Dynamics in Special Relativity
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

26-2 Spacetime and the Spacetime Interval We Usually Think of Time and Space As Being Quite Different from One Another
Answer to Essential Question 26.1: (a) The obvious answer is that you are at rest. However, the question really only makes sense when we ask what the speed is measured with respect to. Typically, we measure our speed with respect to the Earth’s surface. If you answer this question while traveling on a plane, for instance, you might say that your speed is 500 km/h. Even then, however, you would be justified in saying that your speed is zero, because you are probably at rest with respect to the plane. (b) Your speed with respect to a point on the Earth’s axis depends on your latitude. At the latitude of New York City (40.8° north) , for instance, you travel in a circular path of radius equal to the radius of the Earth (6380 km) multiplied by the cosine of the latitude, which is 4830 km. You travel once around this circle in 24 hours, for a speed of 350 m/s (at a latitude of 40.8° north, at least). (c) The radius of the Earth’s orbit is 150 million km. The Earth travels once around this orbit in a year, corresponding to an orbital speed of 3 ! 104 m/s. This sounds like a high speed, but it is too small to see an appreciable effect from relativity. 26-2 Spacetime and the Spacetime Interval We usually think of time and space as being quite different from one another. In relativity, however, we link time and space by giving them the same units, drawing what are called spacetime diagrams, and plotting trajectories of objects through spacetime. -

Thermodynamics of Spacetime: the Einstein Equation of State
gr-qc/9504004 UMDGR-95-114 Thermodynamics of Spacetime: The Einstein Equation of State Ted Jacobson Department of Physics, University of Maryland College Park, MD 20742-4111, USA [email protected] Abstract The Einstein equation is derived from the proportionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat, entropy, and temperature. The key idea is to demand that this relation hold for all the local Rindler causal horizons through each spacetime point, with δQ and T interpreted as the energy flux and Unruh temperature seen by an accelerated observer just inside the horizon. This requires that gravitational lensing by matter energy distorts the causal structure of spacetime in just such a way that the Einstein equation holds. Viewed in this way, the Einstein equation is an equation of state. This perspective suggests that it may be no more appropriate to canonically quantize the Einstein equation than it would be to quantize the wave equation for sound in air. arXiv:gr-qc/9504004v2 6 Jun 1995 The four laws of black hole mechanics, which are analogous to those of thermodynamics, were originally derived from the classical Einstein equation[1]. With the discovery of the quantum Hawking radiation[2], it became clear that the analogy is in fact an identity. How did classical General Relativity know that horizon area would turn out to be a form of entropy, and that surface gravity is a temperature? In this letter I will answer that question by turning the logic around and deriving the Einstein equation from the propor- tionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat Q, entropy S, and temperature T . -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Lecture 17 Relativity A2020 Prof. Tom Megeath What Are the Major Ideas
4/1/10 Lecture 17 Relativity What are the major ideas of A2020 Prof. Tom Megeath special relativity? Einstein in 1921 (born 1879 - died 1955) Einstein’s Theories of Relativity Key Ideas of Special Relativity • Special Theory of Relativity (1905) • No material object can travel faster than light – Usual notions of space and time must be • If you observe something moving near light speed: revised for speeds approaching light speed (c) – Its time slows down – Its length contracts in direction of motion – E = mc2 – Its mass increases • Whether or not two events are simultaneous depends on • General Theory of Relativity (1915) your perspective – Expands the ideas of special theory to include a surprising new view of gravity 1 4/1/10 Inertial Reference Frames Galilean Relativity Imagine two spaceships passing. The astronaut on each spaceship thinks that he is stationary and that the other spaceship is moving. http://faraday.physics.utoronto.ca/PVB/Harrison/Flash/ Which one is right? Both. ClassMechanics/Relativity/Relativity.html Each one is an inertial reference frame. Any non-rotating reference frame is an inertial reference frame (space shuttle, space station). Each reference Speed limit sign posted on spacestation. frame is equally valid. How fast is that man moving? In contrast, you can tell if a The Solar System is orbiting our Galaxy at reference frame is rotating. 220 km/s. Do you feel this? Absolute Time Absolutes of Relativity 1. The laws of nature are the same for everyone In the Newtonian universe, time is absolute. Thus, for any two people, reference frames, planets, etc, 2. -
Chapter 2: Minkowski Spacetime
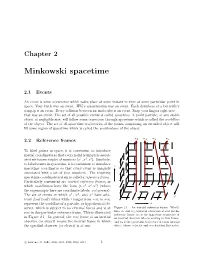
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

