Ferrites and Accessories
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Ferrite / Ceramic Data Sheet
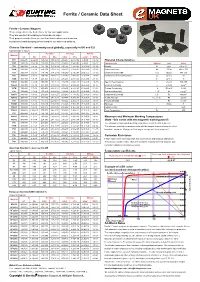
Ferrite / Ceramic Data Sheet Ferrite / Ceramic Magnets These magnets are the best choice for low cost applications. They are excellent at resisting corrosion due to water. Their properties make them an excellent choice when used in motors, loudspeakers and clamping devices and for use with reed switches. Chinese Standard - commonly used globally, especially in UK and EU Typical Range of Values Br Hc (Hcb) Hci (Hcj) BHmax Material mT kG kA/m kOe kA/m kOe kJ/m3 MGOe Y8T 200-235 2.0-2.35 125-160 1.57-2.01 210-280 2.64-3.52 6.5-9.5 0.8-1.2 Physical Characteristics Y10T 200-235 2.0-2.35 128-160 1.61-2.01 210-280 2.64-3.52 6.4-9.6 0.8-1.2 Characteristic Symbol Unit Value Y20 320-380 3.2-3.8 135-190 1.70-2.39 140-195 1.76-2.45 18.0-22.0 2.3-2.8 Density D g/cc 4.9 to 5.1 Y22H 310-360 3.1-3.6 220-250 2.76-3.14 280-320 3.52-4.02 20.0-24.0 2.5-3.0 Vickers Hardness Hv D.P.N 400 to 700 Y23 320-370 3.2-3.7 170-190 2.14-2.39 190-230 2.39-2.89 20.0-25.5 2.5-3.2 Compression Strength C.S N/mm2 680-720 Y25 360-400 3.6-4.0 135-170 1.70-2.14 140-200 1.76-2.51 22.5-28.0 2.8-3.5 Coefficient of Thermal Expansion C// 10-6/C 15 Y26H 360-390 3.6-3.9 220-250 2.76-3.14 225-255 2.83-3.20 23.0-28.0 2.9-3.5 C^ 10-6/C 10 Y26H-1 360-390 3.6-3.9 200-250 2.51-3.14 225-255 2.83-3.20 23.0-28.0 2.9-3.5 Specific Heat Capacity c J/kg°C 795-855 Y26H-2 360-380 3.6-3.8 263-288 3.30-3.62 318-350 4.00-4.40 24.0-28.0 3.0-3.5 Electrical Resistivity r m Ω.cm 1x1010 Y27H 370-400 3.7-4.0 205-250 2.58-3.14 210-255 2.64-3.20 25.0-29.0 3.1-3.6 Thermal Conductivity k W/cm°C 0.029 Y28 370-400 3.7-4.0 175-210 2.20-2.64 180-220 2.26-2.76 26.0-30.0 3.3-3.8 Modulus of Elasticity l / E Pa 1.8x1011 Y28H-1 380-400 3.8-4.0 240-260 3.02-3.27 250-280 3.14-3.52 27.0-30.0 3.4-3.8 Compression Strength C.S. -

A TWO DIMENSIONAL FERRITE-CORE MEMORY Bv M
A TWO DIMENSIONAL FERRITE-CORE MEMORY Bv M. M. FAROOQUI, S. P. SKiVASTAVA AND R. N. NEOGI (Tata Institute of Fundamental Research, Bomba),) Received January t0, 1957 (Communicated by Prof. Bernard P ABS'IXACT This paper describes a two dimensional matrix memory using ferrite- cores. A urtit consisting of 100 words of I 1 binary digits each has been cortstructed for parallel operation. The word drive is from a biasr switch-core matrix, while the digit drive makes use of pulse--trans- formers. Logic and circuit techniques enable high discrimination bet- ween wanted and unwanted signals. A semi-automatic method for testing the memory cores is also described. INTRODUCTION THE potentiality of magnetie fer¡ with a rectangular hysteresis loop as binary storage elements for digital computer was realised earlier by Forrester. x Later, Papian% s and almost simultaneously Rajchman4, ~ showed the practicability of such a system by successfully operating memories of fairly large capacity. This paper describes a modest attempt in this direction. A memory of I00 words, 11 bits each, has beca constructed to operate with a smaU digital computer at the Tata institute of Fundamental Research, Bombay. THE PRINClPLE OF OPERATION OF THE MEMORY The two stable states required for sto¡ binary information in magnetic cores ate the states of positive and negative magnetisation. These are the states corresponding to the position A0 and Ax on the hysteresis loop and can be termed as the 0- and the 1-states respectively (Fig. 2). Con- sider a number of sucia cores with ah ideaUy rectangular hysteresis character- istic, arranged in rows and columns in the form of a matrix. -
Selecting the Optimal Inductor for Power Converter Applications
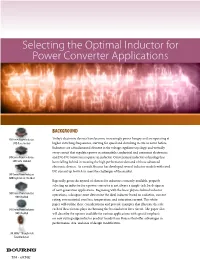
