Energy in Deforming Materials
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Potential Energyenergy Isis Storedstored Energyenergy Duedue Toto Anan Objectobject Location.Location
TypesTypes ofof EnergyEnergy && EnergyEnergy TransferTransfer HeatHeat (Thermal)(Thermal) EnergyEnergy HeatHeat (Thermal)(Thermal) EnergyEnergy . HeatHeat energyenergy isis thethe transfertransfer ofof thermalthermal energy.energy. AsAs heatheat energyenergy isis addedadded toto aa substances,substances, thethe temperaturetemperature goesgoes up.up. MaterialMaterial thatthat isis burning,burning, thethe Sun,Sun, andand electricityelectricity areare sourcessources ofof heatheat energy.energy. HeatHeat (Thermal)(Thermal) EnergyEnergy Thermal Energy Explained - Study.com SolarSolar EnergyEnergy SolarSolar EnergyEnergy . SolarSolar energyenergy isis thethe energyenergy fromfrom thethe Sun,Sun, whichwhich providesprovides heatheat andand lightlight energyenergy forfor Earth.Earth. SolarSolar cellscells cancan bebe usedused toto convertconvert solarsolar energyenergy toto electricalelectrical energy.energy. GreenGreen plantsplants useuse solarsolar energyenergy duringduring photosynthesis.photosynthesis. MostMost ofof thethe energyenergy onon thethe EarthEarth camecame fromfrom thethe Sun.Sun. SolarSolar EnergyEnergy Solar Energy - Defined and Explained - Study.com ChemicalChemical (Potential)(Potential) EnergyEnergy ChemicalChemical (Potential)(Potential) EnergyEnergy . ChemicalChemical energyenergy isis energyenergy storedstored inin mattermatter inin chemicalchemical bonds.bonds. ChemicalChemical energyenergy cancan bebe released,released, forfor example,example, inin batteriesbatteries oror food.food. ChemicalChemical (Potential)(Potential) -
An Overview on Principles for Energy Efficient Robot Locomotion
REVIEW published: 11 December 2018 doi: 10.3389/frobt.2018.00129 An Overview on Principles for Energy Efficient Robot Locomotion Navvab Kashiri 1*, Andy Abate 2, Sabrina J. Abram 3, Alin Albu-Schaffer 4, Patrick J. Clary 2, Monica Daley 5, Salman Faraji 6, Raphael Furnemont 7, Manolo Garabini 8, Hartmut Geyer 9, Alena M. Grabowski 10, Jonathan Hurst 2, Jorn Malzahn 1, Glenn Mathijssen 7, David Remy 11, Wesley Roozing 1, Mohammad Shahbazi 1, Surabhi N. Simha 3, Jae-Bok Song 12, Nils Smit-Anseeuw 11, Stefano Stramigioli 13, Bram Vanderborght 7, Yevgeniy Yesilevskiy 11 and Nikos Tsagarakis 1 1 Humanoids and Human Centred Mechatronics Lab, Department of Advanced Robotics, Istituto Italiano di Tecnologia, Genova, Italy, 2 Dynamic Robotics Laboratory, School of MIME, Oregon State University, Corvallis, OR, United States, 3 Department of Biomedical Physiology and Kinesiology, Simon Fraser University, Burnaby, BC, Canada, 4 Robotics and Mechatronics Center, German Aerospace Center, Oberpfaffenhofen, Germany, 5 Structure and Motion Laboratory, Royal Veterinary College, Hertfordshire, United Kingdom, 6 Biorobotics Laboratory, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 7 Robotics and Multibody Mechanics Research Group, Department of Mechanical Engineering, Vrije Universiteit Brussel and Flanders Make, Brussels, Belgium, 8 Centro di Ricerca “Enrico Piaggio”, University of Pisa, Pisa, Italy, 9 Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, United States, 10 Applied Biomechanics Lab, Department of Integrative Physiology, -

UNIVERSITY of CALIFONIA SANTA CRUZ HIGH TEMPERATURE EXPERIMENTAL CHARACTERIZATION of MICROSCALE THERMOELECTRIC EFFECTS a Dissert
UNIVERSITY OF CALIFONIA SANTA CRUZ HIGH TEMPERATURE EXPERIMENTAL CHARACTERIZATION OF MICROSCALE THERMOELECTRIC EFFECTS A dissertation submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in ELECTRICAL ENGINEERING by Tela Favaloro September 2014 The Dissertation of Tela Favaloro is approved: Professor Ali Shakouri, Chair Professor Joel Kubby Professor Nobuhiko Kobayashi Tyrus Miller Vice Provost and Dean of Graduate Studies Copyright © by Tela Favaloro 2014 This work is licensed under a Creative Commons Attribution- NonCommercial-NoDerivatives 4.0 International License Table of Contents List of Figures ............................................................................................................................ vi List of Tables ........................................................................................................................... xiv Nomenclature .......................................................................................................................... xv Abstract ................................................................................................................................. xviii Acknowledgements and Collaborations ................................................................................. xxi Chapter 1 Introduction .......................................................................................................... 1 1.1 Applications of thermoelectric devices for energy conversion ................................... 1 -

Energetics of a Turbulent Ocean
