Geometric Interpretation of Side-Sharing and Point-Sharing Solutions in the P3P Problem
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chap 3-Triangles.Pdf
Defining Triangles Name(s): In this lesson, you'll experiment with an ordinary triangle and with special triangles that were constructed with constraints. The constraints limit what you can change in the triangie when you drag so that certain reiationships among angles and sides always hold. By observing these relationships, you will classify the triangles. 1. Open the sketch Classify Triangles.gsp. BD 2. Drag different vertices of h--.- \ each of the four triangles / \ t\ to observe and compare AL___\c yle how the triangles behave. QI Which of the kiangles LIqA seems the most flexible? ------------__. \ ,/ \ Explain. * M\----"--: "<-----\U \ a2 \Alhich of the triangles seems the least flexible? Explain. -: measure each I - :-f le, select three l? 3. Measure the three angles in AABC. coints, with the rei€x I loUr middle I 4. Draga vertex of LABC and observe the changing angle measures. To Then, in =ection. I le r/easure menu, answer the following questions, note how each angle can change from I :hoose Angle. I being acute to being right or obtuse. Q3 How many acute angles can a triangle have? ;;,i:?:PJi;il: I qo How many obtuse angles can a triangle have? to classify -sed I rc:s. These terms f> Qg LABC can be an obtuse triangle or an acute :"a- arso be used to I : assify triangles I triangle. One other triangle in the sketch can according to I also be either acute or obtuse. Which triangle is it? their angles. I aG Which triangle is always a right triangle, no matter what you drag? 07 Which triangle is always an equiangular triangle? -: -Fisure a tensth, I =ect a seoment. -

Pumαc - Power Round
PUMαC - Power Round. Geometry Revisited Stobaeus (one of Euclid's students): "But what shall I get by-learning these things?" Euclid to his slave: "Give him three pence, since he must make gain out of what he learns." - Euclid, Elements As the title puts it, this is going to be a geometry power round. And as it always happens with geometry problems, every single result involves certain particular con- figurations that have been studied and re-studied multiple times in literature. So even though we tryed to make it as self-contained as possible, there are a few basic preliminary things you should keep in mind when thinking about these problems. Of course, you might find solutions separate from these ideas, however, it would be unfair not to give a general overview of most of these tools that we ourselves used when we found these results. In any case, feel free to skip the next section and start working on the test if you know these things or feel that such a section might bound your spectrum of ideas or anything! 1 Prerequisites Exercise -6 (1 point). Let ABC be a triangle and let A1 2 BC, B1 2 AC, C1 2 AB, with none of A1, B1, and C1 a vertex of ABC. When we say that A1 2 BC, B1 2 AC, C1 2 AB, we mean that A1 is in the line passing through BC, not necessarily the line segment between them. Prove that if A1, B1, and C1 are collinear, then either none or exactly two of A1, B1, and C1 are in the corresponding line segments. -

High School Geometry This Course Covers the Topics Shown Below
High School Geometry This course covers the topics shown below. Students navigate learning paths based on their level of readiness. Curriculum Arithmetic and Algebra Review (151 topics) Fractions and Decimals (28 topics) Factors Greatest common factor of 2 numbers Equivalent fractions Simplifying a fraction Division involving zero Introduction to addition or subtraction of fractions with different denominators Addition or subtraction of fractions with different denominators Product of a unit fraction and a whole number Product of a fraction and a whole number: Problem type 1 Fraction multiplication Product of a fraction and a whole number: Problem type 2 The reciprocal of a number Division involving a whole