Parameterized Modeling of Multiport Passive Circuit Blocks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Input and Output Directions and Hankel Singular Values CEE 629
Principal Input and Output Directions and Hankel Singular Values CEE 629. System Identification Duke University, Fall 2017 1 Continuous-time systems in the frequency domain In the frequency domain, the input-output relationship of a LTI system (with r inputs, m outputs, and n internal states) is represented by the m-by-r rational frequency response function matrix equation y(ω) = H(ω)u(ω) . At a frequency ω a set of inputs with amplitudes u(ω) generate steady-state outputs with amplitudes y(ω). (These amplitude vectors are, in general, complex-valued, indicating mag- nitude and phase.) The singular value decomposition of the transfer function matrix is H(ω) = Y (ω) Σ(ω) U ∗(ω) (1) where: U(ω) is the r by r orthonormal matrix of input amplitude vectors, U ∗U = I, and Y (ω) is the m by m orthonormal matrix of output amplitude vectors, Y ∗Y = I Σ(ω) is the m by r diagonal matrix of singular values, Σ(ω) = diag(σ1(ω), σ2(ω), ··· σn(ω)) At any frequency ω, the singular values are ordered as: σ1(ω) ≥ σ2(ω) ≥ · · · ≥ σn(ω) ≥ 0 Re-arranging the singular value decomposition of H(s), H(ω)U(ω) = Y (ω) Σ(ω) or H(ω) ui(ω) = σi(ω) yi(ω) where ui(ω) and yi(ω) are the i-th columns of U(ω) and Y (ω). Since ||ui(ω)||2 = 1 and ||yi(ω)||2 = 1, the singular value σi(ω) represents the scaling from inputs with complex am- plitudes ui(ω) to outputs with amplitudes yi(ω). -

Chapter 6 Two-Port Network Model
Chapter 6 Two-Port Network Model 6.1 Introduction In this chapter a two-port network model of an actuator will be briefly described. In Chapter 5, it was shown that an automated test setup using an active system can re- create various load impedances over a limited range of frequencies. This test set-up can therefore be used to automatically reproduce any load impedance condition (related to a possible application) and apply it to a test or sample actuator. It is then possible to collect characteristic data from the test actuator such as force, velocity, current and voltage. Those characteristics can then be used to help to determine whether the tested actuator is appropriate or not for the case simulated. However versatile and easy to use this test set-up may be, because of its limitations, there is some characteristic data it will not be able to provide. For this reason and the fact that it can save a lot of measurements, having a good linear actuator model can be of great use. Developed for transduction theory [29], the linear model presented in this chapter is 77 called a Two-Port Network model. The automated test set-up remains an essential complement for this model, as it will allow the development and verification of accuracy. This chapter will focus on the two-port network model of the 1_3 tube array actuator provided by MSI (Cf: Figure 5.5). 6.2 Theory of the Two–Port Network Model As a transducer converts energy from electrical to mechanical forms, and vice- versa, it can be modelled as a Two-Port Network that relates the electrical properties at one port to the mechanical properties at the other port. -
Analysis of Microwave Networks
! a b L • ! t • h ! 9/ a 9 ! a b • í { # $ C& $'' • L C& $') # * • L 9/ a 9 + ! a b • C& $' D * $' ! # * Open ended microstrip line V + , I + S Transmission line or waveguide V − , I − Port 1 Port Substrate Ground (a) (b) 9/ a 9 - ! a b • L b • Ç • ! +* C& $' C& $' C& $ ' # +* & 9/ a 9 ! a b • C& $' ! +* $' ù* # $ ' ò* # 9/ a 9 1 ! a b • C ) • L # ) # 9/ a 9 2 ! a b • { # b 9/ a 9 3 ! a b a w • L # 4!./57 #) 8 + 8 9/ a 9 9 ! a b • C& $' ! * $' # 9/ a 9 : ! a b • b L+) . 8 5 # • Ç + V = A V + BI V 1 2 2 V 1 1 I 2 = 0 V 2 = 0 V 2 I 1 = CV 2 + DI 2 I 2 9/ a 9 ; ! a b • !./5 $' C& $' { $' { $ ' [ 9/ a 9 ! a b • { • { 9/ a 9 + ! a b • [ 9/ a 9 - ! a b • C ) • #{ • L ) 9/ a 9 ! a b • í !./5 # 9/ a 9 1 ! a b • C& { +* 9/ a 9 2 ! a b • I • L 9/ a 9 3 ! a b # $ • t # ? • 5 @ 9a ? • L • ! # ) 9/ a 9 9 ! a b • { # ) 8 -

