Equalizing Loudspeakers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Loudspeakers and Headphones 21 –24 August 2013 Helsinki, Finland
CONFERENCE REPORT AES 51 st International Conference Loudspeakers and Headphones 21 –24 August 2013 Helsinki, Finland CONFERENCE REPORT elsinki, Finland is known for having two sea - An unexpectedly large turnout of 130 people almost sons: August and winter (adapted from Con - overwhelmed the organizers as over 75% of them Hnolly). However, despite some torrential rain in registered around the time of the “early bird” cut-off the previous week, the weather during the conference date. Twenty countries were represented with most of was excellent. The conference was held at the Helsinki the participants coming from Europe, but some came Congress Paasitorni, which was built in the first from as far away as Los Angeles, San Francisco, Lima, decades of the twentieth century. The recently restored Rio de Janeiro, Tokyo, and Guangzhou. Companies building is made of granite that was dug from the such Apple, Beats, Comsol, Bose, Genelec, Harman, ground where the building now stands. The location KEF, Neumann, Nokia, Samsung, Sennheiser, Skype, near the city center and right by the harbor proved to and Sony were represented by their employees. be an excellent location both for transportation and Universities represented included Aalto (in Helsinki), the social program. Aalborg, Budapest, and Kyushu. 790 J. Audio Eng. Soc., Vol. 61, No. 10, 2013 October CONFERENCE REPORT A packed House of Science and Letters for the Tutorial Day Sponsors Juha Backmann insists that “Reproduced audio WILL be better in the future.” J. Audio Eng. Soc., Vol. 61, No. 10, 2013 October 791 CONFERENCE REPORT low-frequency performance can still be designed using Thiele- Small parameters in a simulation, and the effect of individual parameters (such as voice coil length and pole piece size) on the system performance can be seen directly. -
Voip V2 Loudspeaker Amplifier (Wireless) Operations Guide
VoIP V2 Loudspeaker Amplifier (Wireless) Operations Guide Part #011096 Document Part #930361E for Firmware Version 6.0.0 CyberData Corporation 3 Justin Court Monterey, CA 93940 (831) 373-2601 VoIP V2 Paging Amplifier Operations Guide 930361E Part # 011096 COPYRIGHT NOTICE: © 2011, CyberData Corporation, ALL RIGHTS RESERVED. This manual and related materials are the copyrighted property of CyberData Corporation. No part of this manual or related materials may be reproduced or transmitted, in any form or by any means (except for internal use by licensed customers), without prior express written permission of CyberData Corporation. This manual, and the products, software, firmware, and/or hardware described in this manual are the property of CyberData Corporation, provided under the terms of an agreement between CyberData Corporation and recipient of this manual, and their use is subject to that agreement and its terms. DISCLAIMER: Except as expressly and specifically stated in a written agreement executed by CyberData Corporation, CyberData Corporation makes no representation or warranty, express or implied, including any warranty or merchantability or fitness for any purpose, with respect to this manual or the products, software, firmware, and/or hardware described herein, and CyberData Corporation assumes no liability for damages or claims resulting from any use of this manual or such products, software, firmware, and/or hardware. CyberData Corporation reserves the right to make changes, without notice, to this manual and to any such product, software, firmware, and/or hardware. OPEN SOURCE STATEMENT: Certain software components included in CyberData products are subject to the GNU General Public License (GPL) and Lesser GNU General Public License (LGPL) “open source” or “free software” licenses. -

The Frequency Element: Using the Equalizer
Chapter 7 The Frequency Element: Using The Equalizer Even though an engineer has every intention of making his recording sound as big and as clear as possible during tracking and overdubs, it often happens that the frequency range of some (or even all) of the tracks are somewhat limited when it comes time to mix. This can be due to the tracks being recorded in a different studio where different monitors or signal path was used, the sound of the instruments themselves, or the taste of the artist or producer. When it comes to the mix, it’s up to the mixing engineer to extend the frequency range of those tracks if it’s appropriate. In the quest to make things sound bigger, fatter, brighter, and clearer, the equalizer is the chief tool used by most mixers, but perhaps more than any other audio tool, it’s how it’s used that separates the average engineer from the master. “I tend to like things to sound sort of natural, but I don’t care what it takes to make it sound like that. Some people get a very preconceived set of notions that you can’t do this or you can’t do that, but as Bruce Swedien said to me, he doesn’t care if you have to turn the knob around backwards; if it sounds good, it is good. Assuming that you have a reference point that you can trust, of course.” —Allen Sides “I find that the more that I mix, the less I actually EQ, but I’m not afraid to bring up a Pultec and whack it up to +10 if something needs it.” —Joe Chiccarelli The Goals Of Equalization While we may not think about it when we’re doing it, there are three primary goals when equalizing: To make an instrument sound clearer and more defined. -