Energetics of a Turbulent Ocean Raffaele Ferrari January 12, 2009 1 Energetics of a Turbulent Ocean One of the earliest theoretical investigations of ocean circulation was by Count Rumford. He proposed that the meridional overturning circulation was driven by temperature gradients. The ocean cools at the poles and is heated in the tropics, so Rumford speculated that large scale convection was responsible for the ocean currents. This idea was the precursor of the thermohaline circulation, which postulates that the evaporation of water and the subsequent increase in salinity also helps drive the circulation. These theories compare the oceans to a heat engine whose energy is derived from solar radiation through some convective process. In the 1800s James Croll noted that the currents in the Atlantic ocean had a tendency to be in the same direction as the prevailing winds. For example the trade winds blow westward across the mid-Atlantic and drive the Gulf Stream. Croll believed that the surface winds were responsible for mechanically driving the ocean currents, in contrast to convection. Although both Croll and Rumford used simple theories of fluid dynamics to develop their ideas, important qualitative features of their work are present in modern theories of ocean circulation. Modern physical oceanography has developed a far more sophisticated picture of the physics of ocean circulation, and modern theories include the effects of phenomena on a wide range of length scales. Scientists are interested in understanding the forces governing the ocean circulation, and one way to do this is to derive energy constraints on the differ- ent processes in the ocean. -
Work and Energy Summary Sheet Chapter 6
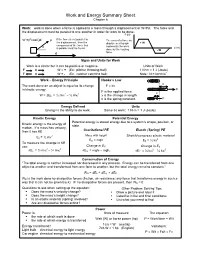
Work and Energy Summary Sheet Chapter 6 Work: work is done when a force is applied to a mass through a displacement or W=Fd. The force and the displacement must be parallel to one another in order for work to be done. F (N) W =(Fcosθ)d F If the force is not parallel to The area of a force vs. the displacement, then the displacement graph + W component of the force that represents the work θ d (m) is parallel must be found. done by the varying - W d force. Signs and Units for Work Work is a scalar but it can be positive or negative. Units of Work F d W = + (Ex: pitcher throwing ball) 1 N•m = 1 J (Joule) F d W = - (Ex. catcher catching ball) Note: N = kg m/s2 • Work – Energy Principle Hooke’s Law x The work done on an object is equal to its change F = kx in kinetic energy. F F is the applied force. 2 2 x W = ΔEk = ½ mvf – ½ mvi x is the change in length. k is the spring constant. F Energy Defined Units Energy is the ability to do work. Same as work: 1 N•m = 1 J (Joule) Kinetic Energy Potential Energy Potential energy is stored energy due to a system’s shape, position, or Kinetic energy is the energy of state. motion. If a mass has velocity, Gravitational PE Elastic (Spring) PE then it has KE 2 Mass with height Stretch/compress elastic material Ek = ½ mv 2 EG = mgh EE = ½ kx To measure the change in KE Change in E use: G Change in ES 2 2 2 2 ΔEk = ½ mvf – ½ mvi ΔEG = mghf – mghi ΔEE = ½ kxf – ½ kxi Conservation of Energy “The total energy is neither increased nor decreased in any process. -
Innovation Insights Brief | 2020
FIVE STEPS TO ENERGY STORAGE Innovation Insights Brief | 2020 In collaboration with the California Independent System Operator (CAISO) ABOUT THE WORLD ENERGY COUNCIL ABOUT THIS INSIGHTS BRIEF The World Energy Council is the principal impartial This Innovation Insights brief on energy storage is part network of energy leaders and practitioners promoting of a series of publications by the World Energy Council an affordable, stable and environmentally sensitive focused on Innovation. In a fast-paced era of disruptive energy system for the greatest benefit of all. changes, this brief aims at facilitating strategic sharing of knowledge between the Council’s members and the Formed in 1923, the Council is the premiere global other energy stakeholders and policy shapers. energy body, representing the entire energy spectrum, with over 3,000 member organisations in over 90 countries, drawn from governments, private and state corporations, academia, NGOs and energy stakeholders. We inform global, regional and national energy strategies by hosting high-level events including the World Energy Congress and publishing authoritative studies, and work through our extensive member network to facilitate the world’s energy policy dialogue. Further details at www.worldenergy.org and @WECouncil Published by the World Energy Council 2020 Copyright © 2020 World Energy Council. All rights reserved. All or part of this publication may be used or reproduced as long as the following citation is included on each copy or transmission: ‘Used by permission of the World -
Hydroelectric Power -- What Is It? It=S a Form of Energy … a Renewable Resource