number and a fraction Fraction division Complex fraction without variables: Problem type 1 Decimal place value: Tenths and hundredths Rounding decimals Introduction to ordering decimals Using a calculator to convert a fraction to a rounded decimal Addition of aligned decimals Decimal subtraction: Basic Decimal subtraction: Advanced Word problem with addition or subtraction of 2 decimals Multiplication of a decimal by a power of ten Introduction to decimal multiplication Multiplying a decimal by a whole number Word problem with multiple decimal operations: Problem type 1 Converting a fraction to a terminating decimal: Basic Signed Numbers (14 topics) Plotting integers on a number line Ordering integers Absolute value of a number Integer addition: Problem type 1 Integer addition: Problem type 2 Integer subtraction: Problem type 1 Integer -

Higher Education Math Placement
Higher Education Math Placement 1. Whole Numbers, Fractions, and Decimals 1.1 Operations with Whole Numbers Addition with carry (arith050) Subtraction with borrowing (arith006) Multiplication with carry (arith004) Introduction to multiplication of large numbers (arith615) Division with carry (arith005) Introduction to exponents (arith233) Order of operations: Problem type 1 (arith048) Order of operations: Problem type 2 (arith051) Order of operations with whole numbers and exponents: Basic (arith693) 1.2 Equivalent Fractions and Ordering Equivalent fractions (arith212) Simplifying a fraction (arith067) Fractional position on a number line (arith687) Plotting fractions on a number line (arith667) Writing an improper fraction as a mixed number (arith015) Writing a mixed number as an improper fraction (arith619) Ordering fractions with same denominator (arith044) Ordering fractions (arith092) 1.3 Operations with Fractions Addition or subtraction of fractions with the same denominator (arith618) Introduction to addition or subtraction of fractions with different denominators (arith664) Addition or subtraction of fractions with different denominators (arith230) Product of a fraction and a whole number (arith086) Introduction to fraction multiplication (arith119) Fraction multiplication (arith053) Fraction division (arith022) (FF4)Copyright © 2012 UC Regents and ALEKS Corporation. ALEKS is a registered trademark of ALEKS Corporation. P. 1/14 Division involving a whole number and a fraction (arith694) Mixed arithmetic operations with fractions -
Triangle Centres
S T P E C N & S O T C S TE G E O M E T R Y GEOMETRY TRIANGLE CENTRES Rajasthan AIR-24 SSC SSC (CGL)-2011 CAT Raja Sir (A K Arya) Income Tax Inspector CDS : 9587067007 (WhatsApp) Chapter 4 Triangle Centres fdlh Hkh triangle ds fy, yxHkx 6100 centres Intensive gSA defined Q. Alice the princess is standing on a side AB of buesa ls 5 Classical centres important gSa ftUgs ge ABC with sides 4, 5 and 6 and jumps on side bl chapter esa detail ls discuss djsaxsaA BC and again jumps on side CA and finally 1. Orthocentre (yEcdsUnz] H) comes back to his original position. The 2. Incentre (vUr% dsUnz] I) smallest distance Alice could have jumped is? jktdqekjh ,fyl] ,d f=Hkqt ftldh Hkqtk,sa vkSj 3. Centroid (dsUnzd] G) ABC 4, 5 lseh- gS fd ,d Hkqtk ij [kM+h gS] ;gk¡ ls og Hkqtk 4. Circumcentre (ifjdsUnz] O) 6 AB BC ij rFkk fQj Hkqtk CA ij lh/kh Nykax yxkrs gq, okfil vius 5. Excentre (ckº; dsUnz] J) izkjafHkd fcUnq ij vk tkrh gSA ,fyl }kjk r; dh xbZ U;wure nwjh Kkr djsaA 1. Orthocentre ¼yEcdsUnz] H½ : Sol. A fdlh triangle ds rhuksa altitudes (ÅapkbZ;ksa) dk Alice intersection point orthocentre dgykrk gSA Stands fdlh vertex ('kh"kZ fcUnw) ls lkeus okyh Hkqtk ij [khapk x;k F E perpendicular (yEc) altitude dgykrk gSA A B D C F E Alice smallest distance cover djrs gq, okfil viuh H original position ij vkrh gS vFkkZr~ og orthic triangle dh perimeter (ifjeki) ds cjkcj distance cover djrh gSA Orthic triangle dh perimeter B D C acosA + bcosB + c cosC BAC + BHC = 1800 a = BC = 4 laiwjd dks.k (Supplementary angles- ) b = AC = 5 BAC = side BC ds opposite vertex dk angle c = AB = 6 BHC = side BC }kjk orthocenter (H) ij cuk;k 2 2 2 b +c -a 3 x;k angle. -