Lecture 3: Transfer Function and Dynamic Response Analysis
Transfer function approach Dynamic response Summary Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis Paweł Malczyk Division of Theory of Machines and Robots Institute of Aeronautics and Applied Mechanics Faculty of Power and Aeronautical Engineering Warsaw University of Technology October 17, 2019 © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 1 / 31 Transfer function approach Dynamic response Summary Outline 1 Transfer function approach 2 Dynamic response 3 Summary © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 2 / 31 Transfer function approach Dynamic response Summary Transfer function approach 1 Transfer function approach SISO system Definition Poles and zeros Transfer function for multivariable system Properties 2 Dynamic response 3 Summary © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 3 / 31 Transfer function approach Dynamic response Summary SISO system Fig. 1: Block diagram of a single input single output (SISO) system Consider the continuous, linear time-invariant (LTI) system defined by linear constant coefficient ordinary differential equation (LCCODE): dny dn−1y + − + ··· + _ + = an n an 1 n−1 a1y a0y dt dt (1) dmu dm−1u = b + b − + ··· + b u_ + b u m dtm m 1 dtm−1 1 0 initial conditions y(0), y_(0),..., y(n−1)(0), and u(0),..., u(m−1)(0) given, u(t) – input signal, y(t) – output signal, ai – real constants for i = 1, ··· , n, and bj – real constants for j = 1, ··· , m. How do I find the LCCODE (1)? . -

An Approximate Transfer Function Model for a Double-Pipe Counter-Flow Heat Exchanger
energies Article An Approximate Transfer Function Model for a Double-Pipe Counter-Flow Heat Exchanger Krzysztof Bartecki Division of Control Science and Engineering, Opole University of Technology, ul. Prószkowska 76, 45-758 Opole, Poland; [email protected] Abstract: The transfer functions G(s) for different types of heat exchangers obtained from their par- tial differential equations usually contain some irrational components which reflect quite well their spatio-temporal dynamic properties. However, such a relatively complex mathematical representa- tion is often not suitable for various practical applications, and some kind of approximation of the original model would be more preferable. In this paper we discuss approximate rational transfer func- tions Gˆ(s) for a typical thick-walled double-pipe heat exchanger operating in the counter-flow mode. Using the semi-analytical method of lines, we transform the original partial differential equations into a set of ordinary differential equations representing N spatial sections of the exchanger, where each nth section can be described by a simple rational transfer function matrix Gn(s), n = 1, 2, ... , N. Their proper interconnection results in the overall approximation model expressed by a rational transfer function matrix Gˆ(s) of high order. As compared to the previously analyzed approximation model for the double-pipe parallel-flow heat exchanger which took the form of a simple, cascade interconnection of the sections, here we obtain a different connection structure which requires the use of the so-called linear fractional transformation with the Redheffer star product. Based on the resulting rational transfer function matrix Gˆ(s), the frequency and the steady-state responses of the approximate model are compared here with those obtained from the original irrational transfer Citation: Bartecki, K. -

Brief Study of Two Port Network and Its Parameters
© 2014 IJIRT | Volume 1 Issue 6 | ISSN : 2349-6002 Brief study of two port network and its parameters Rishabh Verma, Satya Prakash, Sneha Nivedita Abstract- this paper proposes the study of the various ports (of a two port network. in this case) types of parameters of two port network and different respectively. type of interconnections of two port networks. This The Z-parameter matrix for the two-port network is paper explains the parameters that are Z-, Y-, T-, T’-, probably the most common. In this case the h- and g-parameters and different types of relationship between the port currents, port voltages interconnections of two port networks. We will also discuss about their applications. and the Z-parameter matrix is given by: Index Terms- two port network, parameters, interconnections. where I. INTRODUCTION A two-port network (a kind of four-terminal network or quadripole) is an electrical network (circuit) or device with two pairs of terminals to connect to external circuits. Two For the general case of an N-port network, terminals constitute a port if the currents applied to them satisfy the essential requirement known as the port condition: the electric current entering one terminal must equal the current emerging from the The input impedance of a two-port network is given other terminal on the same port. The ports constitute by: interfaces where the network connects to other networks, the points where signals are applied or outputs are taken. In a two-port network, often port 1 where ZL is the impedance of the load connected to is considered the input port and port 2 is considered port two. -

