Barycentric Coordinates for Arbitrary Polygons in the Plane 1 Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Constrained a Fast Algorithm for Generating Delaunay
004s7949/93 56.00 + 0.00 if) 1993 Pcrgamon Press Ltd A FAST ALGORITHM FOR GENERATING CONSTRAINED DELAUNAY TRIANGULATIONS S. W. SLOAN Department of Civil Engineering and Surveying, University of Newcastle, Shortland, NSW 2308, Australia {Received 4 March 1992) Abstract-A fast algorithm for generating constrained two-dimensional Delaunay triangulations is described. The scheme permits certain edges to be specified in the final t~an~ation, such as those that correspond to domain boundaries or natural interfaces, and is suitable for mesh generation and contour plotting applications. Detailed timing statistics indicate that its CPU time requhement is roughly proportional to the number of points in the data set. Subject to the conditions imposed by the edge constraints, the Delaunay scheme automatically avoids the formation of long thin triangles and thus gives high quality grids. A major advantage of the method is that it does not require extra points to be added to the data set in order to ensure that the specified edges are present. I~RODU~ON to be degenerate since two valid Delaunay triangu- lations are possible. Although it leads to a loss of Triangulation schemes are used in a variety of uniqueness, degeneracy is seldom a cause for concern scientific applications including contour plotting, since a triangulation may always be generated by volume estimation, and mesh generation for finite making an arbitrary, but consistent, choice between element analysis. Some of the most successful tech- two alternative patterns. niques are undoubtedly those that are based on the One major advantage of the Delaunay triangu- Delaunay triangulation. lation, as opposed to a triangulation constructed To describe the construction of a Delaunay triangu- heu~stically, is that it automati~ily avoids the lation, and hence explain some of its properties, it is creation of long thin triangles, with small included convenient to consider the corresponding Voronoi angles, wherever this is possible. -

Triangulation of Simple 3D Shapes with Well-Centered Tetrahedra
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Illinois Digital Environment for Access to Learning and Scholarship Repository TRIANGULATION OF SIMPLE 3D SHAPES WITH WELL-CENTERED TETRAHEDRA EVAN VANDERZEE, ANIL N. HIRANI, AND DAMRONG GUOY Abstract. A completely well-centered tetrahedral mesh is a triangulation of a three dimensional domain in which every tetrahedron and every triangle contains its circumcenter in its interior. Such meshes have applications in scientific computing and other fields. We show how to triangulate simple domains using completely well-centered tetrahedra. The domains we consider here are space, infinite slab, infinite rectangular prism, cube, and regular tetrahedron. We also demonstrate single tetrahedra with various combinations of the properties of dihedral acuteness, 2-well-centeredness, and 3-well-centeredness. 1. Introduction 3 In this paper we demonstrate well-centered triangulation of simple domains in R . A well- centered simplex is one for which the circumcenter lies in the interior of the simplex [8]. This definition is further refined to that of a k-well-centered simplex which is one whose k-dimensional faces have the well-centeredness property. An n-dimensional simplex which is k-well-centered for all 1 ≤ k ≤ n is called completely well-centered [15]. These properties extend to simplicial complexes, i.e. to meshes. Thus a mesh can be completely well-centered or k-well-centered if all its simplices have that property. For triangles, being well-centered is the same as being acute-angled. But a tetrahedron can be dihedral acute without being 3-well-centered as we show by example in Sect. -
Geometry (Lines) SOL 4.14?
Geometry (Lines) lines, segments, rays, points, angles, intersecting, parallel, & perpendicular Point “A point is an exact location in space. It has no length or width.” Points have names; represented with a Capital Letter. – Example: A a Lines “A line is a collection of points going on and on infinitely in both directions. It has no endpoints.” A straight line that continues forever It can go – Vertically – Horizontally – Obliquely (diagonally) It is identified because it has arrows on the ends. It is named by “a single lower case letter”. – Example: “line a” A B C D Line Segment “A line segment is part of a line. It has two endpoints and includes all the points between those endpoints. “ A straight line that stops It can go – Vertically – Horizontally – Obliquely (diagonally) It is identified by points at the ends It is named by the Capital Letter End Points – Example: “line segment AB” or “line segment AD” C B A Ray “A ray is part of a line. It has one endpoint and continues on and on in one direction.” A straight line that stops on one end and keeps going on the other. It can go – Vertically – Horizontally – Obliquely (diagonally) It is identified by a point at one end and an arrow at the other. It can be named by saying the endpoint first and then say the name of one other point on the ray. – Example: “Ray AC” or “Ray AB” C Angles A B Two Rays That Have the Same Endpoint Form an Angle. This Endpoint Is Called the Vertex. -

