A Decoding System of Maxicode Using the Camera Mobile Phone
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

How to Scan and Create a QR Code (Using Quickmark)
How to scan and create a QR code (using Quickmark) A QR Code is a matrix barcode (or two-dimensional code), readable by QR scanners, mobile phones with a camera, and smartphones. It contains information like text, website url or contact details. When you scan the code it will reveal the information on your cell phone, so you do not need to type anything! How to scan a QR Code: 1. Click on the Apps page icon to go to the apps screen. Swipe your finger to go to the correct screen if necessary. 2. Touch on the apps menu on the top right of the apps screen. 3. Open (touch) any of the QR reader apps on your tablet (e.g. Quickmark or QR Droid). We have used Quickmark. If you do not have it installed, please do that 1st. See How to install apps tutorial. 4. Position the front camera so that it includes the entire QR code within the boundaries of the block window. 5. When the QR reader recognise the code, you will hear a sound telling you that it has read the code and display the relevant text/Url/contact details/information. 6. The previous QR code should show you the website address: http://ict4red.blogspot.c om/2013/09/how-to- scan-and-create-qr- code.html If you click on the URL address, it will take you to the ICT4RED blog page. 7. You can also scan QR codes from the app homepage by clicking on the Quickmark Logo in the top left hand corner. -

Readerware Cuecat Manual
Readerware CueCat Manual This manual will help you install your CueCat(R) barcode reader and get you started scanning your books, music and videos. Important: If you purchased your CueCat from another source, you may have received software with it, do not install this software. You do not need any additional software when using your CueCat with Readerware, and following the demise of Digital Convergence, the CueCat software will no longer work. Table of Contents Installing a PS/2 CueCat on a desktop machine (Windows and Linux)..............................2 Installing a PS/2 CueCat on a laptop (Windows and Linux)..............................................4 Installing a USB CueCat (Windows, Mac OS X and Linux)..............................................5 How to Swipe a Barcode..................................................................................................6 Troubleshooting................................................................................................................7 Readerware CueCat Manual v1.04 Page: 1 Installing a PS/2 CueCat on a desktop machine (Windows and Linux) Note: Before you begin, shut down all programs and turn off your computer. If you are installing the CueCat reader on a laptop computer, proceed to the next section. Disconnect the keyboard cable from your computer. The CueCat reader operates through the keyboard port. Make sure you do not use the mouse port. If the keyboard port on your computer doesn©t match the male connector on the CueCat reader, you can get adapters at any computer store or Radio Shack. Readerware CueCat Manual v1.04 Page: 2 Connect the male connector on the CueCat reader into the computer©s keyboard port. Match up the "notch key" for easy insertion. (Note: the male connector is the one with the protruding pins.) Connect the keyboard cable to the female connector on the CueCat reader. -
CS4070 Scanner Product Reference Guide (En)
CS4070 SCANNER PRODUCT REFERENCE GUIDE CS4070 SCANNER PRODUCT REFERENCE GUIDE MN000762A07 Revision A December 2020 ii CS4070 Scanner Product Reference Guide No part of this publication may be reproduced or used in any form, or by any electrical or mechanical means, without permission in writing. This includes electronic or mechanical means, such as photocopying, recording, or information storage and retrieval systems. The material in this manual is subject to change without notice. The software is provided strictly on an “as is” basis. All software, including firmware, furnished to the user is on a licensed basis. We grant to the user a non-transferable and non-exclusive license to use each software or firmware program delivered hereunder (licensed program). Except as noted below, such license may not be assigned, sublicensed, or otherwise transferred by the user without our prior written consent. No right to copy a licensed program in whole or in part is granted, except as permitted under copyright law. The user shall not modify, merge, or incorporate any form or portion of a licensed program with other program material, create a derivative work from a licensed program, or use a licensed program in a network without written permission. The user agrees to maintain our copyright notice on the licensed programs delivered hereunder, and to include the same on any authorized copies it makes, in whole or in part. The user agrees not to decompile, disassemble, decode, or reverse engineer any licensed program delivered to the user or any portion thereof. Zebra reserves the right to make changes to any product to improve reliability, function, or design. -
How to Use a QR Code – Girl Scout Cookies
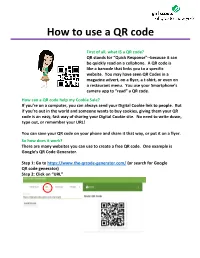
How to use a QR code First of all, what IS a QR code? QR stands for “Quick Response”--because it can be quickly read on a cellphone. A QR code is like a barcode that links you to a specific website. You may have seen QR Codes in a magazine advert, on a flyer, a t-shirt, or even on a restaurant menu. You use your Smartphone’s camera app to “read” a QR code. How can a QR code help my Cookie Sale? If you’re on a computer, you can always send your Digital Cookie link to people. But if you’re out in the world and someone wants to buy cookies, giving them your QR code is an easy, fast way of sharing your Digital Cookie site. No need to write down, type out, or remember your URL! You can save your QR code on your phone and share it that way, or put it on a flyer. So how does it work? There are many websites you can use to create a free QR code. One example is Google’s QR Code Generator. Step 1: Go to https://www.the-qrcode-generator.com/ (or search for Google QR code generator) Step 2: Click on “URL” Step 3: Enter your Digital Cookie site URL. In this example, I’m using the DOC login page. Step 4: Click the Save icon Open your phone’s camera and hold it up to this QR code-- you’ll see the DOC login page appear. It works! Step 5: Name the file and save it as a PNG Step 6: Share your QR code with the world! Now, when someone uses the camera on their phone to view your QR code, your link will pop up on their screen! . -