A Passive Synthesis for Time-Invariant Transfer Functions
IEEE TRANSACTIONS ON CIRCUIT THEORY, VOL. CT-17, NO. 3, AUGUST 1970 333 A Passive Synthesis for Time-Invariant Transfer Functions PATRICK DEWILDE, STUDENT MEMBER, IEEE, LEONARD hiI. SILVERRJAN, MEMBER, IEEE, AND R. W. NEW-COMB, MEMBER, IEEE Absfroct-A passive transfer-function synthesis based upon state- [6], p. 307), in which a minimal-reactance scalar transfer- space techniques is presented. The method rests upon the formation function synthesis can be obtained; it provides a circuit of a coupling admittance that, when synthesized by. resistors and consideration of such concepts as stability, conkol- gyrators, is to be loaded by capacitors whose voltages form the state. By the use of a Lyapunov transformation, the coupling admittance lability, and observability. Background and the general is made positive real, while further transformations allow internal theory and position of state-space techniques in net- dissipation to be moved to the source or the load. A general class work theory can be found in [7]. of configurations applicable to integrated circuits and using only grounded gyrators, resistors, and a minimal number of capacitors II. PRELIMINARIES is obtained. The minimum number of resistors for the structure is also obtained. The technique illustrates how state-variable We first recall several facts pertinent to the intended theory can be used to obtain results not yet available through synthesis. other methods. Given a transfer function n X m matrix T(p) that is rational wit.h real coefficients (called real-rational) and I. INTRODUCTION that has T(m) = D, a finite constant matrix, there exist, real constant matrices A, B, C, such that (lk is the N ill, a procedure for time-v:$able minimum-re- k X lc identity, ,C[ ] is the Laplace transform) actance passive synthesis of a “stable” impulse response matrix was given based on a new-state- T(p) = D + C[pl, - A]-‘B, JXYI = T(~)=Wl equation technique for imbedding the impulse-response (14 matrix in a passive driving-point impulse-response matrix. -
Introduction to Transmission Lines
INTRODUCTION TO TRANSMISSION LINES DR. FARID FARAHMAND FALL 2012 http://www.empowermentresources.com/stop_cointelpro/electromagnetic_warfare.htm RF Design ¨ In RF circuits RF energy has to be transported ¤ Transmission lines ¤ Connectors ¨ As we transport energy energy gets lost ¤ Resistance of the wire à lossy cable ¤ Radiation (the energy radiates out of the wire à the wire is acting as an antenna We look at transmission lines and their characteristics Transmission Lines A transmission line connects a generator to a load – a two port network Transmission lines include (physical construction): • Two parallel wires • Coaxial cable • Microstrip line • Optical fiber • Waveguide (very high frequencies, very low loss, expensive) • etc. Types of Transmission Modes TEM (Transverse Electromagnetic): Electric and magnetic fields are orthogonal to one another, and both are orthogonal to direction of propagation Example of TEM Mode Electric Field E is radial Magnetic Field H is azimuthal Propagation is into the page Examples of Connectors Connectors include (physical construction): BNC UHF Type N Etc. Connectors and TLs must match! Transmission Line Effects Delayed by l/c At t = 0, and for f = 1 kHz , if: (1) l = 5 cm: (2) But if l = 20 km: Properties of Materials (constructive parameters) Remember: Homogenous medium is medium with constant properties ¨ Electric Permittivity ε (F/m) ¤ The higher it is, less E is induced, lower polarization ¤ For air: 8.85xE-12 F/m; ε = εo * εr ¨ Magnetic Permeability µ (H/m) Relative permittivity and permeability -
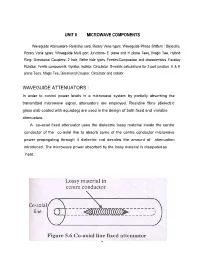
WAVEGUIDE ATTENUATORS : in Order to Control Power Levels in a Microwave System by Partially Absorbing the Transmitted Microwave Signal, Attenuators Are Employed
UNIT II MICROWAVE COMPONENTS Waveguide Attenuators- Resistive card, Rotary Vane types. Waveguide Phase Shifters : Dielectric, Rotary Vane types. Waveguide Multi port Junctions- E plane and H plane Tees, Magic Tee, Hybrid Ring. Directional Couplers- 2 hole, Bethe hole types. Ferrites-Composition and characteristics, Faraday Rotation. Ferrite components: Gyrator, Isolator, Circulator. S-matrix calculations for 2 port junction, E & H plane Tees, Magic Tee, Directional Coupler, Circulator and Isolator WAVEGUIDE ATTENUATORS : In order to control power levels in a microwave system by partially absorbing the transmitted microwave signal, attenuators are employed. Resistive films (dielectric glass slab coated with aquadag) are used in the design of both fixed and variable attenuators. A co-axial fixed attenuator uses the dielectric lossy material inside the centre conductor of the co-axial line to absorb some of the centre conductor microwave power propagating through it dielectric rod decides the amount of attenuation introduced. The microwave power absorbed by the lossy material is dissipated as heat. 1 In waveguides, the dielectric slab coated with aquadag is placed at the centre of the waveguide parallel to the maximum E-field for dominant TEIO mode. Induced current on the lossy material due to incoming microwave signal, results in power dissipation, leading to attenuation of the signal. The dielectric slab is tapered at both ends upto a length of more than half wavelength to reduce reflections as shown in figure 5.7. The dielectric slab may be made movable along the breadth of the waveguide by supporting it with two dielectric rods separated by an odd multiple of quarter guide wavelength and perpendicular to electric field. -