A Geometric Introduction to Spacetime and Special Relativity
A GEOMETRIC INTRODUCTION TO SPACETIME AND SPECIAL RELATIVITY. WILLIAM K. ZIEMER Abstract. A narrative of special relativity meant for graduate students in mathematics or physics. The presentation builds upon the geometry of space- time; not the explicit axioms of Einstein, which are consequences of the geom- etry. 1. Introduction Einstein was deeply intuitive, and used many thought experiments to derive the behavior of relativity. Most introductions to special relativity follow this path; taking the reader down the same road Einstein travelled, using his axioms and modifying Newtonian physics. The problem with this approach is that the reader falls into the same pits that Einstein fell into. There is a large difference in the way Einstein approached relativity in 1905 versus 1912. I will use the 1912 version, a geometric spacetime approach, where the differences between Newtonian physics and relativity are encoded into the geometry of how space and time are modeled. I believe that understanding the differences in the underlying geometries gives a more direct path to understanding relativity. Comparing Newtonian physics with relativity (the physics of Einstein), there is essentially one difference in their basic axioms, but they have far-reaching im- plications in how the theories describe the rules by which the world works. The difference is the treatment of time. The question, \Which is farther away from you: a ball 1 foot away from your hand right now, or a ball that is in your hand 1 minute from now?" has no answer in Newtonian physics, since there is no mechanism for contrasting spatial distance with temporal distance. -
Chapter S3: Spacetime and Gravity
Chapter S3 Lecture Chapter S3: Spacetime and Gravity © 2017 Pearson Education, Inc. Spacetime and Gravity © 2017 Pearson Education, Inc. S3.1 Einstein's Second Revolution • Our goals for learning: • What are the major ideas of general relativity? • What is the fundamental assumption of general relativity? © 2017 Pearson Education, Inc. What are the major ideas of general relativity? © 2017 Pearson Education, Inc. Spacetime • Special relativity showed that space and time are not absolute. • Instead, they are inextricably linked in a four-dimensional combination called spacetime. © 2017 Pearson Education, Inc. Curved Space • Travelers going in opposite directions in straight lines will eventually meet. • Because they meet, the travelers know Earth's surface cannot be flat—it must be curved. © 2017 Pearson Education, Inc. Curved Spacetime • Gravity can cause two space probes moving around Earth to meet. • General relativity says this happens because spacetime is curved. © 2017 Pearson Education, Inc. Rubber Sheet Analogy • Matter distorts spacetime in a manner analogous to how heavy weights distort a rubber sheet. © 2017 Pearson Education, Inc. Key Ideas of General Relativity • Gravity arises from distortions of spacetime. • Time runs slowly in gravitational fields. • Black holes can exist in spacetime. • The universe may have no boundaries and no center but may still have finite volume. • Rapid changes in the motion of large masses can cause gravitational waves. © 2017 Pearson Education, Inc. What is the fundamental assumption of general relativity? © 2017 Pearson Education, Inc. Relativity and Acceleration • Our thought experiments about special relativity involved spaceships moving at constant velocity. • Is all motion still relative when acceleration and gravity enter the picture? © 2017 Pearson Education, Inc. -

2.8 Spacetime Diagrams 1 2.8 Spacetime Diagrams
2.8 Spacetime Diagrams 1 2.8 Spacetime Diagrams Note. We cannot (as creatures stuck in 3 physical dimensions) draw the full 4 dimensions of spacetime. However, for rectilinear or planar motion, we can depict a particle’s movement. We do so with a spacetime diagram in which spatial axes (one or two) are drawn as horizontal axes and time is represented by a vertical axis. In the xt−plane, a particle with velocity β is a line of the form x = βt (a line of slope 1/β): Two particles with the following spacetime coordinates must be in collision: Note. The picture on the cover of the text is the graph of the orbit of the Earth as it goes around the Sun as plotted in a 3-D spacetime. 2.8 Spacetime Diagrams 2 Definition. The curve in 4-dimensional spacetime which represents the relation- ships between the spatial and temporal locations of a particle is the particle’s world-line. Note. Now let’s represent two inertial frames of reference S and S0 (considering only the xt−plane and the x0t0−plane). Draw the x and t axes as perpendicular (as above). If the systems are such that x = 0 and x0 = 0 coincide at t = t0 = 0, then the point x0 = 0 traces out the path x = βt in S. We define this as the t0 axis: The hyperbola t2 − x2 = 1 in S is the same as the “hyperbola” t02 − x02 = 1 in S0 (invariance of the interval). So the intersection of this hyperbola and the t0 axis marks one time unit on t0. -

7. Special Relativity
7. Special Relativity Although Newtonian mechanics gives an excellent description of Nature, it is not uni- versally valid. When we reach extreme conditions — the very small, the very heavy or the very fast — the Newtonian Universe that we’re used to needs replacing. You could say that Newtonian mechanics encapsulates our common sense view of the world. One of the major themes of twentieth century physics is that when you look away from our everyday world, common sense is not much use. One such extreme is when particles travel very fast. The theory that replaces New- tonian mechanics is due to Einstein. It is called special relativity.Thee↵ectsofspecial relativity become apparent only when the speeds of particles become comparable to the speed of light in the vacuum. The speed of light is 1 c =299792458ms− This value of c is exact. It may seem strange that the speed of light is an integer when measured in meters per second. The reason is simply that this is taken to be the definition of what we mean by a meter: it is the distance travelled by light in 1/299792458 seconds. For the purposes of this course, we’ll be quite happy with the 8 1 approximation c 3 10 ms− . ⇡ ⇥ The first thing to say is that the speed of light is fast. Really fast. The speed of 1 4 1 sound is around 300 ms− ;escapevelocityfromtheEarthisaround10 ms− ;the 5 1 orbital speed of our solar system in the Milky Way galaxy is around 10 ms− . As we shall soon see, nothing travels faster than c. -