Xerox® Freeflow® VI Compose User Guide © 2020 Xerox Corporation
Version 16.0.3.0 December 2020 702P08479 Xerox® FreeFlow® VI Compose User Guide © 2020 Xerox Corporation. All rights reserved. XEROX® and XEROX and Design®, FreeFlow®, FreeFlow Makeready®, FreeFlow Output Manager®, FreeFlow Process Manager®, VIPP®, and GlossMark® are trademarks of Xerox Corporation in the United States and/or other countries. Other company trademarks are acknowledged as follows: Adobe PDFL - Adobe PDF Library Copyright © 1987-2020 Adobe Systems Incorporated. Adobe®, the Adobe logo, Acrobat®, the Acrobat logo, Acrobat Reader®, Distiller®, Adobe PDF JobReady™, InDesign®, PostScript®, and the PostScript logo are either registered trademarks or trademarks of Adobe Systems Incorporated in the United States and/or other countries. All instances of the name PostScript in the text are references to the PostScript language as defined by Adobe Systems Incorporated unless otherwise stated. The name PostScript is used as a product trademark for Adobe Systems implementation of the PostScript language interpreter, and other Adobe products. Copyright 1987-2020 Adobe Systems Incorporated and its licensors. All rights reserved. Includes Adobe® PDF Libraries and Adobe Normalizer technology. Intel®, Pentium®, Centrino®, and Xeon® are registered trademarks of Intel Corporation. Intel Core™ Duo is a trademark of Intel Corporation. Intelligent Mail® is a registered trademark of the United States Postal Service. Macintosh®, Mac®, and Mac OS® are registered trademarks of Apple, Inc., registered in the United States and other countries. Elements of Apple Technical User Documentation used by permission from Apple, Inc. Novell® and NetWare® are registered trademarks of Novell, Inc. in the United States and other countries. Oracle® is a registered trademark of Oracle Corporation Redwood City, California. -
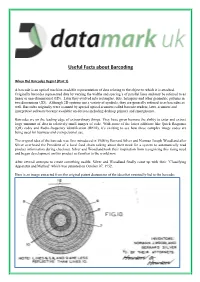
Useful Facts About Barcoding
Useful Facts about Barcoding When Did Barcodes Begin? (Part 1) A barcode is an optical machine-readable representation of data relating to the object to which it is attached. Originally barcodes represented data by varying the widths and spacing’s of parallel lines and may be referred to as linear or one-dimensional (1D). Later they evolved into rectangles, dots, hexagons and other geometric patterns in two dimensions (2D). Although 2D systems use a variety of symbols, they are generally referred to as barcodes as well. Barcodes originally were scanned by special optical scanners called barcode readers; later, scanners and interpretive software became available on devices including desktop printers and smartphones. Barcodes are on the leading edge of extraordinary things. They have given humans the ability to enter and extract large amounts of data in relatively small images of code. With some of the latest additions like Quick Response (QR) codes and Radio-frequency identification (RFID), it’s exciting to see how these complex image codes are being used for business and even personal use. The original idea of the barcode was first introduced in 1948 by Bernard Silver and Norman Joseph Woodland after Silver overheard the President of a local food chain talking about their need for a system to automatically read product information during checkout. Silver and Woodland took their inspiration from recognizing this rising need and began development on this product so familiar to the world now. After several attempts to create something usable, Silver and Woodland finally came up with their ”Classifying Apparatus and Method” which was patented on October 07, 1952. -
Gryphon™ I GD44XX General Purpose Corded Handheld Area Imager Bar Code Reader
Gryphon™ I GD44XX General Purpose Corded Handheld Area Imager Bar Code Reader Quick Reference Guide Datalogic Scanning, Inc. 959 Terry Street Eugene, Oregon 97402 USA Telephone: (541) 683-5700 Fax: (541) 345-7140 An Unpublished Work - All rights reserved. No part of the con- tents of this documentation or the procedures described therein may be reproduced or transmitted in any form or by any means without prior written permission of Datalogic Scanning, Inc. or its subsidiaries or affiliates ("Datalogic" or “Datalogic Scanning”). Owners of Datalogic products are hereby granted a non-exclu- sive, revocable license to reproduce and transmit this documen- tation for the purchaser's own internal business purposes. Purchaser shall not remove or alter any proprietary notices, including copyright notices, contained in this documentation and shall ensure that all notices appear on any reproductions of the documentation. Should future revisions of this manual be published, you can acquire printed versions by contacting your Datalogic represen- tative. Electronic versions may either be downloadable from the Datalogic website (www.scanning.datalogic.com) or provided on appropriate media. If you visit our website and would like to make comments or suggestions about this or other Datalogic publications, please let us know via the "Contact Datalogic" page. Disclaimer Datalogic has taken reasonable measures to provide informa- tion in this manual that is complete and accurate, however, Dat- alogic reserves the right to change any specification at any time without prior notice. Datalogic and the Datalogic logo are registered trademarks of Datalogic S.p.A. in many countries, including the U.S.A. -