State Space Models
State Space Models MUS420 Equations of motion for any physical system may be Introduction to Linear State Space Models conveniently formulated in terms of its state x(t): Julius O. Smith III ([email protected]) Center for Computer Research in Music and Acoustics (CCRMA) Input Forces u(t) Department of Music, Stanford University Stanford, California 94305 ft Model State x(t) x˙(t) February 5, 2019 Outline R State Space Models x˙(t)= ft[x(t),u(t)] • where Linear State Space Formulation • x(t) = state of the system at time t Markov Parameters (Impulse Response) • u(t) = vector of external inputs (typically driving forces) Transfer Function • ft = general function mapping the current state x(t) and Difference Equations to State Space Models inputs u(t) to the state time-derivative x˙(t) • Similarity Transformations The function f may be time-varying, in general • • t Modal Representation (Diagonalization) This potentially nonlinear time-varying model is • • Matlab Examples extremely general (but causal) • Even the human brain can be modeled in this form • 1 2 State-Space History Key Property of State Vector The key property of the state vector x(t) in the state 1. Classic phase-space in physics (Gibbs 1901) space formulation is that it completely determines the System state = point in position-momentum space system at time t 2. Digital computer (1950s) 3. Finite State Machines (Mealy and Moore, 1960s) Future states depend only on the current state x(t) • and on any inputs u(t) at time t and beyond 4. Finite Automata All past states and the entire input history are 5. -

A Unified State-Space Approach to Rlct Two-Port
A UNIFIED STATE-SPACE APPROACH TO RLCT TWO-PORT TRANSFER FUNCTION SYNTHESIS By EDDIE RANDOLPH FOWLER Bachelor of Science Kan,sas State University Manhattan, Kansas 1957 Master of Science Kansas State University Manhattan, Kansas 1965 Submitted to the Faculty of the Graduate Col.lege of the Oklahoma State University in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY May, 1969 OKLAHOMA STATE UNIVERSITY LIBRARY SEP 2l1 l969 ~ A UNIFIED STATE-SPACE APPROACH TO RLCT TWO-PORT TRANSFER FUNCTION SYNTHESIS Thesis Approved: Dean of the Graduate College ii AC!!..NOWLEDGEMENTS Only those that have had children in school all during their graduate studies know the effort and sacrifice that my wife, Pat, has endured during my graduate career. I appreciate her accepting this role without complainL Also I am deeply grateful that she was willing to take on the horrendous task of typing this thesis. My heartfelt thanks to Dr. Rao Yarlagadda, my thesis advisor, who was always available for $Uidance and help during the research and writing of this thesis. I appreciate the assistance and encouragement of the other members of my graduate comruitteei, Dr. Kenneth A. McCollom, Dr. Charles M. Bacon ar1d Dr~ K.ar 1 N.... ·Re id., I acknowledge Paul Howell, a fellow Electrical Engineering grad uate student, whose Christian Stewardship has eased the burden during these last months of thesis preparation~ Also Dwayne Wilson, Adminis trative Assistant, has n1y gratitude for assisting with the financial and personal problems of the Electrical Engineering graduate students. My thanks to Dr. Arthur M. Breipohl for making available the assistant ship that was necessary before it was financially possible to initiate my doctoral studies. -

MUS420 Introduction to Linear State Space Models
State Space Models MUS420 Equations of motion for any physical system may be Introduction to Linear State Space Models conveniently formulated in terms of its state x(t): Julius O. Smith III ([email protected]) Center for Computer Research in Music and Acoustics (CCRMA) Input Forces u(t) Department of Music, Stanford University Stanford, California 94305 ft Model State x(t) x˙(t) February 5, 2019 Outline R State Space Models x˙(t)= ft[x(t),u(t)] • where Linear State Space Formulation • x(t) = state of the system at time t Markov Parameters (Impulse Response) • u(t) = vector of external inputs (typically driving forces) Transfer Function • ft = general function mapping the current state x(t) and Difference Equations to State Space Models inputs u(t) to the state time-derivative x˙(t) • Similarity Transformations The function f may be time-varying, in general • • t Modal Representation (Diagonalization) This potentially nonlinear time-varying model is • • Matlab Examples extremely general (but causal) • Even the human brain can be modeled in this form • 1 2 State-Space History Key Property of State Vector The key property of the state vector x(t) in the state 1. Classic phase-space in physics (Gibbs 1901) space formulation is that it completely determines the System state = point in position-momentum space system at time t 2. Digital computer (1950s) 3. Finite State Machines (Mealy and Moore, 1960s) Future states depend only on the current state x(t) • and on any inputs u(t) at time t and beyond 4. Finite Automata All past states and the entire input history are 5.