoft Co., Ltd HaoChen 3D CAx / CAD, Architecture, HVAC, Electric & Power yes Siemens NX CAx / Construction & Manufacturing Yes 3D Systems, Inc. Geomagic Freeform CAx / Freeform Design FULL AVEVA E3D Design CAx / Process Plant, Power & Marine FULL Dassault Systems 3DEXPERIENCE - CATIA CAx / VR Visualization yes FULL Dassault Systems ICEM Surf CGI / Product Design, Surface Modeling yes yes Autodesk Alias CGI / Product -

Book of Abstracts
Book of abstracts 9th PhD Seminar on Wind Energy in Europe September 18-20, 2013 Uppsala University Campus Gotland, Sweden Campus Gotland WIND ENERGY Book of abstracts of 9th PhD Seminar on Wind Energy in Europe Uppsala University Campus Gotland, Sweden Campus Gotland, Wind Energy 621 67 Visby PREFACE The wind energy field is becoming more and more important in relation with future challenges of switching the world energy system to renewables. Therefore it is of high importance that tomorrow’s researchers in the field from all over the word meet and discuss future challenges. The 9th annual EAWE PhD seminar is in 2013 organized by Uppsala University Campus Gotland. This is a very suitable place for this event since it combines a unique historical environment with a sustainable profile and a long tradition of wind energy. Today about 45% of the energy consumption is locally produced by wind energy. Uppsala University Campus Gotland also has more than 10 years experience of teaching and research in the field with a focus on wind power project development. The aim with this seminar is to improve the international communication and information sharing of ongoing activities as well as simplify contact building between young researchers. It is also a perfect opportunity for PhD students to practice and improve their presentation and discussion skills. Associate Professor Stefan Ivanell Director, Wind Energy Uppsala University, Campus Gotland Book of abstracts of 9th PhD Seminar on Wind Energy in Europe September 18-20, 2013, Uppsala University Campus Gotland, Sweden TABLE OF CONTENTS ROTOR & WAKE AERODYNAMICS UNDERSTANDING THE WIND TURBINE BREAKDOWN MECHANISM WITH CFD M. -

Developing Downhole Oil and Gas Drilling Products Faster with Simuliaworks
DEVELOPING DOWNHOLE OIL AND GAS DRILLING PRODUCTS FASTER WITH SIMULIAWORKS By adding SIMULIAworks to its SOLIDWORKS product development implementation, InFocus Energy Services has acquired the simulation power and efficiency that it needs to consistently develop innovative, effective downhole products for the oil and gas industry more quickly and affordably. Challenge: launching a new 3DEXPERIENCE® simulation solution that Leverage high-end, nonlinear structural incorporated the SIMULIA® Abaqus solver, we signed up for simulation technology to reduce reliance on the Lighthouse Program so we could start using the new costly, time-consuming physical testing and SIMULIAworks immediately. As soon as we got our hands on develop innovative downhole drilling products it, we started testing it and benchmarking it against known test results.” more quickly and cost-effectively. SIMULATING TRICKY, COMPLEX CONTACT ACCURATELY Solution: Add SIMULIAworks to its SOLIDWORKS InFocus first utilized SIMULIAworks on the bearing section implementation to conduct nonlinear structural of the company’s RE|FLEX Premium HP/HT Drilling Motor. The motor’s bearing section is a proprietary design that was and complex contact analyses in the cloud developed to convert extreme loading parameters, including to advance and accelerate new product torque of over 30,000 foot-pounds, into efficient drilling action. development. The company’s initial concept design of the drive system, which utilized traditional ball bearings, resulted in failure during Results: testing when the load crushed the bearings and the faces that • Saved tens of thousands of dollars in testing costs load the bearings. SIMULIAworks predicted the failure—with • Cut months of time and extra labor from accurate correlation to actual test results—and helped the development process company develop a better, more innovative design. -