Ten Commandments of QR Codes
Tools & Best practices THETHE TEN10 COMMANDMENTSCOMMANDMENTS OF QR CODES QTThehe rreferenceefeRrence g guideuidCe b obookokO DES T h e 1 0 C o m m a n d m e n t s Q R C o d e s by Unitag Introduction To be efficient a QR Code campaign has to be structured and organized. In order to do so you will be introduced to 10 rules through this guide. They will give you the necessary knowledge to correctly use QR Codes. You will then be able to design your marketing campaigns while being confident in the added value of the operation and the impact on your consumers. In this guide Unitag also details good and bad examples of QR Code campaigns so that you make the best choices and avoid common mistakes. After which you will have all the necessary assets to make your QR Code event successful. Follow the guide ! www.unitaglive.com QR Code Guide .2 Summary QR Code presentation 4 10 rules about QR Codes 7 I. Choose your QR Code type II. Customize your QR Code III. Use contrasting colors IV. Adapt the size of your QR Code V. Choose the correct printing support VI. Optimize your QR Code’s visibility VII. Ensure that you are in an area with WiFi / Data service VIII. Explain how to use your QR Code IX. Offer some added value X. Make your QR Code leads to a mobile website www.unitaglive.com QR Code Guide .3 PRESENTATION What is a QR Code? A QR Code? This is that small square, often black-and-white, that one can found more and more frequently on advertisements. -

