Micro-Electromechanical System Based Electric
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
02-04-00024 Equipment Deep Freezer Compressor 10 Model
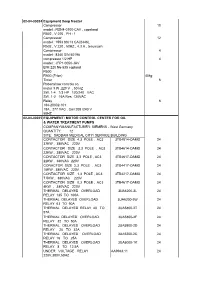
02-04-00024 Equipment Deep freezer Compressor 10 model : RSN4-0100-CAV , copeland R502 , V 220 , PH : 1 Compressor 12 model : 1553 89J13 CAJ2446L R502 , V 220 , 50HZ , 4.3 A , tecumseh Compressor 4 model : 8340 S/N 50198 compressor 1/2 HP 4 model : JFP1-0050-JAV B/M 220 N6-535 copland R500 R500 (Frion) 40kg Timer 6 Robertshaw controls co. motor 3 W ,220 V , 50 HZ SW. 1-4 1/3 HP 120/240 VAC SW. 1-2 15A Res. 120VAC Relay 6 184-20302-101 18A , 277 VAC , Coil 208 /240 V 50HZ 02-04-00025 EQUIPMENT: MOTOR CONTROL CENTER FOR OIL & WATER TREATMENT PUMPS COMPANY\MANUFACTURER: SIEMENS - West Germany QUANTITY: 12 SITE: SADDAM MEDICAL CITY\ SERVICE BUILDING CONTACTOR SIZE 4.3 POLE , AC3 3TB4814-OAMO 24 37KW , 380VAC 220V CONTACTOR SIZE 3,3 POLE , AC3 3TB4614-OAMO 24 22KW , 380VAC 220V CONTACTOR SIZE 3,3 POLE , AC3 3TB4617-OAMO 24 22KW , 380VAC 220V CONACTOR SIZE 2,3 POLE , AC3 3TB4417-OAMO 24 15KW , 380VAC 220V CONTACTOR SIZE 1,3 POLE , AC3 3TB4217-OAMO 24 7.5KW , 380VAC 220V CONTACTOR SIZE 0,3 POLE , AC3 3TB4617-OAMO 24 4KW , 380VAC 220V THERMAL DELAYED OVERLOAD 3UA6200-3L 24 RELAY 135 TO 160A THERMAL DELAYED OVERLOAD 3UA6200-2W 24 RELAY 63 TO 90A THERMAL DELAYED RELAY 40 TO 3UA5800-2T 24 57A THERMAL DELAYED OVERLOAD 3UA5800-2F 24 RELAY 32 TO 50A THERMAL DELAYED OVERLOAD 3UA5800-2D 24 RELAY 20 TO 32A THERMAL DELAYED OVERLOAD 3UA5200-2C 24 RELAY 16 TO 25A THERMAL DELAYED OVERLOAD 3UA5000-1K 24 RELAY 8 TO 12.5A UNDER VOLTAGE RELAY AA9943.11 24 220V,380V,50HZ UNDER VOLTAGE RELAY 220 V, A1936.00 24 50HZ STAR-DELTA TIME RELAY 2-20 SEC 7PU6040-7NN20 24 -

Applying Precision Switches
MICRO SWITCH General Technical Bulletin No. 14 APPLYING PRECISION SWITCHES General Technical Bulletin #14 - Applying Precision Switches TABLE OF CONTENTS INTRODUCTION......................................................................................................................................................................1 BRIEF HISTORY OF THE PRECISION SWITCH ..............................................................................................................1 I. THE MECHANICAL CHARACTERISTICS OF A PRECISION SWITCH...................................................................5 A. MECHANICAL ACTION AND TERMINOLOGY..........................................................................................................................5 B. THE RELATION BETWEEN PLUNGER FORCE AND PLUNGER POSITION....................................................................................6 C. THE RELATION BETWEEN CONTACT FORCE AND PLUNGER POSITION....................................................................................8 D. CONTACT BOUNCE AND TRANSIT TIME................................................................................................................................9 E. POLES, THROWS AND BREAKS............................................................................................................................................10 II. THE ELECTRICAL CHARACTERISTICS OF A PRECISION SWITCH................................................................11 A. THE RESISTANCE OF AN OPEN SWITCH...............................................................................................................................11 -
Switching Operator's Manual Distribution Switching
