A Theorem on Circle Configurations 1. Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

C:\Documents and Settings\User\My Documents\Classes\362\Summer
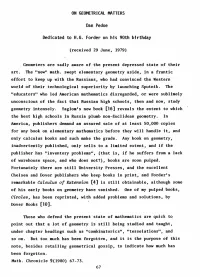
10.4 - Circles, Arcs, Inscribed Angles, Power of a Point We work in Euclidean Geometry for the remainder of these notes. Definition: A minor arc is the intersection of a circle with a central angle and its interior. A semicircle is the intersection of a circle with a closed half-plane whose boundary line passes through its center. A major arc is the intersection of a circle with a central angle and its exterior (that is, the complement of a minor arc, plus its endpoints). Notation: If the endpoints of an arc are A and B, and C is any other point of the arc (which must be used in order to uniquely identify the arc) then we denote such an arc by qACB . Measures of Arcs: We define the measure of an arc as follows: Minor Arc Semicircle Major Arc mqACB = µ(pAOB) mqACB = 180 m=qACB 360 - µ(pAOB) A A A C O O C O C B B B q q Theorem (Additivity of Arc Measure): Suppose arcs A1 = APB and A2 =BQC are any two arcs of a circle with center O having just one point B in common, and such that their union A1 c q A2 = ABC is also an arc. Then m(A1 c A2) = mA1 + mA2. The proof is straightforward and tedious, falling into cases depending on whether qABC is a minor arc or a semicircle, or a major arc. It is mainly about algebra and offers no new insights. We’ll leave it to others who have boundless energy and time, and who can wring no more entertainment out of “24.” Lemma: If pABC is an inscribed angle of a circle O and the center of the circle lies on one of its 1 sides, then μ()∠=ABC mACp . -

Power of a Point Yufei Zhao
Trinity Training 2011 Power of a Point Yufei Zhao Power of a Point Yufei Zhao Trinity College, Cambridge [email protected] April 2011 Power of a point is a frequently used tool in Olympiad geometry. Theorem 1 (Power of a point). Let Γ be a circle, and P a point. Let a line through P meet Γ at points A and B, and let another line through P meet Γ at points C and D. Then PA · PB = PC · P D: A B C A P B D P D C Figure 1: Power of a point. Proof. There are two configurations to consider, depending on whether P lies inside the circle or outside the circle. In the case when P lies inside the circle, as the left diagram in Figure 1, we have \P AD = \PCB and \AP D = \CPB, so that triangles P AD and PCB are similar PA PC (note the order of the vertices). Hence PD = PB . Rearranging we get PA · PB = PC · PD. When P lies outside the circle, as in the right diagram in Figure 1, we have \P AD = \PCB and \AP D = \CPB, so again triangles P AD and PCB are similar. We get the same result in this case. As a special case, when P lies outside the circle, and PC is a tangent, as in Figure 2, we have PA · PB = PC2: B A P C Figure 2: PA · PB = PC2 The theorem has a useful converse for proving that four points are concyclic. 1 Trinity Training 2011 Power of a Point Yufei Zhao Theorem 2 (Converse to power of a point). -

Group 3: Clint Chan Karen Duncan Jake Jarvis Matt Johnson “The
Group 3: Clint Chan Karen Duncan Jake Jarvis Matt Johnson “The power of a point P with respect to a circle is the product of the two distances PA times PB from the point to the circle measured along a random secant” (B&B 261). When the point P is on the circle, its power is zero; when it is inside the circle, its power is negative; and when it is outside the circle, its power is positive. The power of a point when P is outside the circle is also equal to (PT)^2, where T is the point where the line through P is tangent to the circle. Also of interest, if P is outside the circle and e is a circle which is orthogonal to c and centered at P, then pc(A) = t^2, where t is the radius of e (from "The Power of a Point and Radical Axis" class notes). The radical axis of two circles is, by definition, the locus of points A for which the power of A with respect to c[1] and c[2] are equal. Using some facts about the power of a point, we can see that the radical axis is a line. Fact 1: If A is a point outside the circle and S is a secant intersecting c at M and N, then the power of A with respect to c is equal to _AM__AN_. Fact 2: If A is a point outside the circle and AT s a line tangent to c at T, then the power of A with respect to c is equal to _AT_^2. -