QR Code How-To Guide
QR Code How-To Guide Prepared by the Association of Nova Scotia Museums For the Canadian Heritage Information Network’s (CHIN) Professional Exchange Table of Contents Introduction ● What are QR codes? ● QR Codes and Museums ○ Potential ○ Precedent How To ● Who can use QR codes? ○ The Phone ○ The Applications ○ The Connection ■Data ■Wifi ■ Security ● Short URLs and Tracking Codes ● Generating QR Codes ● Testing Codes ● Installing Codes Creating Content ● Suggested Content ○ Readings from Books ○ Oral History ○ Photo Slideshows ○ Single Photos ○ Database Records ○ Audio Tours About the ANSM Project Appendix A: Cultural Institutions and QR Codes Appendix B: Detailed Project How-Tos ● From Photos to Codes: Making and Uploading a Photo Slideshow with Picasa ● General Hints for Shooting Video ● Windows Movie Maker ● Editing Audio with Audacity or Garage Band Appendix C: Web and Software Resources ● QR Code Readers ○ Phone ○ Desktop ● Other Helpful Web Resources ● Software Appendix D: Glossary Introduction What are QR codes? A QR code is a type of barcode that can hold more information than the familiar kind scanned at checkouts around the country. The “QR” stands for “quick response,” a reference to the speed at which the large amounts of information they contain can be decoded by scanners. They were invented in 1994 in Japan and initially used for tracking shipping. As the code can be easily decoded by the camera of a BlackBerry, iPhone or other smartphone, this technology is increasingly accessible to the average person. Instead of tracking car parts and packages, the codes can work with the phone’s Internet browser to direct the visitor to online content quickly and efficiently. -
WHITE PAPER Non-NFC Based Mobile SEPA Card Proximity Payments
WHITE PAPER Non-NFC based Mobile SEPA Card Proximity Payments EPC109-19 2019 Version 1.0 Date issued: 7 June 2019 Reason for issue: Publication on EPC website WHITE PAPER Non-NFC based Mobile SEPA Card Proximity Payments EPC109-19 / Version 1.0 / Date of publication: 7 June 2019 © 2019 Copyright European Payments Council (EPC) AISBL: Subject to EPC’s prior written approval, reproduction for non-commercial purposes is authorised, with acknowledgement of the source. www.epc-cep.eu 1 / 49 WHITE PAPER Non-NFC based Mobile SEPA Card Proximity Payments EPC109-19 2019 Version 1.0 Date issued: 7 June 2019 Reason for issue: Publication on EPC website Abstract This document provides insights into non-NFC based Mobile SEPA Card Proximity Payments (MCPPs). www.epc-cep.eu 2 / 49 WHITE PAPER Non-NFC based Mobile SEPA Card Proximity Payments EPC109-19 Version 1.0 Table of Contents Executive Summary ..................................................................................................................5 0 Document Information.......................................................................................................7 0.1 Structure of the document ......................................................................................................... 7 0.2 References ................................................................................................................................... 7 0.3 Definitions .................................................................................................................................. -

User Guide © Copyright 2017 HP Development Company, L.P
User Guide © Copyright 2017 HP Development Company, L.P. Windows is either a registered trademark or trademark of Microsoft Corporation in the United States and/or other countries. Confidential computer software. Valid license from HP required for possession, use or copying. Consistent with FAR 12.211 and 12.212, Commercial Computer Software, Computer Software Documentation, and Technical Data for Commercial Items are licensed to the U.S. Government under vendor's standard commercial license. The information contained herein is subject to change without notice. The only warranties for HP products and services are set forth in the express warranty statements accompanying such products and services. Nothing herein should be construed as constituting an additional warranty. HP shall not be liable for technical or editorial errors or omissions contained herein. First Edition: May 2017 Document Part Number: 923653-001 Table of contents 1 Programming the interface ............................................................................................................................ 1 USB HID .................................................................................................................................................................. 1 2 Input/output settings .................................................................................................................................... 2 Manual trigger modes ........................................................................................................................................... -

UID QUARTERLY: Winter 2011 Tracking Solutions
TrackIng SolutionS UID QUARTERLY: WInter 2011 InTRoDUcTIon Welcome to the UID Quarterly Winter 2011 Edition, brought to you by A2B Tracking Solutions as an educational service. We think you will find Bar code History: Fifty years ago, May 1961 to be exact, the first bar a great deal of practical and useful information here. Read each article code scanner was installed and tested on the Boston & Maine RR. This carefully and then pass along the Quarterly to a friend or colleague who project marked the dawn of the bar code industry and forever changed could benefit from reading it. the economic landscape. Read a first-hand account by the man who What you’ll find in this issue: headed that project UID Education: Check out the upcoming IUID and Track & Trace web UID Success: Learn how the US Air Force is utilizing a seek and apply seminar dates presented by David Collins of Data Capture Institute. part marking strategy, not only to satisfy UID requirements for legacy equipment, but to cleanse the data in its equipment database. news From A2B Tracking: Read all the latest from A2B. The AF part marking effort began as UID SUccESS a pilot in 2009 when A2B was tasked Air Force IUID Part Marking with marking a single base - MacDill A2B achieves “lift off” for enterprise-wide seek and apply marking AFB. That effort ran concurrently with an AF “organic” part marking Air Force has been a frontrunner in the rollout of IUID since it was effort at five other locations. Using introduced in 2003.