Switching Operator’s Manual Distribution Switching Document Number: 5011675 SECTION ONE Introduction: Distribution Switching Table of Contents 1. Introduction: Distribution Switching ...................................................... 1-1 1.1 Purpose .............................................................................................. 1-1 1.2 Content .............................................................................................. 1-1 1.2.1 Manual One .................................................................................... 1-1 1.2.2 Manual Two .................................................................................... 1-3 1.3 Switching Operator Authorisation Levels ............................................ 1-3 i Switching Operator's Manual One List of Figures No table of figures entries found. List of Tables No table of figures entries found. ii 1. Introduction: Distribution Switching 1.1 Purpose Manual One provides the switching operator with information on the distribution network configuration, apparatus and switching operations. The manual covers the Horizon Power distribution networks associated with the microgrid and Pilbara Grid systems. Manual Two provides the switching operator with information on the transmission network configuration, apparatus and switching operations. This manual covers the transmission network associated with the Pilbara Grid. Both manuals are intended to be used as a resource for all switching operators and also a major resource for the training modules in -

Overload Protection
Overload Protection Before discussing specific control components, it is necessary to review what an overload is and what steps can be taken to limit the damage an overload can cause. Current and Temperature Current flow in a conductor always generates heat due to resistance. The greater the current flow, the hotter the conductor. Excess heat is damaging to electrical components. For that reason, conductors have a rated continuous current carrying capacity or ampacity. Overcurrent protection devices are used to protect conductors from excessive current flow. Thermal overload relays are designed to protect the conductors (windings) in a motor. These protective devices are designed to keep the flow of current in a circuit at a safe level to prevent the circuit conductors from overheating. 22 Excessive current is referred to as overcurrent. The National Electrical Code® defines overcurrent as any current in excess of the rated current of equipment or the ampacity of a conductor. It may result from overload, short circuit, or ground fault (Article 100-definitions). Short Circuits When two bare conductors touch, a short circuit occurs. When a short circuit occurs, resistance drops to almost zero. Short- circuit current can be thousands of times higher than normal operating current. Ohm’s Law demonstrates the relationship of current, voltage, and resistance. For example, a 240 volt motor with 24 ohms of resistance would normally draw 10 amps of current. When a short circuit develops, resistance drops. If resistance drops to 24 milliohms, current will be 10,000 amps. The heat generated by this current will cause extensive damage to connected equipment and conductors. -

Switches C&K 7107
S.P.D.T. ON-OFF-(ON) SWITCHES C&K 7107. SPDT, center-off, momentary (brackets) indicate momentary position one direction, miniature toggle switch. Rated 0.4VA. Plain, 1/4" unthreaded SUB MINIATURE TOGGLE bushing. Flat toggle handle. Horizontal 0.2" dia. threaded bushing unless otherwise noted. switching action. Right-angle pc pins. CAT# MTS-69 $1.00 each S.P.D.T. ON-ON Rated: 1.5 amp @ 250 Vac. D.P.D.T. ON-OFF-ON Solder lug terminals. 0.4” long bat handle. RATED: 3 amp @ 120 Vac. CAT# SMTS-4 $1.35 each Threaded bushing. Solder lug terminals. 10 for $12.50 • 100 for $110.00 0.43" long handle. CAT# MTS-12 $1.85 each D.P.D.T. ON-ON 10 for $17.00 • 100 for $145.00 Rated: 1.5 amp @ 250 Vac. DPDT, CENTER-OFF Solder lug terminals. 0.4” long bat handle. NEW CAT# SMTS-8 $1.75 each MINI-TOGGLE SWITCH ALCO # MTA206P. Miniature 10 for $15.50 • 100 for $135.00 D.P.D.T. ON-OFF-ON toggle switch. 1/4-40 threaded bushing. 0.43" long S.P.D.T. ON-ON handle. Rated: 6A 125 Vac, 3A 250 Vac. NKK # G3T-12. Tiny surface-mount toggle Epoxy sealed gold-plated solder terminals. switch rated 0.4VA 28VAC/DC. Right angle CAT# MTA-206P $6.75 each mounting. Toggle action is parallel to pc board. 8.5 x 9.0 x 5.6mm. Surface mount pads. D.P.D.T. ON-OFF-ON CAT# TSMT-4 $1.75 each • 10 for $15.50 RATED: 6 Amp @ 125 Vac, 2 Amp 250 Vac. -