Selecting the Optimal Inductor for Power Converter Applications BACKGROUND SDR Series Power Inductors Today’s electronic devices have become increasingly power hungry and are operating at SMD Non-shielded higher switching frequencies, starving for speed and shrinking in size as never before. Inductors are a fundamental element in the voltage regulator topology, and virtually every circuit that regulates power in automobiles, industrial and consumer electronics, SRN Series Power Inductors and DC-DC converters requires an inductor. Conventional inductor technology has SMD Semi-shielded been falling behind in meeting the high performance demand of these advanced electronic devices. As a result, Bourns has developed several inductor models with rated DC current up to 60 A to meet the challenges of the market. SRP Series Power Inductors SMD High Current, Shielded Especially given the myriad of choices for inductors currently available, properly selecting an inductor for a power converter is not always a simple task for designers of next-generation applications. Beginning with the basic physics behind inductor SRR Series Power Inductors operations, a designer must determine the ideal inductor based on radiation, current SMD Shielded rating, core material, core loss, temperature, and saturation current. This white paper will outline these considerations and provide examples that illustrate the role SRU Series Power Inductors each of these factors plays in choosing the best inductor for a circuit. The paper also SMD Shielded will describe the options available for various applications with special emphasis on new cutting edge inductor product trends from Bourns that offer advantages in performance, size, and ease of design modification. -
Powder Material for Inductor Cores Evaluation of MPP, Sendust and High flux Core Characteristics Master of Science Thesis
Powder Material for Inductor Cores Evaluation of MPP, Sendust and High flux core characteristics Master of Science Thesis JOHAN KINDMARK FREDRIK ROSEN´ Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2013 Powder Material for Inductor Cores Evaluation of MPP, Sendust and High flux core characteristics JOHAN KINDMARK FREDRIK ROSEN´ Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2013 Powder Material for Inductor Cores Evaluation of MPP, Sendust and High flux core characteristics JOHAN KINDMARK FREDRIK ROSEN´ c JOHAN KINDMARK FREDRIK ROSEN,´ 2013. Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology SE–412 96 G¨oteborg Sweden Telephone +46 (0)31–772 1000 Chalmers Bibliotek, Reproservice G¨oteborg, Sweden 2013 Powder Material for Inductor Cores Evaluation of MPP, Sendust and High flux core characteristics JOHAN KINDMARK FREDRIK ROSEN´ Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology Abstract The aim of this thesis was to investigate the performanceof alternative powder materials and compare these with conventional iron and ferrite cores when used as inductors. Permeability measurements were per- formed where both DC-bias and frequency were swept, the inductors were put into a small buck converter where the overall efficiency was measured. The BH-curve characteristics and core loss of the materials were also investigated. The materials showed good performance compared to the iron and ferrite cores. High flux had the best DC-bias characteristics while Sendust had the best performance when it came to higher fre- quencies and MPP had the lowest core losses. -

Magnetics Design for Switching Power Supplies Lloydh
Magnetics Design for Switching Power Supplies LloydH. Dixon Section 1 Introduction Experienced SwitchMode Power Supply design- ers know that SMPS success or failure depends heav- ily on the proper design and implementation of the magnetic components. Parasitic elements inherent in high frequency transformers or inductors cause a va- riety of circuit problems including: high losses, high voltage spikes necessitating snubbers or clamps, poor cross regulation between multiple outputs, noise cou- pling to input or output, restricted duty cycle range, Figure 1-1 Transformer Equivalent Circuit etc. Figure I represents a simplified equivalent circuit of a two-output forward converter power transformer, optimized design, (3) Collaborate effectively with showing leakage inductances, core characteristics experts in magnetics design, and possibly (4) Become including mutual inductance, dc hysteresis and satu- a "magnetics expert" in his own right. ration, core eddy current loss resistance, and winding Obstacles to learning magnetics design distributed capacitance, all of which affect SMPS In addition to the lack of instruction in practical performance. magnetics mentioned above, there are several other With rare exception, schools of engineering pro- problems that make it difficult for the SMPS designer