Chapter 3 –Polygons and Quadrilaterals Concepts & Skills
Chapter 3 –Polygons and Quadrilaterals The Star of Lakshmi is an eight pointed star in Indian philosophy that represents the eight forms of the Hindu goddess Lakshmi. Lakshmi is the goddess of good fortune and prosperity. Of importance to us however, is not the philosophical meaning of the star (although it is very interesting!) but rather that the symbol is an 8 pointed star – otherwise known as a complex star, formed by the intersection of two squares. In the picture to the left we see that this joining of squares forms both regular and irregular shapes. These shapes are called polygons and quadrilaterals. In this chapter we explore the properties of polygons and then narrow our focus to quadrilaterals. Concepts & Skills The skills and concepts covered in this chapter include: • Define, identify, and classify polygons and quadrilaterals • Differentiate between convex and concave shapes • Find the sums of interior angles in convex polygons. • Identify the special properties of interior angles in convex quadrilaterals. • Define a parallelogram. • Understand the properties of a parallelogram • Apply theorems about a parallelogram’s sides, angles and diagonals. • Prove a quadrilateral is a parallelogram in the coordinate plane. • Define and analyze a rectangle, rhombus, and square. • Determine if a parallelogram is a rectangle, rhombus, or square in the coordinate plane. • Analyze the properties of the diagonals of a rectangle, rhombus, and square. • Define and find the properties of trapezoids, isosceles trapezoids, and kites. • Discover the properties of mid-segments of trapezoids. • Plot trapezoids, isosceles trapezoids, and kites in the coordinate plane. Section 3.1 - Classifying Polygons INSTANT RECALL! 1. -

Steiner's Hat: a Constant-Area Deltoid Associated with the Ellipse
KoG•24–2020 R. Garcia, D. Reznik, H. Stachel, M. Helman: Steiner’s Hat: a Constant-Area Deltoid ... https://doi.org/10.31896/k.24.2 RONALDO GARCIA, DAN REZNIK Original scientific paper HELLMUTH STACHEL, MARK HELMAN Accepted 5. 10. 2020. Steiner's Hat: a Constant-Area Deltoid Associated with the Ellipse Steiner's Hat: a Constant-Area Deltoid Associ- Steinerova krivulja: deltoide konstantne povrˇsine ated with the Ellipse pridruˇzene elipsi ABSTRACT SAZETAKˇ The Negative Pedal Curve (NPC) of the Ellipse with re- Negativno noˇziˇsnakrivulja elipse s obzirom na neku nje- spect to a boundary point M is a 3-cusp closed-curve which zinu toˇcku M je zatvorena krivulja s tri ˇsiljka koja je afina is the affine image of the Steiner Deltoid. Over all M the slika Steinerove deltoide. Za sve toˇcke M na elipsi krivulje family has invariant area and displays an array of interesting dobivene familije imaju istu povrˇsinui niz zanimljivih svoj- properties. stava. Key words: curve, envelope, ellipse, pedal, evolute, deltoid, Poncelet, osculating, orthologic Kljuˇcnerijeˇci: krivulja, envelopa, elipsa, noˇziˇsnakrivulja, evoluta, deltoida, Poncelet, oskulacija, ortologija MSC2010: 51M04 51N20 65D18 1 Introduction Main Results: 0 0 Given an ellipse E with non-zero semi-axes a;b centered • The triangle T defined by the 3 cusps Pi has invariant at O, let M be a point in the plane. The Negative Pedal area over M, Figure 7. Curve (NPC) of E with respect to M is the envelope of • The triangle T defined by the pre-images Pi of the 3 lines passing through points P(t) on the boundary of E cusps has invariant area over M, Figure 7. -

Steiner's Hat: a Constant-Area Deltoid Associated with the Ellipse