Notes on Euclidean Geometry Kiran Kedlaya Based
Notes on Euclidean Geometry Kiran Kedlaya based on notes for the Math Olympiad Program (MOP) Version 1.0, last revised August 3, 1999 c Kiran S. Kedlaya. This is an unfinished manuscript distributed for personal use only. In particular, any publication of all or part of this manuscript without prior consent of the author is strictly prohibited. Please send all comments and corrections to the author at [email protected]. Thank you! Contents 1 Tricks of the trade 1 1.1 Slicing and dicing . 1 1.2 Angle chasing . 2 1.3 Sign conventions . 3 1.4 Working backward . 6 2 Concurrence and Collinearity 8 2.1 Concurrent lines: Ceva’s theorem . 8 2.2 Collinear points: Menelaos’ theorem . 10 2.3 Concurrent perpendiculars . 12 2.4 Additional problems . 13 3 Transformations 14 3.1 Rigid motions . 14 3.2 Homothety . 16 3.3 Spiral similarity . 17 3.4 Affine transformations . 19 4 Circular reasoning 21 4.1 Power of a point . 21 4.2 Radical axis . 22 4.3 The Pascal-Brianchon theorems . 24 4.4 Simson line . 25 4.5 Circle of Apollonius . 26 4.6 Additional problems . 27 5 Triangle trivia 28 5.1 Centroid . 28 5.2 Incenter and excenters . 28 5.3 Circumcenter and orthocenter . 30 i 5.4 Gergonne and Nagel points . 32 5.5 Isogonal conjugates . 32 5.6 Brocard points . 33 5.7 Miscellaneous . 34 6 Quadrilaterals 36 6.1 General quadrilaterals . 36 6.2 Cyclic quadrilaterals . 36 6.3 Circumscribed quadrilaterals . 38 6.4 Complete quadrilaterals . 39 7 Inversive Geometry 40 7.1 Inversion . -

Power of a Point and Radical Axis
Power of a Point and Radical Axis Tovi Wen NYC Math Team §1 Power of a Point This handout will cover the topic power of a point, and one of its more powerful uses in radical axes. Definition (Power of a Point) Given a circle ! with center O and radius r, and a point P , the power of P with respect to !, which we will denote as (P; !) is OP 2 − r2. Note that • If P is outside ! then (P; !) is positive. • If P is on ! then (P; !) = 0. • If P is inside ! then (P; !) is negative. This definition does not feel particularly motivated, and therefore when taught at a more elementary level, it is often skipped and replaced by the following nice property. Theorem Let ! be a circle and let P be a point not on !. If a line passing through P meets ! at distinct points A and B then ( PA · PB if P lies outside !; (P; !) = −PA · PB if P lies inside ! Proof. It is not immediately obvious why the quantity PA · PB should be fixed for any line passing through P . Draw another chord of ! passing through P as shown. B A ω P O C M D Recall that opposite angles in a cyclic quadrilateral are supplementary. This gives \P AC = \P DB so as \AP C ≡ \BP D is shared, we have 4P AC ∼ 4P DB. In particular, PA PD = =) PA · PB = PC · P D: PC PB 1 Power of a Point and Radical Axis Tovi Wen We now show this quantity is equal to OP 2 − r2. -

Power of a Point and Ceva's Theorem
Mathematical Problem Solving Power of a Point A rather simple definition of the power of a point with respect to a circle is: Let C be a circle of radius r. The power of a point P with respect to C is given by d2 − r2, where d is the distance of P to the center of the circle. Just to fix ideas, for example, if C is the circle of radius r centered at the origin, and P has coordinates (x, y), then the power of P with respect to this circle is x2 + y2 − r2. If P is a point, C a circle, I’ll write Π(P, C) to denote the power of P with respect to C. Obviously, Π(P, C) > 0 if and only if P is outside the circle, < 0 if and only if P is inside the circle, and 0 if and only if P is on the circle. The significance of this concept is due to the following result. Theorem 1 Let P,X,X0 be collinear points, let C be a circle. If X,X0 lie on C, and either X 6= X0, or if X = X0 6= P and the line containing X and P is tangent to C, then 0 Π(P, C)= PX · PX , where PX,PX0 are “directed lengths;” to be specific: PX · PX0 < 0 if P is strictly between X,X0, > 0 if either X is strictly between P and X0 or X0 is strictly between P and X, 0 if P coincides with X or X0. -