vide very little instruction in practical magnetics rele- to feel "at home" in the magnetics realm: vant to switching power supply applications. As a .Archaic concepts and practices. Our great- result, magnetic component design is usually dele- grandparents probably had a better understanding gated to a self-taught expert in this "black art". There of practical magnetics than we do today. Unfor- are many aspects in the design of practical, manu- tunately, in an era when computation was diffi- facturable, low cost magnetic devices that unques- cult, our ancestors developed concepts intended tionably benefit from years of experience in this field. -

Electromagnets and Their Applications
International Journal of Industrial Electronics and Electrical Engineering, ISSN(p): 2347-6982, ISSN(e): 2349-204X Volume-5, Issue-8, Aug.-2017, http://iraj.in ELECTROMAGNETS AND THEIR APPLICATIONS SHAHINKARIMAGHAIE Bachelor of Electrical Engineering, Yazd Branch, Islamic Azad University, Yazd, Iran E-mail: [email protected] Abstract- Electric current flowing through a wire wound around an iron nail creates a magnetic field, which caused an iron nail to become a temporary magnet. The nail can then be used to pick up paper clips. When the electric current is cut off, the nail loses its magnetic property and the paper clips fall off. The students will make an elecromagnet that will attract a paper clip. They will then increase the strength of an electromagnet(improve on their initial design) so that it will attract an increased number of paper clips. The participants will also compare the properties of magnets and electromagnets. However, unlike a permanent magnet that needs no power, an electromagnet requires a continuous supply of current to maintain the magnetic field. Electromagnets are widely used as components of other electrical devices, such as motors. Electromagnets are also employed in industry for picking up and moving heavy iron objects such as scrap iron and steel. We will investigate engineering and industrial applications of the case study. Keywords- Electromagnet, Application, Engineering. I. INTRODUCTION William Sturgeon. If you have ever played with a really powerful magnet, you have probably noticed Electromagnet, device in which magnetism is one problem. You have to be pretty strong to separate produced by an electric current. Any electric current the magnets again! Today, we have many uses for produces a magnetic field, but the field near an powerful magnets, but they wouldn’t be any good to ordinary straight conductor is rarely strong enough to us if we were not able to make them release the be of practical use. -

Effective Permeability of Multi Air Gap Ferrite Core 3-Phase
energies Article Effective Permeability of Multi Air Gap Ferrite Core 3-Phase Medium Frequency Transformer in Isolated DC-DC Converters Piotr Dworakowski 1,* , Andrzej Wilk 2 , Michal Michna 2 , Bruno Lefebvre 1, Fabien Sixdenier 3 and Michel Mermet-Guyennet 1 1 Power Electronics & Converters, SuperGrid Institute, 69100 Villeurbanne, France; [email protected] (B.L.); [email protected] (M.M.-G.) 2 Faculty of Electrical and Control Engineering, Gda´nskUniversity of Technology, 80-233 Gdansk, Poland; [email protected] (A.W.); [email protected] (M.M.) 3 Univ Lyon, Université Claude Bernard Lyon 1, INSA Lyon, ECLyon, CNRS, Ampère, 69100 Villeurbanne, France; [email protected] * Correspondence: [email protected] Received: 4 February 2020; Accepted: 11 March 2020; Published: 14 March 2020 Abstract: The magnetizing inductance of the medium frequency transformer (MFT) impacts the performance of the isolated dc-dc power converters. The ferrite material is considered for high power transformers but it requires an assembly of type “I” cores resulting in a multi air gap structure of the magnetic core. The authors claim that the multiple air gaps are randomly distributed and that the average air gap length is unpredictable at the industrial design stage. As a consequence, the required effective magnetic permeability and the magnetizing inductance are difficult to achieve within reasonable error margins. This article presents the measurements of the equivalent B(H) and the equivalent magnetic permeability of two three-phase MFT prototypes. The measured equivalent B(H) is used in an FEM simulation and compared against a no load test of a 100 kW isolated dc-dc converter showing a good fit within a 10% error. -