Project #6: Building a Shed
Project #6: Building a Shed Lesson #4: Electrical (20 class periods) Objectives Students will be able to… . Understand the progress of using electricity in housing. Develop and apply basic skills in electrical wiring work. Find at least three codes in the NEC that govern electrical construction. Students practice calculating current, resistance, and voltage. Given the power equation, calculate the power consumed in a circuit or load. Name and identify electrical symbols while reading electrical plans . Layout and install a circuit from blueprints. Identify the tools and equipment used by electricians today. Define terms related to electrical safety. Identify electrical wiring tools and materials. Demonstrate safe working procedures in a construction and shop/lab environment. Work cooperatively as a member of a team. Identify electrical hazards and how to avoid or minimize them in the workplace. Common Core Standards LS 11-12.6 RSIT 11-12.2 RLST 11-12.2 Writing 9-10.5 Geometry 4.0 Residential and Commercial Construction pathway D2.8, D3.1, D11.1, D11.2, D11.3, D11.4, D11.9, D11.11 Problem Solving and Critical Thinking 5.2, 5.3, 5.4 Health and Safety 6.2, 6.3, 6.7, 6.10 Responsibility and Leadership 7.3, 7.4, 7.5, 7.6, 7.7, 9.2, 9.3, 9.6, 9.7 Materials © BITA: A program promoted by California Homebuilding Foundation BUILDING INDUSTRY TECHNOLOGY ACADEMY: YEAR TWO CURRICULUM Electrical history terms handout and worksheet History of Wire and Cable Systems Handout History of Wire and Cable Systems Worksheet YouTube Video https://www.youtube.com/watch?v=SdjyNoWQX5k -
An Access-Dictionary of Internationalist High Tech Latinate English
An Access-Dictionary of Internationalist High Tech Latinate English Excerpted from Word Power, Public Speaking Confidence, and Dictionary-Based Learning, Copyright © 2007 by Robert Oliphant, columnist, Education News Author of The Latin-Old English Glossary in British Museum MS 3376 (Mouton, 1966) and A Piano for Mrs. Cimino (Prentice Hall, 1980) INTRODUCTION Strictly speaking, this is simply a list of technical terms: 30,680 of them presented in an alphabetical sequence of 52 professional subject fields ranging from Aeronautics to Zoology. Practically considered, though, every item on the list can be quickly accessed in the Random House Webster’s Unabridged Dictionary (RHU), updated second edition of 2007, or in its CD – ROM WordGenius® version. So what’s here is actually an in-depth learning tool for mastering the basic vocabularies of what today can fairly be called American-Pronunciation Internationalist High Tech Latinate English. Dictionary authority. This list, by virtue of its dictionary link, has far more authority than a conventional professional-subject glossary, even the one offered online by the University of Maryland Medical Center. American dictionaries, after all, have always assigned their technical terms to professional experts in specific fields, identified those experts in print, and in effect held them responsible for the accuracy and comprehensiveness of each entry. Even more important, the entries themselves offer learners a complete sketch of each target word (headword). Memorization. For professionals, memorization is a basic career requirement. Any physician will tell you how much of it is called for in medical school and how hard it is, thanks to thousands of strange, exotic shapes like <myocardium> that have to be taken apart in the mind and reassembled like pieces of an unpronounceable jigsaw puzzle. -

RED LASER MODULES Plastic Nuts and Rubber O-Ring