Visualization of Thomas-Wigner Rotations
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 2 November 2017 doi:10.20944/preprints201711.0016.v1 Peer-reviewed version available at Symmetry 2017, 9, 292; doi:10.3390/sym9120292 Article Visualization of Thomas-Wigner Rotations Georg Beyerle ID GFZ German Research Centre for Geosciences, Potsdam, Germany; [email protected] 1 Abstract: It is well known that a sequence of two non-collinear Lorentz boosts (pure Lorentz 2 transformations) does not correspond to a Lorentz boost, but involves a spatial rotation, the Wigner 3 or Thomas-Wigner rotation. We visualize the interrelation between this rotation and the relativity of 4 distant simultaneity by moving a Born-rigid object on a closed trajectory in several steps of uniform 5 proper acceleration. Born-rigidity implies that the stern of the boosted object accelerates faster than 6 its bow. It is shown that at least five boost steps are required to return the object’s center to its starting 7 position, if in each step the center is assumed to accelerate uniformly and for the same proper time 8 duration. With these assumptions, the Thomas-Wigner rotation angle depends on a single parameter 9 only. Furthermore, it is illustrated that accelerated motion implies the formation of an event horizon. 10 The event horizons associated with the five boosts constitute a natural boundary to the rotated 11 Born-rigid object and ensure its finite size. 12 Keywords: special relativity; Thomas-Wigner rotation; visualization 13 1. Introduction 14 In 1926 the British physicist L. H. Thomas (1903–1992) resolved a discrepancy between observed 15 line splittings of atomic spectra in an external magnetic field (Zeeman effect) and theoretical calculations 16 at that time [see e.g. -

Funky Relativity Concepts the Anti-Textbook* a Work in Progress
Funky Relativity Concepts The Anti-Textbook* A Work In Progress. See elmichelsen.physics.ucsd.edu/ for the latest versions of the Funky Series. Please send me comments. Eric L. Michelsen Image Source: http://www.space.com/. Need better graphic?? “A person starts to live when he can live outside himself.” “Weakness of attitude becomes weakness of character.” “We can’t solve problems by using the same kind of thinking we used when we created them.” “Once we accept our limits, we go beyond them.” “If we knew what we were doing, it would not be called ‘research’, would it?” --Albert Einstein * Physical, conceptual, geometric, and pictorial physics that didn’t fit in your textbook. Instead of distributing this document, please link to elmichelsen.physics.ucsd.edu/FunkyRelativityConcepts.pdf . Please cite as: Michelsen, Eric L., Funky Relativity Concepts, elmichelsen.physics.ucsd.edu, 4/26/2021. Physical constants: 2006 values from NIST. For more, see http://physics.nist.gov/cuu/Constants/ . Gravitational constant G = 6.674 28(67) x 10–11 m3 kg–1 s–2 Relative standard uncertainty 1.0 x 10–4 Speed of light in vacuum c = 299 792 458 m s–1 (exact) Boltzmann constant k = 1.380 6504(24) x 10–23 J K–1 Stefan-Boltzmann constant σ = 5.670 400(40) x 10–8 W m–2 K–4 –6 Relative standard uncertainty ±7.0 x 10 23 –1 Avogadro constant NA, L = 6.022 141 79(30) x 10 mol Relative standard uncertainty ±5.0 x 10–8 Molar gas constant R = 8.314 472(15) J mol-1 K-1 calorie 4.184 J (exact) –31 Electron mass me = 9.109 382 15(45) x 10 kg –27 Proton mass mp = 1.672 -

Visualizing Curved Spacetime Rickard M
Visualizing curved spacetime Rickard M. Jonssona) Department of Theoretical Physics, Physics and Engineering Physics, Chalmers University of Technology and Go¨teborg University, 412 96 Gothenburg, Sweden ͑Received 23 April 2003; accepted 8 October 2004͒ I present a way to visualize the concept of curved spacetime. The result is a curved surface with local coordinate systems ͑Minkowski systems͒ living on it, giving the local directions of space and time. Relative to these systems, special relativity holds. The method can be used to visualize gravitational time dilation, the horizon of black holes, and cosmological models. The idea underlying the illustrations is first to specify a field of timelike four-velocities u. Then, at every point, one performs a coordinate transformation to a local Minkowski system comoving with the given four-velocity. In the local system, the sign of the spatial part of the metric is flipped to create a new metric of Euclidean signature. The new positive definite metric, called the absolute metric, can be covariantly related to the original Lorentzian metric. For the special case of a two-dimensional original metric, the absolute metric may be embedded in three-dimensional Euclidean space as a curved surface. © 2005 American Association of Physics Teachers. ͓DOI: 10.1119/1.1830500͔ I. INTRODUCTION II. INTRODUCTION TO CURVED SPACETIME Consider a clock moving along a straight line. Special Einstein’s theory of gravity is a geometrical theory and is relativity tells us that the clock will tick more slowly than the well suited to be explained by images. For instance, the way clocks at rest as illustrated in Fig.