INTRODUCTION Hydroelectric Power -- what is it? It=s a form of energy … a renewable resource. Hydropower provides about 96 percent of the renewable energy in the United States. Other renewable resources include geothermal, wave power, tidal power, wind power, and solar power. Hydroelectric powerplants do not use up resources to create electricity nor do they pollute the air, land, or water, as other powerplants may. Hydroelectric power has played an important part in the development of this Nation's electric power industry. Both small and large hydroelectric power developments were instrumental in the early expansion of the electric power industry. Hydroelectric power comes from flowing water … winter and spring runoff from mountain streams and clear lakes. Water, when it is falling by the force of gravity, can be used to turn turbines and generators that produce electricity. Hydroelectric power is important to our Nation. Growing populations and modern technologies require vast amounts of electricity for creating, building, and expanding. In the 1920's, hydroelectric plants supplied as much as 40 percent of the electric energy produced. Although the amount of energy produced by this means has steadily increased, the amount produced by other types of powerplants has increased at a faster rate and hydroelectric power presently supplies about 10 percent of the electrical generating capacity of the United States. Hydropower is an essential contributor in the national power grid because of its ability to respond quickly to rapidly varying loads or system disturbances, which base load plants with steam systems powered by combustion or nuclear processes cannot accommodate. Reclamation=s 58 powerplants throughout the Western United States produce an average of 42 billion kWh (kilowatt-hours) per year, enough to meet the residential needs of more than 14 million people. -

The Mechanical Equivalent of Heat
THE MECHANICAL EQUIVALENT OF HEAT INTRODUCTION This is the classic experiment, first performed in 1847 by James Joule, which led to our modern view that mechanical work and heat are but different aspects of the same quantity: energy. The classic experiment related the two concepts and provided a connection between the Joule, defined in terms of mechanical variables (work, kinetic energy, potential energy. etc.) and the calorie, defined as the amount of heat that raises the temperature of 1 gram of water by 1 degree Celsius. Contemporary SI units do not distinguish between heat energy and mechanical energy, so that heat is also measured in Joules. In this experiment, work is done by rubbing two metal cones, which raises the temperature of a known amount of water (along with the cones, stirrer, thermometer, etc,). The ratio of the mechanical work done (W) to the heat which has passed to the water plus parts (Q), determines the constant J (J = W/Q). THE EXPERIMENT CAUTION: The apparatus must not be operated without oil between the cones. The cones have to be cleaned and a tiny drop of oil put between the rubbing surfaces (caution! too much oil will reduce the friction excessively and make the experiment impossible). The apparatus is shown in Figure 1. The heat generated in the system is absorbed by different parts: the water, the inner and outer cones, the stirrer and the immersed part of the temperature probe. The total increase in heat, including all these contributions, is therefore: Q = (MCw + M′Cbr + v Cth) ∆T = constant1 × ∆T (1) -1 -1 Cw = specific heat of water = 1.00 cal g C (by definition of the calorie) -1 ° -1 Cbr = specific heat of brass (cones and stirrer) = 0.089 cal g C -3 ° -1 Cth = heat capacity per unit volume of temperature probe = 0.013 cal cm C M = mass of water (in g) M′ = mass of cones and stirrer (in g) v = volume of the immersed part of the temperature probe (in cm3). -
Hydropower Technologies Program — Harnessing America’S Abundant Natural Resources for Clean Power Generation
U.S. Department of Energy — Energy Efficiency and Renewable Energy Wind & Hydropower Technologies Program — Harnessing America’s abundant natural resources for clean power generation. Contents Hydropower Today ......................................... 1 Enhancing Generation and Environmental Performance ......... 6 Large Turbine Field-Testing ............................... 9 Providing Safe Passage for Fish ........................... 9 Improving Mitigation Practices .......................... 11 From the Laboratories to the Hydropower Communities ..... 12 Hydropower Tomorrow .................................... 14 Developing the Next Generation of Hydropower ............ 15 Integrating Wind and Hydropower Technologies ............ 16 Optimizing Project Operations ........................... 17 The Federal Wind and Hydropower Technologies Program ..... 19 Mission and Goals ...................................... 20 2003 Hydropower Research Highlights Alden Research Center completes prototype turbine tests at their facility in Holden, MA . 9 Laboratories form partnerships to develop and test new sensor arrays and computer models . 10 DOE hosts Workshop on Turbulence at Hydroelectric Power Plants in Atlanta . 11 New retrofit aeration system designed to increase the dissolved oxygen content of water discharged from the turbines of the Osage Project in Missouri . 11 Low head/low power resource assessments completed for conventional turbines, unconventional systems, and micro hydropower . 15 Wind and hydropower integration activities in 2003 aim to identify potential sites and partners . 17 Cover photo: To harness undeveloped hydropower resources without using a dam as part of the system that produces electricity, researchers are developing technologies that extract energy from free flowing water sources like this stream in West Virginia. ii HYDROPOWER TODAY Water power — it can cut deep canyons, chisel majestic mountains, quench parched lands, and transport tons — and it can generate enough electricity to light up millions of homes and businesses around the world. -