LIQUID SENSORS THROUGH-BEAM PHOTO- ELECTRIC SENSOR PAIR FLUID PRESSURE SENSOR Using a 5 Vdc input, the fluid SICK Optics WS15-D1130 / WE15-A1130. pressure sensor provides a Photo-electric sender and receiver 0.25 - 4 Vdc output proportional pair detects the presence to pressure from 0-5" H2O max. of an object when the Typical applications include beam between the two is duct air flow, filter pressure interrupted. When the monitoring, combustion air flow and gaseous beam is broken, the leak detection. Measures 1-5/16" x 17/32" on a receiver produces a current pair of 7/8" long slotted mounting wings. Two that can be used to trigger 3/16" O.D. barbs. 3-pin connector with 3" wire an audio-visual signal or leads for power and output. relay-operated device. CAT # FLS-4 $3.15 each 5 Meter range. Built-in LED alignment and power indicators. Modules are 38 x 21 x LIQUID LEVEL SENSOR 16.2mm and can be front or side-mounted. Float switch closes circuit when float Front-mount hardware is included. Operate on rises to top of switch (end opposite 10-30Vdc. Power supply not included. cULus. leads). Can be used in opposite CAT # OSU-1130 $11.35 pair direction as well to close circuit when water level drops. 0.96" diameter plastic float and 0.35" threaded bushing with RED LASER MODULES plastic nuts and rubber O-ring. 2.64" overall length. 14" pigtail leads. Class IIIA lasers, ≤5mW CAT # FLW-2 $3.35 each Wavelegth: 650mM, red 3-5Vdc operation, < 40mA FLOAT SWITCH WITH INTEGRATED THERMISTOR LASER DIODE Gems Sensors. -
Feb 2021U.S. Parts Pricing List
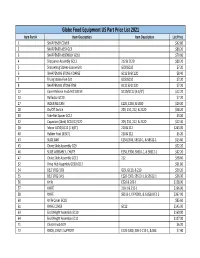
Globe Food Equipment US Part Price List 2021 Item Part # Item Description Item Description List Price 1 SHARPENER COVER $42.80 2 SHARPENER ASSY GC9 $80.20 3 SHARPENER ASSEMBLY GC10 $79.80 4 Sharpener Assembly GC12 212 & 212D $89.20 5 Sharpening Stones‐Coarse Grit GC9/GC10 $7.20 6 SHARPENING STONE‐COARSE GC12 & GC12D $8.40 7 Truing Stone‐Fine Grit GC9/GC10 $7.20 8 SHARPENING STONE‐FINE GC12 & GC12D $7.20 12 Cover Release Knob‐NO SLEEVE GC10/GC12 (6 3/4") $12.20 23 Deflector GC10 $7.20 27 INDEXING CAM E220, E250, & E300 $19.00 28 On/Off Switch 209, 210, 212, & 212D $58.20 30 Slide Bar Spacer GC12 $3.00 32 Capacitor (16mf) GC10/12/12D 209, 210, 212, & 212D $22.40 38 Motor GC10/GC12 (1 5/8") 210 & 212 $243.00 40 Rubber Foot (4/SET) 210 & 212 $5.20 43 SLIDE BAR E250,E300, SBS10‐1, & SBS12‐1 $15.80 45 Chute Slide Assembly GC9 $52.20 46 SLIDE ASSEMBLY, CHUTE E250, E300, SBS10‐1, & SBS12‐1 $62.20 47 Chute Slide Assembly GC12 212 $58.60 52 Drive Hub Assembly GC9/10/12 $61.80 54 BELT (TB2‐330) GC9, GC10, & 210 $39.20 55 BELT (TB2‐345) E220‐E300, SBS10‐1, & SBS12‐1 $36.00 56 Knife E220 & 209‐1 $158.00 57 KNIFE 210‐1 & 212‐1 $196.00 58 KNIFE SBS12‐1,CRP0001, & GUSSLICE1.5 $367.00 60 Knife Cover GC10 $85.60 61 KNIFE COVER GC12 $145.00 63 End Weight Assembly GC10 $160.00 64 End Weight Assembly GC12 $107.00 71 Chute Knob GC9 $6.20 72 KNOB, CHUTE SUPPORT E220‐E300, 209‐1‐212‐1, & SBS $7.40 Globe Food Equipment US Part Price List 2021 Item Part # Item Description Item Description List Price 74 Bottom Enclosure‐Plastic GC10 Prior to S/N 114204 $25.00 76 Bottom Enclosure Nut $1.20 84 INDICATOR LIGHT 110V AC $8.00 85 INTERLOCK N.O. -

Procurement of GOODS
PHILIPPINE BIDDING DOCUMENTS (As Harmonized with Development Partners) Procurement of GOODS Government of the Republic of the Philippines CITY OF ILOILO SUPPLY AND DELIVERY OF TRAINING MATERIALS FOR ELECTRICAL TECHNOLOGY BID NO. 0320 Fifth Edition October 2016 TABLE OF CONTENTS SECTION I. INVITATION TO BID .........................................................................3 SECTION II. INSTRUCTIONS TO BIDDERS ...........................................................6 SECTION III. BID DATA SHEET ..........................................................................6 SECTION IV. GENERAL CONDITIONS OF CONTRACT ....................................... 40 SECTION V. SPECIAL CONDITIONS OF CONTRACT .......................................... 56 SECTION VI. SCHEDULE OF REQUIREMENTS ................................................... 60 SECTION VII. TECHNICAL SPECIFICATIONS .................................................... 62 SECTION VIII. BIDDING FORMS .................. ERROR! BOOKMARK NOT DEFINED. SECTION IX. FOREIGN-ASSISTED PROJECTSERROR! BOOKMARK NOT DEFINED. Section I. Invitation to Bid REPUBLIC OF THE PHILIPPINES CITY OF ILOILO BIDS AND AWARDS COMMITTEE Office of the BAC Secretariat, 7th Floor, Iloilo City Hall, Plaza Libertad, Iloilo City 5000 Philippines Tel No.: 033-3331111 loc. 730 E-mail: [email protected] INVITATION TO BID FOR THE SUPPLY AND DELIVERY OF TRAINING MATERIALS FOR ELECTRICAL TECHNOLOGY 1. The City of Iloilo, through the SEF CY 2019 intends to apply the sum of One Million Four Hundred Thousand Pesos -