Magnetics in Switched-Mode Power Supplies Agenda
Magnetics in Switched-Mode Power Supplies Agenda • Block Diagram of a Typical AC-DC Power Supply • Key Magnetic Elements in a Power Supply • Review of Magnetic Concepts • Magnetic Materials • Inductors and Transformers 2 Block Diagram of an AC-DC Power Supply Input AC Rectifier PFC Input Filter Power Trans- Output DC Outputs Stage former Circuits (to loads) 3 Functional Block Diagram Input Filter Rectifier PFC L + Bus G PFC Control + Bus N Return Power StageXfmr Output Circuits + 12 V, 3 A - + Bus + 5 V, 10 A - PWM Control + 3.3 V, 5 A + Bus Return - Mag Amp Reset 4 Transformer Xfmr CR2 L3a + C5 12 V, 3 A CR3 - CR4 L3b + Bus + C6 5 V, 10 A CR5 Q2 - + Bus Return • In forward converters, as in most topologies, the transformer simply transmits energy from primary to secondary, with no intent of energy storage. • Core area must support the flux, and window area must accommodate the current. => Area product. 4 3 ⎛ PO ⎞ 4 AP = Aw Ae = ⎜ ⎟ cm ⎝ K ⋅ΔB ⋅ f ⎠ 5 Output Circuits • Popular configuration for these CR2 L3a voltages---two secondaries, with + From 12 V 12 V, 3 A a lower voltage output derived secondary CR3 C5 - from the 5 V output using a mag CR4 L3b + amp postregulator. From 5 V 5 V, 10 A secondary CR5 C6 - CR6 L4 SR1 + 3.3 V, 5 A CR8 CR7 C7 - Mag Amp Reset • Feedback to primary PWM is usually from the 5 V output, leaving the +12 V output quasi-regulated. 6 Transformer (cont’d) • Note the polarity dots. Xfmr CR2 L3a – Outputs conduct while Q2 is on. -

Ferrite and Metal Composite Inductors
Ferrite and Metal Composite Inductors Design and Characteristics © 2019 KEMET Corporation What is an Inductor? Coil Magnetic Magnetic flux φ (Wire) Field dφ Core e = - dt Material i The coil converts electric energy into magnetic energy and stores it. e Core Material Current through the coil of wire creates a magnetic field Air Ferrite Metal and stores it. (None) (Iron) Composite Different core materials change magnetic field strength. © 2019 KEMET Corporation Ferrite Inductor or Metal Composite Inductor? Ferrite InductorFerrite Metal InductorMetal Composite MaterialMaterial Type type Ni-ZnNi-Zn Mn-Zn Mn-Zn Fe based Fe Based Very Good!! No Good.. InductanceInductace GoodGood! Very Good No Good Very Good!! Magnetic Saturation Good! No Good.. Good! No Good.. Very Good!! MagneticThermal Saturation Property Good No Good Very Good Good! Very Good!! Good! Efficiency Very Good!! No Good.. Good! ThermalResistance Property of core Good No Good Very Good Efficiency SBC/SBCPGood TPI Very GoodMPC, MPCV Good Products MPLC, MPLCV Resistance of Core Very Good No Good Good © 2019 KEMET Corporation Ferrite and Metal Composite Comparison Advantage of Ferrite 1. Higher inductance with high permeability 2. Stable inductance in the right range High L and Low DCR capability Advantage of Metal Composite 1. Very slow saturation 2. Very stable saturation for the thermal Core Loss Comparison Good for Auto app especially Advantage of Ferrite Very low core loss in dynamic frequency range Mn-Zn Ferrite Metal Core Low power consumption capability © 2019 KEMET Corporation -
Switch Mode Power Supplies and Their Magnetics Tutorial
Datatronic Switch Mode Power Supplies and their Magnetics Many factors must be considered by designers when choosing the magnetic components required in today’s electronic power supplies DATATRONIC DISTRIBUTION, INC. Datatronic In today’s day and age the most often used topology for electronic power supplies is that of the Switch Mode Power Supply (SMPS), which is a major user of magnetics. In some applications the “older type” linear supplies are still used, but in the early 70’s SMPS came into being spurred by the development of faster switching transistors. This facilitated the use of much smaller magnetic components and greater efficiencies. DATATRONIC DISTRIBUTION, INC. Datatronic SMPS and their General Magnetic Usage In general, there are four different types of magnetic components that are needed for the typical SMPS. They include the Output Transformer, usually the most noticeable because of its size compared to the others, the Output Inductors, the Input Inductors and the Current Sense Transformer, each with its own important function. DATATRONIC DISTRIBUTION, INC. Datatronic SMPS and their General Magnetic Usage 1.The Output Transformer or “Main” Transformer takes the input voltage that is supplied to its primary winding and then transforms the input voltage to one or more voltages that are the output of the secondary winding or windings. 