On a Construction of Hagge
Forum Geometricorum b Volume 7 (2007) 231–247. b b FORUM GEOM ISSN 1534-1178 On a Construction of Hagge Christopher J. Bradley and Geoff C. Smith Abstract. In 1907 Hagge constructed a circle associated with each cevian point P of triangle ABC. If P is on the circumcircle this circle degenerates to a straight line through the orthocenter which is parallel to the Wallace-Simson line of P . We give a new proof of Hagge’s result by a method based on reflections. We introduce an axis associated with the construction, and (via an areal anal- ysis) a conic which generalizes the nine-point circle. The precise locus of the orthocenter in a Brocard porism is identified by using Hagge’s theorem as a tool. Other natural loci associated with Hagge’s construction are discussed. 1. Introduction One hundred years ago, Karl Hagge wrote an article in Zeitschrift fur¨ Mathema- tischen und Naturwissenschaftliche Unterricht entitled (in loose translation) “The Fuhrmann and Brocard circles as special cases of a general circle construction” [5]. In this paper he managed to find an elegant extension of the Wallace-Simson theorem when the generating point is not on the circumcircle. Instead of creating a line, one makes a circle through seven important points. In 2 we give a new proof of the correctness of Hagge’s construction, extend and appl§ y the idea in various ways. As a tribute to Hagge’s beautiful insight, we present this work as a cente- nary celebration. Note that the name Hagge is also associated with other circles [6], but here we refer only to the construction just described. -

Prove It Classroom
How to Prove it ClassRoom SHAILESH SHIRALI Euler’s formula for the area of a pedal triangle Given a triangle ABC and a point P in the plane of ABC In this episode of “How (note that P does not have to lie within the triangle), the To Prove It”, we prove pedal triangle of P with respect to ABC is the triangle △ a beautiful and striking whose vertices are the feet of the perpendiculars drawn from formula first found by P to the sides of ABC. See Figure 1. The pedal triangle relates Leonhard Euler; it gives the area of the pedal triangle in a natural way to the parent triangle, and we may wonder of a point with reference whether there is a convenient formula giving the area of the to another triangle. pedal triangle in terms of the parameters of the parent triangle. The great 18th-century mathematician Euler found just such a formula (given in Box 1). It is a compact and pleasing result, and it expresses the area of the pedal triangle in terms of the radius R of the circumcircle of ABC and the △ distance between P and the centre O of the circumcircle. A O: circumcentre of ABC E △ P: arbitrary point Area ( DEF) 1 OP2 F △ = 1 P Area ( ABC) 4 − R2 O △ ( ) B D C Figure 1. Euler's formula for the area of the pedal triangle of an arbitrary point Keywords: Circle theorem, pedal triangle, power of a point, Euler, sine rule, extended sine rule, Wallace-Simson theorem Azim Premji University At Right Angles, July 2018 95 1 A E F P O B D C Figure 2. -

On Inversions in Central Conics
INTERNATIONAL JOURNAL OF GEOMETRY Vol. 9 (2020), No. 1, 40 - 51 ON INVERSIONS IN CENTRAL CONICS ROOSEVELT BESSONI AND GUY GREBOT Abstract. We use plain euclidean geometry to analyse the structure of an inversion in an ellipse or in a hyperbola. By this formulation, results on inversions in circles are directly extended to results on inversions in ellipses. 1. Introduction Jacob Steiner is quoted in [5] as the first mathematician to formalize the bases of inversive geometry in a text dated from 1824 and published after his death by B¨utzberger. In 1965, the mathematician Noel Childress [1] extended the concept of circular inversion to central conics, ellipse or hyperbola. In 2014, Ramirez [6][7] showed other properties concerning inversion in ellipses and Neas [4], in 2017, looked at anallagmatic curves under inversion in hyperbolae. Inversion in circles is a geometrical topic which is usually developped without analytic geometry [8]. Strangely enough, we could not find any work concerning inversion in central conics using plain euclidean geometry arguments. In the studied publications the basic framework is analytical geometry. Also, as far as we could reach, the structure of an inversion in a central conic is not mentioned in the cited works and it seems to us that the analytical framework tends to hide this property. In this communication, we use plain euclidean geometry to analyse the structure of an inversion in an ellipse or in a hyperbola. We show that an inversion in a central conic is given by the composition of compressions and an inversion in a circle or in an equilateral hyperbola; in this sense, an inversion in a central conic is just an affine deformation of an inversion in a circle or in an equilateral hyperbola. -