TA-1VP Vocal Processor
D01141720C TA-1VP Vocal Processor OWNER'S MANUAL IMPORTANT SAFETY PRECAUTIONS ªª For European Customers CE Marking Information a) Applicable electromagnetic environment: E4 b) Peak inrush current: 5 A CAUTION: TO REDUCE THE RISK OF ELECTRIC SHOCK, DO NOT REMOVE COVER (OR BACK). NO USER- Disposal of electrical and electronic equipment SERVICEABLE PARTS INSIDE. REFER SERVICING TO (a) All electrical and electronic equipment should be QUALIFIED SERVICE PERSONNEL. disposed of separately from the municipal waste stream via collection facilities designated by the government or local authorities. The lightning flash with arrowhead symbol, within equilateral triangle, is intended to (b) By disposing of electrical and electronic equipment alert the user to the presence of uninsulated correctly, you will help save valuable resources and “dangerous voltage” within the product’s prevent any potential negative effects on human enclosure that may be of sufficient health and the environment. magnitude to constitute a risk of electric (c) Improper disposal of waste electrical and electronic shock to persons. equipment can have serious effects on the The exclamation point within an equilateral environment and human health because of the triangle is intended to alert the user to presence of hazardous substances in the equipment. the presence of important operating and (d) The Waste Electrical and Electronic Equipment (WEEE) maintenance (servicing) instructions in the literature accompanying the appliance. symbol, which shows a wheeled bin that has been crossed out, indicates that electrical and electronic equipment must be collected and disposed of WARNING: TO PREVENT FIRE OR SHOCK separately from household waste. HAZARD, DO NOT EXPOSE THIS APPLIANCE TO RAIN OR MOISTURE. -

Chapter 186 NOISE
Chapter 186 NOISE §186-1. Loud and unnecessary noise §186-3. Permits for amplifying devices. prohibited. §186-4. Stationary noise limits; maximum §186-2. Loud and unnecessary noises permissible sound levels. enumerated. §186-5. Violations and penalties. [HISTORY: Adopted by the Village Board of the Village of Albany 5-11-1992 as Sec. 11-2- 7 of the 1992 Code. Amendments noted where applicable.] GENERAL REFERENCES Disorderly conduct -- See Ch. 110. Parks and navigable waters -- See Ch. 198, §198-1B(2). Peace and good order -- See Ch. 202. §186-1. Loud and unnecessary noise prohibited. It shall be unlawful for any person to make, continue or cause to be made or continued any loud and unnecessary noise. It shall be unlawful for any person knowingly or wantonly to use or operate, or to cause to be used or operated, any mechanical device, machine, apparatus or instrument for intensification or amplification of the human voice or any sound or noise in any public or private place in such manner that the peace and good order of the neighborhood is disturbed or that persons owning, using or occupying property in the neighborhood are disturbed or annoyed. §186-2. Loud and unnecessary noises enumerated. The following acts are declared to be loud, disturbing and unnecessary noises in violation of this chapter, but this enumeration shall not be deemed to be exclusive: A. Horns; signaling devices. The sounding of any horn or signaling device on any automobile, motorcycle or other vehicle on any street or public place in the village for longer than three seconds in any period of one minute or less, except as a danger warning; the creation of any unreasonable loud or harsh sound by means of any signaling device and the sounding of any plainly audible device for an unreasonable period of time; the use of any signaling device except one operated by hand or electricity; the use of any horn, whistle or other device operated by engine exhaust and the use of any signaling device when traffic is for any reason held up. -
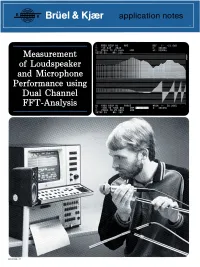
Application Notes
Measurement of Loudspeaker and Microphone Performance using Dual Channel FFT-Analysis by Henrik Biering M.Sc, Briiel&Kjcer Introduction In general, the components of an audio system have well-defined — mostly electrical — inputs and out puts. This is a great advantage when it comes to objective measurements of the performance of such devices. Loudspeakers and microphones, how ever, being electro-acoustic transduc ers, are the major exceptions to the rule and present us with two impor tant problems to be considered before meaningful evaluation of these devices is possible. Firstly, since measuring instru ments are based on the processing of electrical signals, any measurement of acoustical performance involves the Fig. 1. General set-up for loudspeaker measurements. The Digital Cassette Recorder Type use of both a transmitter and a receiv- 7400 is used for storage of the measurement set-ups in addition to storage of the If we intend to measure the re- measured data. Graphics Recorder Type 2313 is used for reformatting data and for ., „ J, ,, „ plotting results sponse of one of these, the response ol the other must have a "flat" frequency response, or at least one that is known in advance. Secondly, neither the output of a loudspeaker nor the input to a micro phone are well-defined under practical circumstances where the interaction between the transducer and the room cannot be neglected if meaningful re sults — i.e. results correlating with subjective evaluations — are to be ob tained. See Fig. 2. For this reason a single specific measurement type for the character ization of a transducer cannot be de- r.- n T ,-,,-,■ -. -