NX Advanced Simulation
NX NX Advanced Simulation fact sheet Siemens PLM Software www.siemens.com/nx Summary NX™ Advanced Simulation software combines the power of an integrated NX Nastran® desktop solver with NX Advanced FEM, a comprehensive suite of multi-CAD FE model creation and results visualization tools. Extensive geometry creation, idealization and abstraction capabilities enable the rapid development of complex 3D mathematical models that allow design decisions to be based on insight into real product performance. NX Advanced Simulation enables a true multi-physics environment via tight integration with NX Nastran as well as other industry standard solvers such as Abaqus, Ansys, MSC Nastran and LS-Dyna. Benefits NX Advanced FEM includes the fundamental modeling functions of automatic and manual mesh Build models faster with embedded generation, application of loads and boundary conditions and model development and checking. NX tools for 3D geometry creation, Advanced FEM includes Assembly FEM technology, a distributed model approach to handle large editing and abstraction FEM assemblies. A robust set of visualization tools generates displays quickly, lets you view multiple Make design changes easily with results simultaneously and enables you to easily print the display. In addition, extensive post- Synchronous Technology for quick what-if analysis processing functions enable review and export of analysis results to spreadsheets and provide Enable faster collaboration between extensive graphing tools for gaining an understanding of results. Post-processing also supports analysts and design engineers with the export of JT™ data for collaboration across the enterprise with JT2Go and Teamcenter® for geometry associativity lifecycle visualization software. •Knowledge of design changes •“On-demand” FE model updates NX Advanced FEM provides seamless, transparent based on design geometry support for a number of industry-standard changes solvers, such as NX Nastran, MSC Nastran, Manage and share your CAE data Ansys and Abaqus. -
Simulation Lifecycle Management Manage & Secure Simulation Intellectual Property 3DS.COM/SIMULIA SIMULIA SLM
Simulation Lifecycle Management Manage & Secure Simulation Intellectual Property 3DS.COM/SIMULIA SIMULIA SLM Industry Challenges In the manufacturing industry, design analysis technology and related methods are being used to create innovative and reliable products while reducing time and costs. However, even those companies gaining significant benefits from simulation will admit that they often fail to capture their simulation processes or Capture best practices manage the results in a manner that allows effective knowledge reuse or decision-making traceability. Reuse intellectual property SIMULIA Solutions Improve process quality SIMULIA Simulation Lifecycle Management (SLM) solutions simplify the capture and deployment of approved simulation methods and best practices, providing guidance and improved confidence in the use of simulation results for collaborative decision making. Users can improve product quality with fully traceable simulation history and associated data. SLM also accelerates product development by providing timely access to the right information through secure storage, search and retrieval with distinct functionality dedicated specifically to simulation scenarios and data. rt po up P S ro n c io e s s i s c e M D a n a g e m Collaboration e n t D a ta M an agement Improve your simulation data and process quality The SIMULIA SLM solution portfolio, includes Scenario Definition, Live Simulation Review, Isight, and the SIMULIA Execution Engine. Scenario Definition enables methods developers to create workflow-specific simulation templates incorporating their company’s best practices while using the simulation tools of their choosing. These templates can then be deployed to a wide range of users ensuring adherence to standard practices in order to improve repeatability, reliability and confidence in simulations. -

2020 Universal Registration Document
2020 2018/2019/2020 Universal Registration Document CONTENTS General 2 Person Responsible 3 1 Presentation of the Company 5 4 Financial statements 105 2020 Performance and Strategy 6 4.1 Consolidated Financial Statements 106 1.1 Key data 8 4.2 Parent company financial statements 153 1.2 Profile of Dassault Systèmes & Our Purpose 10 4.3 Legal and Arbitration Proceedings 184 1.3 History and Development of the Company 13 1.4 Business Activities 18 Corporate governance 185 1.5 Research and development 31 5 1.6 Company Organization 34 5.1 The Board’s Corporate Governance Report 186 1.7 Financial Summary: five-year historical information 36 5.2 Internal Control Procedures and Risk Management 229 1.8 Extra-financial performance 38 5.3 Transactions in Dassault Systèmes shares by the 1.9 Risk Factors 39 Management of Dassault Systèmes 233 5.4 Information on the Statutory Auditors 237 5.5 Declarations regarding the administrative Social, societal and environmental and management bodies 237 2 responsibility 47 2.1 Sustainability Governance 49 Information about 2.2 Social, societal and environmental risks 49 6 Dassault Systèmes SE, the share capital 2.3 Social responsibility 50 and the ownership structure 239 2.4 Societal responsibility 56 6.1 Information about Dassault Systèmes SE 240 2.5 Environmental responsibility 61 6.2 Information about the Share Capital 244 2.6 Business Ethics and Vigilance Plan 67 6.3 Information about the Shareholders 247 2.7 Environmental, Social and Governance metrics 74 6.4 Stock Market Information 253 2.8 Reporting Methodology -

NX Advanced Simulation Integrating FE Modeling and Simulation Streamlines Product Development Process
Siemens PLM Software NX Advanced Simulation Integrating FE modeling and simulation streamlines product development process Benefits A modern CAE environment unique from all other finite element (FE) • Speed simulation processes NX™ Advanced Simulation software is a preprocessors is its superior geometry by up to 70 percent modern, multidiscipline computer-aided foundation that enables intuitive geometry engineering (CAE) environment for editing and analysis model associativity to • Perform accurate, reliable advanced analysts, workgroups and design- multi-computer-aided design (CAD) data. structural analysis with ers that need to deliver high-quality perfor- The tight integration of a powerful geome- integrated NX Nastran mance insights in a timely fashion to drive try engine with robust analysis modeling solver product decisions. NX Advanced Simulation commands is the key to reducing modeling • Increase product quality by integrates best-in-class analysis modeling time by up to 70 percent compared to rapidly simulating design with the power of an integrated NX traditional FE modeling tools. tradeoff studies Nastran® desktop solver for basic structural Enabling fast, intuitive geometry editing analysis. NX Advanced Simulation also • Lower overall product NX Advanced Simulation is built on the forms the foundation on which you can development costs by same leading geometry foundation that perform additional solutions for advanced reducing costly, late design powers NX. By using NX Advanced structural, thermal, flow, engineering opti- change