STEINER’S HAT: A CONSTANT-AREA DELTOID ASSOCIATED WITH THE ELLIPSE RONALDO GARCIA, DAN REZNIK, HELLMUTH STACHEL, AND MARK HELMAN Abstract. The Negative Pedal Curve (NPC) of the Ellipse with respect to a boundary point M is a 3-cusp closed-curve which is the affine image of the Steiner Deltoid. Over all M the family has invariant area and displays an array of interesting properties. Keywords curve, envelope, ellipse, pedal, evolute, deltoid, Poncelet, osculat- ing, orthologic. MSC 51M04 and 51N20 and 65D18 1. Introduction Given an ellipse with non-zero semi-axes a,b centered at O, let M be a point in the plane. The NegativeE Pedal Curve (NPC) of with respect to M is the envelope of lines passing through points P (t) on the boundaryE of and perpendicular to [P (t) M] [4, pp. 349]. Well-studied cases [7, 14] includeE placing M on (i) the major− axis: the NPC is a two-cusp “fish curve” (or an asymmetric ovoid for low eccentricity of ); (ii) at O: this yielding a four-cusp NPC known as Talbot’s Curve (or a squashedE ellipse for low eccentricity), Figure 1. arXiv:2006.13166v5 [math.DS] 5 Oct 2020 Figure 1. The Negative Pedal Curve (NPC) of an ellipse with respect to a point M on the plane is the envelope of lines passing through P (t) on the boundary,E and perpendicular to P (t) M. Left: When M lies on the major axis of , the NPC is a two-cusp “fish” curve. Right: When− M is at the center of , the NPC is 4-cuspE curve with 2-self intersections known as Talbot’s Curve [12]. -
MSG.09.Plane Geometry.Pdf
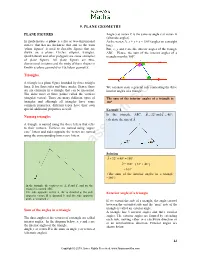
9. PLANE GEOMETRY PLANE FIGURES Angle x at vertex C is the same as angle x at vertex A (alternate angles). In mathematics, a plane is a flat or two-dimensional At the vertex A, x + y + z = 1800 (angles on a straight surface that has no thickness that and so the term line). ‘plane figures’ is used to describe figures that are But, x, y and z are the interior angles of the triangle drawn on a plane. Circles, ellipses, triangles, ABC. Hence, the sum of the interior angles of a quadrilaterals and other polygons are some examples triangle must be 1800. of plane figures. All plane figures are two- dimensional in nature and the study of these shapes is known as plane geometry or Euclidean geometry. Triangles A triangle is a plane figure bounded by three straight lines. It has three sides and three angles. Hence, there We can now state a general rule connecting the three are six elements in a triangle that can be measured. interior angles of a triangle. The sides meet at three points called the vertices (singular vertex). There are many different types of The sum of the interior angles of a triangle is triangles and although all triangles have some 1800. common properties, different types have their own special additional properties as well. Example 1 In the triangle, ABC, Bˆ =°32 and Cˆ =°48 ; Naming triangles ˆ calculate the size ofA . A triangle is named using the three letters that refer to their vertices. Vertices are named using ‘upper case’ letters and sides opposite the vertex are named using the corresponding lower case letters. -

Planar Line Families. H
PLANAR LINE FAMILIES. H PRESTON C. HAMMER AND ANDREW SOBCZYK 1. Introduction. An outwardly simple planar line family has been defined in the first paper of this series [l] to be a family of lines which simply covers the exterior of some circle, including points at infinity. In [l] a characterization of outwardly simple line families is given and a construction method presented for all constant diameter- length convex bodies in the plane. In this paper we give a characterization of outwardly simple line families when represented in essentially normal form as a one- parameter family of lines. The internal complexity of an outwardly simple line family is then studied. Two classes of points, the contact points and the turning points of a line family, are defined. The union of these classes forms a generalized envelope of the line family. It is shown, in particular, that the set of all points lying either on an even number of lines or on an infinite number of lines in an outwardly simple line family is of planar measure zero. The set of all intersection points of pairs of lines in an outwardly simple line family is shown to be convex relative to the line family. 2. Characterization of outwardly simple line families. Let F be an outwardly simple line family and let ß be a circle of radius r contain- ing in its interior all intersection points of pairs of lines in F. Let a cartesian coordinate system, {u, v), be chosen so that the origin is at the center of ß. -