2. The Output Inductors are used to filter the output voltage so that the load “sees” a filtered DC voltage. DATATRONIC DISTRIBUTION, INC. Datatronic SMPS and their General Magnetic Usage 3. The Input Inductors filter out the noise generated by the switching transistors so that this noise isn’t emitted back to the source. -
Study on Characteristics of Electromagnetic Coil Used in MEMS Safety and Arming Device
micromachines Article Study on Characteristics of Electromagnetic Coil Used in MEMS Safety and Arming Device Yi Sun 1,2,*, Wenzhong Lou 1,2, Hengzhen Feng 1,2 and Yuecen Zhao 1,2 1 National Key Laboratory of Electro-Mechanics Engineering and Control, School of Mechatronical Engineering, Beijing Institute of technology, Beijing 100081, China; [email protected] (W.L.); [email protected] (H.F.); [email protected] (Y.Z.) 2 Beijing Institute of Technology, Chongqing Innovation Center, Chongqing 401120, China * Correspondence: [email protected]; Tel.: +86-158-3378-5736 Received: 27 June 2020; Accepted: 27 July 2020; Published: 31 July 2020 Abstract: Traditional silicon-based micro-electro-mechanical system (MEMS) safety and arming devices, such as electro-thermal and electrostatically driven MEMS safety and arming devices, experience problems of high insecurity and require high voltage drive. For the current electromagnetic drive mode, the electromagnetic drive device is too large to be integrated. In order to address this problem, we present a new micro electromagnetically driven MEMS safety and arming device, in which the electromagnetic coil is small in size, with a large electromagnetic force. We firstly designed and calculated the geometric structure of the electromagnetic coil, and analyzed the model using COMSOL multiphysics field simulation software. The resulting error between the theoretical calculation and the simulation of the mechanical and electrical properties of the electromagnetic coil was less than 2% under the same size. We then carried out a parametric simulation of the electromagnetic coil, and combined it with the actual processing capacity to obtain the optimized structure of the electromagnetic coil. -

Magnetic Materials: Hysteresis
Magnetic Materials: Hysteresis Ferromagnetic and ferrimagnetic materials have non-linear initial magnetisation curves (i.e. the dotted lines in figure 7), as the changing magnetisation with applied field is due to a change in the magnetic domain structure. These materials also show hysteresis and the magnetisation does not return to zero after the application of a magnetic field. Figure 7 shows a typical hysteresis loop; the two loops represent the same data, however, the blue loop is the polarisation (J = µoM = B-µoH) and the red loop is the induction, both plotted against the applied field. Figure 7: A typical hysteresis loop for a ferro- or ferri- magnetic material. Illustrated in the first quadrant of the loop is the initial magnetisation curve (dotted line), which shows the increase in polarisation (and induction) on the application of a field to an unmagnetised sample. In the first quadrant the polarisation and applied field are both positive, i.e. they are in the same direction. The polarisation increases initially by the growth of favourably oriented domains, which will be magnetised in the easy direction of the crystal. When the polarisation can increase no further by the growth of domains, the direction of magnetisation of the domains then rotates away from the easy axis to align with the field. When all of the domains have fully aligned with the applied field saturation is reached and the polarisation can increase no further. If the field is removed the polarisation returns along the solid red line to the y-axis (i.e. H=0), and the domains will return to their easy direction of magnetisation, resulting in a decrease in polarisation.