Unsteadiness in Flow Over a Flat Plate at Angle-Of-Attack at Low Reynolds Numbers∗
Unsteadiness in Flow over a Flat Plate at Angle-of-Attack at Low Reynolds Numbers∗ Kunihiko Taira,† William B. Dickson,‡ Tim Colonius,§ Michael H. Dickinson¶ California Institute of Technology, Pasadena, California, 91125 Clarence W. Rowleyk Princeton University, Princeton, New Jersey, 08544 Flow over an impulsively started low-aspect-ratio flat plate at angle-of-attack is inves- tigated for a Reynolds number of 300. Numerical simulations, validated by a companion experiment, are performed to study the influence of aspect ratio, angle of attack, and plan- form geometry on the interaction of the leading-edge and tip vortices and resulting lift and drag coefficients. Aspect ratio is found to significantly influence the wake pattern and the force experienced by the plate. For large aspect ratio plates, leading-edge vortices evolved into hairpin vortices that eventually detached from the plate, interacting with the tip vor- tices in a complex manner. Separation of the leading-edge vortex is delayed to some extent by having convective transport of the spanwise vorticity as observed in flow over elliptic, semicircular, and delta-shaped planforms. The time at which lift achieves its maximum is observed to be fairly constant over different aspect ratios, angles of attack, and planform geometries during the initial transient. Preliminary results are also presented for flow over plates with steady actuation near the leading edge. I. Introduction In recent years, flows around flapping insect wings have been investigated and, in particular, it has been observed that the leading-edge vortex (LEV) formed during stroke reversal remains stably attached throughout the wing stroke, greatly enhancing lift.1, 2 Such LEVs are found to be stable over a wide range of angles of attack and for Reynolds number over a range of Re ≈ O(102) − O(104). -

Points, Lines, and Planes a Point Is a Position in Space. a Point Has No Length Or Width Or Thickness
Points, Lines, and Planes A Point is a position in space. A point has no length or width or thickness. A point in geometry is represented by a dot. To name a point, we usually use a (capital) letter. A A (straight) line has length but no width or thickness. A line is understood to extend indefinitely to both sides. It does not have a beginning or end. A B C D A line consists of infinitely many points. The four points A, B, C, D are all on the same line. Postulate: Two points determine a line. We name a line by using any two points on the line, so the above line can be named as any of the following: ! ! ! ! ! AB BC AC AD CD Any three or more points that are on the same line are called colinear points. In the above, points A; B; C; D are all colinear. A Ray is part of a line that has a beginning point, and extends indefinitely to one direction. A B C D A ray is named by using its beginning point with another point it contains. −! −! −−! −−! In the above, ray AB is the same ray as AC or AD. But ray BD is not the same −−! ray as AD. A (line) segment is a finite part of a line between two points, called its end points. A segment has a finite length. A B C D B C In the above, segment AD is not the same as segment BC Segment Addition Postulate: In a line segment, if points A; B; C are colinear and point B is between point A and point C, then AB + BC = AC You may look at the plus sign, +, as adding the length of the segments as numbers. -

The Mass of an Asymptotically Flat Manifold
The Mass of an Asymptotically Flat Manifold ROBERT BARTNIK Australian National University Abstract We show that the mass of an asymptotically flat n-manifold is a geometric invariant. The proof is based on harmonic coordinates and, to develop a suitable existence theory, results about elliptic operators with rough coefficients on weighted Sobolev spaces are summarised. Some relations between the mass. xalar curvature and harmonic maps are described and the positive mass theorem for ,c-dimensional spin manifolds is proved. Introduction Suppose that (M,g) is an asymptotically flat 3-manifold. In general relativity the mass of M is given by where glJ, denotes the partial derivative and dS‘ is the normal surface element to S,, the sphere at infinity. This expression is generally attributed to [3]; for a recent review of this and other expressions for the mass and other physically interesting quantities see (41. However, in all these works the definition depends on the choice of coordinates at infinity and it is certainly not clear whether or not this dependence is spurious. Since it is physically quite reasonable to assume that a frame at infinity (“observer”) is given, this point has not received much attention in the literature (but see [15]). It is our purpose in this paper to show that, under appropriate decay conditions on the metric, (0.1) generalises to n-dimensions for n 2 3 and gives an invariant of the metric structure (M,g). The decay conditions roughly stated (for n = 3) are lg - 61 = o(r-’12), lag1 = o(f312), etc, and thus include the usual falloff conditions. -