Driverack 260 Owner's Manual-English
DriveRack® Complete Equalization & Loudspeaker Management System 260 Featuring Custom Tunings User Manual ® Table of Contents DriveRack TABLE OF CONTENTS Introduction 4.9 Compressor/Limiter .........................................................33 0.1 Defining the DriveRack 260 System .................................1 4.10 Alignment Delay ............................................................36 0.2 Service Contact Info ..........................................................2 4.11 Input Routing (IN) .........................................................36 0.3 Warranty .............................................................................3 4.12 Output ............................................................................37 Section 1 – Getting Started Section 5 – Utilities/Meters 1.1 Rear Panel Connections ....................................................4 5.1 LCD Contrast/Auto EQ Plot ............................................38 1.2 Front Panel .........................................................................5 5.2 PUP Program/Mute ..........................................................38 1.3 Quick Start .........................................................................6 5.3 ZC Setup ..........................................................................39 5.4 Security .............................................................................41 Section 2 – Editing Functions 5.5 Program List/Program Change ........................................43 5.6 Meters ...............................................................................44 -

Block Diagram of PA System
PHY_366 (A) - TECHNICAL ELECTRONICS- II UNIT 2 – PUBLIC ADDRESS SYSTEM Dr. Uday Jagtap Dept of Physics, Dhanaji Nana Mahavidyalaya, Faizpur. Contents: . Block diagram of P.A. system and its explanation, requirements of P A system, typical P.A. Installation planning (Auditorium having large capacity, college sports), Volume control, Tone control and Mixer system, . Concept of Hi-Fi system, Monophony, Stereophony, Quadra phony, Dolby-A and Dolby-B system, . CD- Player: Block diagram of CD player and function of each block. 29/01/2019, USJ Block diagram of P.A. system: 29/01/2019 Basic Requirements of PA System: . Acoustic feed back: The sound from the loudspeakers should not reach microphone. It may result in loud howling sound. Distribution of Sound Intensity: Instead of installing one or two powerful loudspeakers near the stage alone, audio power should be divided between several loudspeakers to spread it right up to the farthest point. This covers every specified area. Reverberation (Echo): Install several small power loudspeakers at various points to get rid of problem of overlapping of sound waves in the auditorium, rather than using single power high power unit. 29/01/2019, USJ Basic Requirements of PA System: . Orientation of speakers: The loudspeakers be oriented as to direct the sound towards the audience and not towards walls. The loudspeakers should preferably be placed a meter off the floor, so that their axes are about the height of the ears of the listeners. Selection of Microphone: Microphone for PA system should be preferably cardiod type, it will prevent reflection of sound from loudspeakers. For dramas use directive microphone. -