Olson, Melfried Geometric Selections for Middle School Leac
DOCUMENT RESUME ED 210 166 SE 035 844 AUTHOR Michele, Douglas B.: Olson, Melfried TITLE Geometric Selections for Middle School leachers (5-9). The Curriculum Series. INS1ITUTION National Education Association, Washington, D.C. REPCET NO ISBN-0-8106-1720-X POB DATE 81 NOTE 96p.; Not available in paper copy due tc copyright restrictions. AVAILABLE FROM National Education Association, 1201 Sixteenth St., N.V., Washington, DC 20036 (Stock No. 1720-1-00: no price quoted) . Enps PRICE MF01 Plus Postage. PC Not Available from EDES. DESCRIPTORS Elementary Secondary Education: *Geometric Concepts: *Geometry: Instructional Materials: Learning Activities: Mathematical Enrichment; MatheMatics Curriculum: *Mathematics Education: *Mathematics Instruction: *piddle Schools: Problem Solving: *Teaching Guides: T.:aching Methods AiNCT ThiE document is written for middle school teachers of grades five through nine who do not have specialized backgrounds in geometry. It is arranged in three parts. The first part provides a brief overview of tha geometry curriculum of the middle school that includes the present state of affairs, a rationale for inclusion of geometry in the curriculum, the geometry that is suggested for instruction, and suggestions for teaching methods. Part two covers the following selected topics: axiomatic systems and models, distance, congruence, constructions, and transformational geometry. The material in this part is not designed for immediate use, but requires adaptation to particular classroom settings. Most sections include suggested exercises, learning activities, and selected references. The third part is an extensive bibliography of references for both readings and addi'ional activities in geometry. (MP) *********************************************************************** Reproductions supplied by EDRS are the best that can be made * from the origincl document. -
![[Math.MG] 28 Mar 2017](https://docslib.b-cdn.net/cover/3356/math-mg-28-mar-2017-4963356.webp)
[Math.MG] 28 Mar 2017
Vertex positions of the generalized orthocenter and a related elliptic curve Igor Minevich and Patrick Morton March 29, 2017 1 Introduction In the third of our series of papers on cevian geometry [9], we have studied the properties of the generalized orthocenter H of a point P with respect to an ordinary triangle ABC in the extended Euclidean plane, using synthetic techniques from projective geometry. This generalized orthocenter is defined as follows. Letting K denote the complement map with respect to ABC and ι the isotomic map (see [1], [6]), the point Q = K ◦ ι(P ) is called the isotomcomple- ment of P . Further, let D; E; F denote the traces of P on the sides of ABC. The generalized orthocenter H is defined to be the unique point H for which the lines HA; HB; HC are parallel to QD; QE; QF , respectively. We showed (synthetically) in [7] that H is given by the formula −1 −1 H = K ◦ TP 0 ◦ K(Q); where TP 0 is the unique affine map taking ABC to the cevian triangle D3E3F3 of the isotomic conjugate P 0 = ι(P ) of P . The related point −1 O = K(H) = TP 0 ◦ K(Q) is the generalized circumcenter (for P ) and is the center of the circumconic ~ −1 0 CO = TP 0 (NP 0 ), where NP 0 is the nine-point conic for the quadrangle ABCP (see [9], Theorems 2.2 and 2.4; and [2], p. 84). We also showed in [9], Theorem 3.4, that if TP is the unique affine map taking −1 ABC to the cevian triangle DEF of P , then the affine map M = TP ◦K ◦TP 0 ~ arXiv:1608.04614v2 [math.MG] 28 Mar 2017 is a homothety or translation which maps the circumconic CO to the inconic I, defined to be the conic with center Q which is tangent to the sides of ABC at the points D; E; F .