Triangulations and Simplex Tilings of Polyhedra
Triangulations and Simplex Tilings of Polyhedra by Braxton Carrigan A dissertation submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Doctor of Philosophy Auburn, Alabama August 4, 2012 Keywords: triangulation, tiling, tetrahedralization Copyright 2012 by Braxton Carrigan Approved by Andras Bezdek, Chair, Professor of Mathematics Krystyna Kuperberg, Professor of Mathematics Wlodzimierz Kuperberg, Professor of Mathematics Chris Rodger, Don Logan Endowed Chair of Mathematics Abstract This dissertation summarizes my research in the area of Discrete Geometry. The par- ticular problems of Discrete Geometry discussed in this dissertation are concerned with partitioning three dimensional polyhedra into tetrahedra. The most widely used partition of a polyhedra is triangulation, where a polyhedron is broken into a set of convex polyhedra all with four vertices, called tetrahedra, joined together in a face-to-face manner. If one does not require that the tetrahedra to meet along common faces, then we say that the partition is a tiling. Many of the algorithmic implementations in the field of Computational Geometry are dependent on the results of triangulation. For example computing the volume of a polyhedron is done by adding volumes of tetrahedra of a triangulation. In Chapter 2 we will provide a brief history of triangulation and present a number of known non-triangulable polyhedra. In this dissertation we will particularly address non-triangulable polyhedra. Our research was motivated by a recent paper of J. Rambau [20], who showed that a nonconvex twisted prisms cannot be triangulated. As in algebra when proving a number is not divisible by 2012 one may show it is not divisible by 2, we will revisit Rambau's results and show a new shorter proof that the twisted prism is non-triangulable by proving it is non-tilable. -

Two Algorithms for Constructing a Delaunay Triangulation 1
International Journal of Computer and Information Sciences, Vol. 9, No. 3, 1980 Two Algorithms for Constructing a Delaunay Triangulation 1 D. T. Lee 2 and B. J. Schachter 3 Received July 1978; revised February 1980 This paper provides a unified discussion of the Delaunay triangulation. Its geometric properties are reviewed and several applications are discussed. Two algorithms are presented for constructing the triangulation over a planar set of Npoints. The first algorithm uses a divide-and-conquer approach. It runs in O(Nlog N) time, which is asymptotically optimal. The second algorithm is iterative and requires O(N 2) time in the worst case. However, its average case performance is comparable to that of the first algorithm. KEY WORDS: Delaunay triangulation; triangulation; divide-and-con- quer; Voronoi tessellation; computational geometry; analysis of algorithms. 1. INTRODUCTION In this paper we consider the problem of triangulating a set of points in the plane. Let V be a set of N ~> 3 distinct points in the Euclidean plane. We assume that these points are not all colinear. Let E be the set of (n) straight- line segments (edges) between vertices in V. Two edges el, e~ ~ E, el ~ e~, will be said to properly intersect if they intersect at a point other than their endpoints. A triangulation of V is a planar straight-line graph G(V, E') for which E' is a maximal subset of E such that no two edges of E' properly intersect.~16~ 1 This work was supported in part by the National Science Foundation under grant MCS-76-17321 and the Joint Services Electronics Program under contract DAAB-07- 72-0259. -
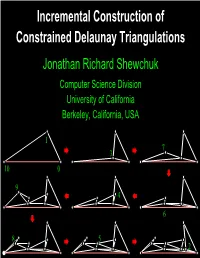
Incremental Construction of Constrained Delaunay Triangulations Jonathan Richard Shewchuk Computer Science Division University of California Berkeley, California, USA
Incremental Construction of Constrained Delaunay Triangulations Jonathan Richard Shewchuk Computer Science Division University of California Berkeley, California, USA 1 7 3 10 0 9 4 6 8 5 2 The Delaunay Triangulation An edge is locally Delaunay if the two triangles sharing it have no vertex in each others’ circumcircles. A Delaunay triangulation is a triangulation of a point set in which every edge is locally Delaunay. Constraining Edges Sometimes we need to force a triangulation to contain specified edges. Nonconvex shapes; internal boundaries Discontinuities in interpolated functions 2 Ways to Recover Segments Conforming Delaunay triangulations Edges are all locally Delaunay. Worst−case input needsΩ (n²) to O(n2.5 ) extra vertices. Constrained Delaunay triangulations (CDTs) Edges are locally Delaunay or are domain boundaries. Goal segments Input: planar straight line graph (PSLG) Output: constrained Delaunay triangulation (CDT) Every edge is locally Delaunay except segments. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Do segment location. Insert segment. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Do segment location. Insert segment. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Do segment location. Insert segment. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Do segment location. Insert segment. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Do segment location. Insert segment. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Do segment location. Insert segment. Randomized Incremental CDT Construction Start with Delaunay triangulation of vertices. Do segment location. Insert segment. Topics Inserting a segment in expected linear time. -