SEM Hitachi S-4800 Instruction Manual
INSTRUCTION MANUAL FOR MODEL S-4800 FIELD EMISSION SCANNING ELECTRON MICROSCOPE Please read through this manual carefully before using the instrument. • Before using the instrument, read the safety instructions and precautions carefully. • Keep this manual in a safe place nearby so it can be referred to whenever needed. Copyright © Hitachi High-Technologies Corporation. 2002. All rights reserved. Printed in Japan. Part No. 539-8050 NOTICE: 1. Information contained in this document is subject to change without notice for improvement. 2. This manual is copyrighted by Hitachi High-Technologies Corporation with all rights reserved. No part of this manual may be reproduced, transmitted or disclosed to a third party in any form or by any means without the express written permission of Hitachi High-Technologies Corporation. 3. Hitachi High-Technologies Corporation assumes no liability for any direct, indirect, or consequential damages arising from use not described in this manual. Utmost care must be exercised when using the instrument. 4. This document does not provide any warranty or permission for industrial properties or any rights to grant license lawfully and without infringement. FOREWORD APPLICATION • The S-4800 SEM utilizes electron beam accelerated at 500 V to 30 kV. The instrument is designed mainly for observation and evaluation of specimens prepared for observation using SEM. • Note that Hitachi High-Technologies Corporation will not be responsible for injury or damage caused by usage of the instrument in a manner not described in this manual. CAUTION The electron microscope need not conform to the “Radiation Hazard Preventive Laws” or “Ionizing Radiation Hazard Preventive Regulations” currently in effect throughout the world, unlike the instruments designed to produce x-rays. -

Fiziki Terminlər Və Ifadələr A.I. Muxtarov
AJP FİZİKA 2016 volume XXII №4, section: Az FİZİKİ TERMİNLƏR VƏ İFADƏLƏR A.İ. MUXTAROV BDU, Z. Xəlilov, 23 M.A. MUXTAROV AMEA-nın Riyaziyyat və Mexanika İnstitutu Baki şəh., F. Ağayev küç, 9. T.R. MEHDİYEV, K.B. QURBANOV, E.A. AXUNDOVA, N.A. AXUNDOVA, N.İ. HÜSEYNOVA, S.İ. ƏLİYEVA, E.Ə. ƏLƏSGƏROVA AMEA, akademik H.M. Abdullayev adına Fizika İnstitutu Az-1143, Bakı şəhəri, H. Cavid pr.,131. J j0001 Jamеn intеrfеromеtri Giaime interferometer интерферометр Жамена j0002 Jamеn maqniti Giaime magnet магнит Жамена j0003 Jandis qövs lampası Zhandis arc lamp лампа дуговая Жандиса j0004 jelаtin gelatin желатин j0005 jеlatinli işıq filtri gelatine filter желатиновый светофильтр j0006 jiroskop gyroscope жироскоп j0007 jirostatik mühit gyrostatic medium жиростатическая среда j0008 jirostatik rəqqas gyrostatic pendulum жиростатический маятник j0009 Jordan cəbri Jordan algebra алгебра Жордана j0010 Jordan əyrisi Jordan curve кривая Жордана j0011 Jürеn qanunu Juren law закон Жюрена j0012 Jukovski profili Zhukovski profile профиль Жуковского j0013 Jukovski oturacağı Zhukovski bench скамейка Жуковского j0014 Jukovski tеorеmi Zhukovski theorem теорема Жуковского K k0001 kadmium cadmium кадмий k0002 kadmium (qalvanik) еlеmеnti, cadmium cell, Weston standard cell кадмиевый (гальванический) Vеston normal еlеmеnti элемент, нормальный элемент Вестона k0003 kadmium lampası cadmium lamp кадмиевая лампа k0004 kadmium nisbəti cadmium ratio кадмиевое отношение k0005 kadmium xətti cadmium line кадмиевая линия k0006 kadmium еlеktrodu cadmium electrode кадмиевый электрод