Fuel Wise Or Fuelish? Grades 9 to 12
LESSON PLAN Fuel Wise or Fuelish? Grades 9 to 12 SUMMARY LESSON OBJECTIVES In this lesson, the students will explore the different impacts Upon completing this lesson the students will: using alternative fuels has on the economy. • Learn how world events affect supply and demand for The students will research and compare different cars. petroleum; They will determine the cost of operation for one year to • Explore why it is important for South Carolinians to use include price, fuel, insurance, property taxes, title, tag, and alternative fuels; and maintenance, as well as determine the most cost-effective choice of vehicle, based on their research. • Make decisions pertinent to choosing a fuel-efficient car. ESSENTIAL QUESTION How have alternative fuels impacted the economy? DURATION The activity requires about one to two weeks to complete. 2014 S.C. SCIENCE STANDARDS CORRELATIONS Standard H.P.3: The student will demonstrate an understanding of how the interactions among objects can be explained and predicted using the concept of the conservation of energy. CONCEPTUAL UNDERSTANDING H.P.3A.: Work and energy are equivalent to each other. Work is defined as the product of displacement and the force causing that displacement; this results in the transfer of mechanical energy. Therefore, in the case of mechanical energy, energy is seen as the ability to do work. This is called the work-energy principle. The rate at which work is done (or energy is transformed) is called power. For machines that do useful work for humans, the ratio of useful power output is the efficiency of the machine. -

Benefits and Challenges of Mechanical Spring Systems for Energy Storage Applications
Available online at www.sciencedirect.com ScienceDirect Energy Procedia 82 ( 2015 ) 805 – 810 ATI 2015 - 70th Conference of the ATI Engineering Association Benefits and challenges of mechanical spring systems for energy storage applications Federico Rossia, Beatrice Castellania*, Andrea Nicolinia aUniversity of Perugia, Department of Engineering, CIRIAF, Via G. Duranti 67, Perugia Abstract Storing the excess mechanical or electrical energy to use it at high demand time has great importance for applications at every scale because of irregularities of demand and supply. Energy storage in elastic deformations in the mechanical domain offers an alternative to the electrical, electrochemical, chemical, and thermal energy storage approaches studied in the recent years. The present paper aims at giving an overview of mechanical spring systems’ potential for energy storage applications. Part of the appeal of elastic energy storage is its ability to discharge quickly, enabling high power densities. This available amount of stored energy may be delivered not only to mechanical loads, but also to systems that convert it to drive an electrical load. Mechanical spring systems’ benefits and limits for storing macroscopic amounts of energy will be assessed and their integration with mechanical and electrical power devices will be discussed. ©© 2015 2015 The The Authors. Authors. Published Published by Elsevier by Elsevier Ltd. This Ltd. is an open access article under the CC BY-NC-ND license (Selectionhttp://creativecommons.org/licenses/by-nc-nd/4.0/ and/or peer-review under responsibility). of ATI Peer-review under responsibility of the Scientific Committee of ATI 2015 Keywords:energy storage; mechanical springs; energy storage density. 1. -

Mechanical Energy
Chapter 2 Mechanical Energy Mechanics is the branch of physics that deals with the motion of objects and the forces that affect that motion. Mechanical energy is similarly any form of energy that’s directly associated with motion or with a force. Kinetic energy is one form of mechanical energy. In this course we’ll also deal with two other types of mechanical energy: gravitational energy,associated with the force of gravity,and elastic energy, associated with the force exerted by a spring or some other object that is stretched or compressed. In this chapter I’ll introduce the formulas for all three types of mechanical energy,starting with gravitational energy. Gravitational Energy An object’s gravitational energy depends on how high it is,and also on its weight. Specifically,the gravitational energy is the product of weight times height: Gravitational energy = (weight) × (height). (2.1) For example,if you lift a brick two feet off the ground,you’ve given it twice as much gravitational energy as if you lift it only one foot,because of the greater height. On the other hand,a brick has more gravitational energy than a marble lifted to the same height,because of the brick’s greater weight. Weight,in the scientific sense of the word,is a measure of the force that gravity exerts on an object,pulling it downward. Equivalently,the weight of an object is the amount of force that you must exert to hold the object up,balancing the downward force of gravity. Weight is not the same thing as mass,which is a measure of the amount of “stuff” in an object.