Barycentric Coordinates in Tetrahedrons
Computational Geometry Lab: BARYCENTRIC COORDINATES IN TETRAHEDRONS John Burkardt Information Technology Department Virginia Tech http://people.sc.fsu.edu/∼jburkardt/presentations/cg lab barycentric tetrahedrons.pdf December 23, 2010 1 Introduction to this Lab In this lab we consider the barycentric coordinate system for a tetrahedron. This coordinate system will give us a common map that can be used to relate all tetrahedrons. This will give us a unified way of dealing with the computational tasks that must take into account the varying geometry of tetrahedrons. We start our exploration by asking whether we can come up with an arithmetic formula that measures the position of a point relative to a plane. The formula we arrive at will actually return a signed distance which is positive for points on one side of the plane, and negative on the other side. The extra information that the sign of the distance gives us is enough to help us answer the next question, which is whether we can determine if a point is inside a tetrahedron. This turns out to be simple if we apply the signed distance formula in the right way. The distance function turns out to have another crucial use. Given any face of the tetrahedron, we know that the tetrahedral point that is furthest from that face is the vertex opposite to the face. Therefore, any other point in the tetrahedron has a relative distance to the face that is strictly less than 1. For a given point, if we compute all four possible relative distances, we come up with our crucial barycentric coordinate system. -
Generalized Barycentric Coordinate Finite Element Methods on Polytope Meshes
Generalized Barycentric Coordinate Finite Element Methods on Polytope Meshes Andrew Gillette Department of Mathematics University of Arizona Andrew Gillette - U. ArizonaGBC FEM( ) on Polytope Meshes CERMICS - June 2014 1 / 41 What are a priori FEM error estimates? n n Poisson’s equation in R : Given a domain D ⊂ R and f : D! R, find u such that strong form −∆u = f u 2 H2(D) Z Z weak form ru · rφ = f φ 8φ 2 H1(D) D D Z Z 1 discrete form ruh · rφh = f φh 8φh 2 Vh finite dim. ⊂ H (D) D D Typical finite element method: ! Mesh D by polytopes fPg with vertices fvi g; define h := max diam(P). ! Fix basis functions λi with local piecewise support, e.g. barycentric functions. P ! Define uh such that it uses the λi to approximate u, e.g. uh := i u(vi )λi A linear system for uh can then be derived, admitting an a priori error estimate: p p+1 jju − uhjjH1(P) ≤ Ch jujHp+1(P); 8u 2 H (P); | {z } | {z } approximation error optimal error bound provided that the λi span all degree p polynomials on each polytope P. Andrew Gillette - U. ArizonaGBC FEM( ) on Polytope Meshes CERMICS - June 2014 2 / 41 The generalized barycentric coordinate approach Let P be a convex polytope with vertex set V . We say that λv : P ! R are generalized barycentric coordinates (GBCs) on P X if they satisfy λv ≥ 0 on P and L = L(vv)λv; 8 L : P ! R linear. v2V Familiar properties are implied by this definition: X X λv ≡ 1 vλv(x) = x λvi (vj ) = δij v2V v2V | {z } | {z } | {z } interpolation partition of unity linear precision traditional FEM family of GBC reference elements Unit Affine Map T Bilinear Map Diameter Reference Physical T Ω Ω Element Element Andrew Gillette - U. -

Combinatorial Properties of Complex Hyperplane Arrangements
Combinatorial Properties of Complex Hyperplane Arrangements by Ben Helford A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mathematics Northern Arizona University December 2006 Approved: Michael Falk, Ph.D., Chair N´andor Sieben, Ph.D. Stephen E. Wilson, Ph.D. Abstract Combinatorial Properties of Complex Hyperplane Arrangements Ben Helford Let A be a complex hyperplane arrangement, and M(A) be the com- [ plement, that is C` − H. It has been proven already that the co- H∈A homology algebra of M(A) is determined by its underlying matroid. In fact, in the case where A is the complexification of a real arrangement, one can determine the homotopy type by its oriented matroid. This thesis uses complex oriented matroids, a tool developed recently by D Biss, in order to combinatorially determine topological properties of M(A) for A an arbitrary complex hyperplane arrangement. The first chapter outlines basic properties of hyperplane arrange- ments, including defining the underlying matroid and, in the real case, the oriented matroid. The second chapter examines topological proper- ties of complex arrangements, including the Orlik-Solomon algebra and Salvetti’s theorem. The third chapter introduces complex oriented ma- troids and proves some ways that this codifies topological properties of complex arrangements. Finally, the fourth chapter examines the differ- ence between complex hyperplane arrangements and real 2-arrangements, and examines the problem of formulating the cone/decone theorem at the level of posets. ii Acknowledgements It almost goes without saying in my mind that this thesis could not be possible without the direction and expertise provided by Dr.