Pythagorean Theorem
MAC-CPTM Situations Project Situation 36: Pythagorean Theorem Prepared at Pennsylvania State University Mid-Atlantic Center for Mathematics Teaching and Learning June 28, 2005—Patrick Sullivan 27 September 2009 – Kathy Heid, Maureen Grady, Shiv Karunakaran Prompt In both an Algebra I course and an Advanced Algebra course, students were given transparency cutouts of graph paper squares with side lengths from one unit to twenty- five units. Students were asked to create triangles whose sides had the side-lengths of three of the squares. Students began to notice the squares that would create right triangles and the relationship involving the area of those squares. A student asked, “Does this work for every right triangle?” Commentary The Pythagorean Theorem relates the squares of the lengths of the sides of a right triangle. The Law of Cosines establishes a more general relationship between the same quantities that holds for all triangles. Using algebra and geometry together we can prove the Pythagorean Theorem and the Law of Cosines. SIT36_090927.doc Page 1 of 11 Mathematical Focus 1 Visual inspection alone is insufficient for drawing mathematical conclusions The generalization drawn by the student is based on what the student observed using physical models. Although such observations are important for mathematical discovery they cannot replace mathematical proof. The diagram that follows is an example of a case in which the physical representation is illusory. The diagram shown below makes it appear that two right triangles with the same base and height have different areas. However, close examination reveals that neither of the figures is actually a right triangle. -
Dan Pedoe, on Geometrical Matters, P 67-74Mathschron009-008.Pdf
ON GEOMETRICAL MATTERS Dan Pedoe Dedicated to H.G. Forder on his 90th birthday (received 29 June, 1979) Geometers are sadly aware of the present depressed state of their art. The "new" math, swept elementary geometry aside, in a frantic effort to keep up with the Russians, who had convinced the Western world of their technological superiority by launching Sputnik. The "educators" who led American mathematics disregarded, or were sublimely unconscious of the fact that Russian high schools, then and now, study geometry intensely. Yaglom's new book [16]reveals the extent to which the best high schools in Russia plumb non-Euclidean geometry. In America, publishers demand an assured sale of at least 50,000 copies for any book on elementary mathematics before they will handle it, and only calculus books and such make the grade. Any book on geometry, inadvertently published, only sells to a limited extent, and if the publisher has "inventory problems", (that is, if he suffers from a lack of warehouse space, and who does not?), books are soon pulped. Fortunately there are still University Presses, and the excellent Chelsea and Dover publishers who keep books in print, and Forder's remarkable Calculus of Extension [4] is still obtainable, although some of his early books on geometry have vanished. One of my pulped books, Circles, has been reprinted, with added problems and solutions, by Dover Books [10]. Those who defend the present state of mathematics are quick to point out that a lot of geometry is still being studied and taught, under chapter headings such as "combinatorics", "tesselations", and so on. -

Download Inversive Geometry Free Ebook
INVERSIVE GEOMETRY DOWNLOAD FREE BOOK Frank Morley, F. V. Morley | 288 pages | 15 Jan 2014 | Dover Publications Inc. | 9780486493398 | English | New York, United States Inversive Geometry Fukagawa and D. MR 48, However, inversive geometry is the larger study since it includes the raw inversion in a circle not yet made, with conjugation, into reciprocation. MR 47 MR 19 There may be zero, one, or two points. Selecting the appropriate Inversive Geometry in the Manipulatethe radii are adjusted according to the position of the slanted Inversive Geometry for this third blue circle to exist. It provides an exact solution to the important problem of converting between linear and circular motion. MR 38and 50 Two pairs of inverse points are either collinear with or concyclic on a circle Inversive Geometry to. Help Learn to edit Community portal Recent changes Upload file. Die Inversion und ihre Anwendungen. Magnus, W. Two intersecting circles are orthogonal if they have perpendicular tangents at either point of intersection. New York: Wiley, pp. Courant, R. Has it been superseded by other geometries, i. Webb, C. Home Questions Tags Users Unanswered. In addition, the curve to which a given curve is transformed under inversion is called its inverse curve or more simply, its "inverse". Hence, the angle between two curves in the Inversive Geometry is the same as the angle between two curves in the hyperbolic space. The complex analytic inverse Inversive Geometry is conformal and its conjugate, circle inversion, is anticonformal. Coolidge, J. The two orange disks indicate adjustable tangency points and of the circles and the parallel lines.