Using the BHM Binaural Head Microphone
Application Note – 11/17 BHM Using the BHM binaural head microphone Introduction 1 Recording with a binaural head microphone 2 Equalization of a BHM recording 2 Individual equalization curves 5 Using the equalization curves 5 Post-processing in ArtemiS SUITE 6 Playback of a BHM recording 7 Application example: BHM recording in a vehicle 7 Introduction HEAD acoustics offers a range of binaural audio sensors for recording sound events in different environments in a way that allows aurally accurate playback. This means that the recordings are made in a way that ensures that they – when played back with the correct playback equalization – give a listener the same impression as if he were present in the original sound field. These binaural sensors include, for example, the artificial head HMS (HEAD Measurement System) and the Binaural Head Microphone (BHM). The BHM allows binaural recordings to be made in places where an artificial head measurement system cannot be used. This is the case, for example, with recordings to be made on the driver’s seat in a moving vehicle. Here it is impossible to use an artificial head measurement system. Instead, a binaural head microphone can be worn by the driver, which measures the sound directly at the entrance of the driver’s ear canals (see figure1). Figure 1: Using the BHM │1│ HEAD acoustics Application Note BHM Recording with a binaural head microphone A frequent application for a binaural head microphone is recording in a vehicle. In order to obtain reproducible results, the following must be observed when making recordings with the BHM: Particularly in a complex acoustic environment as is a vehicle cabin, the positioning of the microphones has a significant influence on the recording. -
Loudspeaker Parameters
Loudspeaker Parameters D. G. Meyer School of Electrical & Computer Engineering Outline • Review of How Loudspeakers Work • Small Signal Loudspeaker Parameters • Effect of Loudspeaker Cable • Sample Loudspeaker • Electrical Power Needed • Sealed Box Design Example How Loudspeakers Work How Loudspeakers Are Made Fundamental Small Signal Mechanical Parameters 2 • Sd – projected area of driver diaphragm (m ) • Mms – mass of diaphragm (kg) • Cms – compliance of driver’s suspension (m/N) • Rms – mechanical resistance of driver’s suspension (N•s/m) • Le – voice coil inductance (mH) • Re – DC resistance of voice coil ( Ω) • Bl – product of magnetic field strength in voice coil gap and length of wire in magnetic field (T•m) Small Signal Parameters These values can be determined by measuring the input impedance of the driver, near the resonance frequency, at small input levels for which the mechanical behavior of the driver is effectively linear. • Fs – (free air) resonance frequency of driver (Hz) – frequency at which the combination of the energy stored in the moving mass and suspension compliance is maximum, which results in maximum cone velocity – usually it is less efficient to produce output frequencies below F s – input signals significantly below F s can result in large excursions – typical factory tolerance for F s spec is ±15% Measurement of Loudspeaker Free-Air Resonance Small Signal Parameters These values can be determined by measuring the input impedance of the driver, near the resonance frequency, at small input levels for which the -
Introduction to Music Technology
PUBLIC SCHOOLS OF EDISON TOWNSHIP DIVISION OF CURRICULUM AND INSTRUCTION INTRODUCTION TO MUSIC TECHNOLOGY Length of Course: Semester (Full Year) Elective / Required: Elective Schools: High Schools Student Eligibility: Grade 9-12 Credit Value: 5 credits Date Approved: September 24, 2012 Introduction to Music Technology TABLE OF CONTENTS Statement of Purpose ----------------------------------------------------------------------------------- 3 Introduction ------------------------------------------------------------------------------------------------- 4 Course Objectives ---------------------------------------------------------------------------------------- 6 Unit 1: Introduction to Music Technology Course and Lab ------------------------------------9 Unit 2: Legal and Ethical Issues In Digital Music -----------------------------------------------11 Unit 3: Basic Projects: Mash-ups and Podcasts ------------------------------------------------13 Unit 4: The Science of Sound & Sound Transmission ----------------------------------------14 Unit 5: Sound Reproduction – From Edison to MP3 ------------------------------------------16 Unit 6: Electronic Composition – Tools For The Musician -----------------------------------18 Unit 7: Pro Tools ---------------------------------------------------------------------------------------20 Unit 8: Matching Sight to Sound: Video & Film -------------------------------------------------22 APPENDICES A Performance Assessments B Course Texts and Supplemental Materials C Technology/Website References D Arts -

7Tara, C. 2.É.- HIS at TORNEY 3,167,314 United States Patent Office Patiented Jan
Jan. 26, 1965 A. R. BENTSEN 3,167,314 PORTABLE PHONOGRAPH Filed June 1, 1962 . ce.. --. AY NVENT OR: ARTHUR R. BENTSEN, BY 7tara, c. 2.É.- HIS AT TORNEY 3,167,314 United States Patent Office Patiented Jan. 26, 1965 warrammaar. E. 2 3, 67,334 the generally downward tilting movement of the record PCERTARE PGNC GRAPH player from its vertical to its horizontal position, the hori ArtEZ2 R. Begise, Liverpool, N.Y., assigng" to General Zontal axis for pivotal movement of the record player 4 Eiegfric Coalpany, a corporation of New Yerk is also located, as shown in F.G. 5, in the lower half of Fied site , 962, Ser. No. 99,343 5 the case ii. When the record player 4 is in its hori 7 Caians. (C. 274-2) Zontal position (as shown in FIG. 5), a substantial por tion thereof is, therefore, located within opening 15 of This invention relates to phonographs, and particularly the case 13. Suitable stop members, not shown, may be to portable stereo phonographs. provided for the horizontal positioning of the base 13, Various arrangements have been devised for portable O or a lip ia at the lower part of the front of the cabinet stereo phonographs, and generally are concerned with it may function as a stop for proper horizontal position ways of attaching and using a pair of stereo loudspeakers. ing of the base 5. In some of these arrangements the loudspeakers are lo A record player mechanism 26, shown in the drawing cated in small cabinets intended to be separated and spaced as being of a record changing type, is carried by the base from the phonograph when in use.