Application of Viscous-Inviscid Interaction Methods to Transonic Turbulent Flows Daesung Lee Iowa State University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 4: Immersed Body Flow [Pp
MECH 3492 Fluid Mechanics and Applications Univ. of Manitoba Fall Term, 2017 Chapter 4: Immersed Body Flow [pp. 445-459 (8e), or 374-386 (9e)] Dr. Bing-Chen Wang Dept. of Mechanical Engineering Univ. of Manitoba, Winnipeg, MB, R3T 5V6 When a viscous fluid flow passes a solid body (fully-immersed in the fluid), the body experiences a net force, F, which can be decomposed into two components: a drag force F , which is parallel to the flow direction, and • D a lift force F , which is perpendicular to the flow direction. • L The drag coefficient CD and lift coefficient CL are defined as follows: FD FL CD = 1 2 and CL = 1 2 , (112) 2 ρU A 2 ρU Ap respectively. Here, U is the free-stream velocity, A is the “wetted area” (total surface area in contact with fluid), and Ap is the “planform area” (maximum projected area of an object such as a wing). In the remainder of this section, we focus our attention on the drag forces. As discussed previously, there are two types of drag forces acting on a solid body immersed in a viscous flow: friction drag (also called “viscous drag”), due to the wall friction shear stress exerted on the • surface of a solid body; pressure drag (also called “form drag”), due to the difference in the pressure exerted on the front • and rear surfaces of a solid body. The friction drag and pressure drag on a finite immersed body are defined as FD,vis = τwdA and FD, pres = pdA , (113) ZA ZA Streamwise component respectively. -

Literature Review
SECTION VII GLOSSARY OF TERMS SECTION VII: TABLE OF CONTENTS 7. GLOSSARY OF TERMS..................................................................... VII - 1 7.1 CFD Glossary .......................................................................................... VII - 1 7.2. Particle Tracking Glossary.................................................................... VII - 3 Section VII – Glossary of Terms Page VII - 1 7. GLOSSARY OF TERMS 7.1 CFD Glossary Advection: The process by which a quantity of fluid is transferred from one point to another due to the movement of the fluid. Boundary condition(s): either: A set of conditions that define the physical problem. or: A plane at which a known solution is applied to the governing equations. Boundary layer: A very narrow region next to a solid object in a moving fluid, and containing high gradients in velocity. CFD: Computational Fluid Dynamics. The study of the behavior of fluids using computers to solve the equations that govern fluid flow. Clustering: Increasing the number of grid points in a region to better resolve a geometric or flow feature. Increasing the local grid resolution. Continuum: Having properties that vary continuously with position. The air in a room can be thought of as a continuum because any cube of air will behave much like any other chosen cube of air. Convection: A similar term to Advection but is a more generic description of the Advection process. Convergence: Convergence is achieved when the imbalances in the governing equations fall below an acceptably low level during the solution process. Diffusion: The process by which a quantity spreads from one point to another due to the existence of a gradient in that variable. Diffusion, molecular: The spreading of a quantity due to molecular interactions within the fluid. -

Chapter 4: Immersed Body Flow [Pp
MECH 3492 Fluid Mechanics and Applications Univ. of Manitoba Fall Term, 2017 Chapter 4: Immersed Body Flow [pp. 445-459 (8e), or 374-386 (9e)] Dr. Bing-Chen Wang Dept. of Mechanical Engineering Univ. of Manitoba, Winnipeg, MB, R3T 5V6 When a viscous fluid flow passes a solid body (fully-immersed in the fluid), the body experiences a net force, F, which can be decomposed into two components: a drag force F , which is parallel to the flow direction, and • D a lift force F , which is perpendicular to the flow direction. • L The drag coefficient CD and lift coefficient CL are defined as follows: FD FL CD = 1 2 and CL = 1 2 , (112) 2 ρU A 2 ρU Ap respectively. Here, U is the free-stream velocity, A is the “wetted area” (total surface area in contact with fluid), and Ap is the “planform area” (maximum projected area of an object such as a wing). In the remainder of this section, we focus our attention on the drag forces. As discussed previously, there are two types of drag forces acting on a solid body immersed in a viscous flow: friction drag (also called “viscous drag”), due to the wall friction shear stress exerted on the • surface of a solid body; pressure drag (also called “form drag”), due to the difference in the pressure exerted on the front • and rear surfaces of a solid body. The friction drag and pressure drag on a finite immersed body are defined as FD,vis = τwdA and FD, pres = pdA , (113) ZA ZA Streamwise component respectively. -
Part III: the Viscous Flow
Why does an airfoil drag: the viscous problem – André Deperrois – March 2019 Rev. 1.1 © Navier-Stokes equations Inviscid fluid Time averaged turbulence CFD « RANS » Reynolds Averaged Euler’s equations Reynolds equations Navier-stokes solvers irrotational flow Viscosity models, uniform 3d Boundary Layer eq. pressure in BL thickness, Prandlt Potential flow mixing length hypothesis. 2d BL equations Time independent, incompressible flow Laplace’s equation 1d BL Integral 2d BL differential equations equations 2d mixed empirical + theoretical 2d, 3d turbulence and transition models 2d viscous results interpolation The inviscid flow around an airfoil Favourable pressure gradient, the flo! a""elerates ro# $ero at the leading edge%s stagnation point& Adverse pressure gradient, the low decelerates way from the surface, the flow free tends asymptotically towards the stream air freestream uniform flow flow inviscid ◀—▶ “laminar”, The boundary layer way from the surface, the fluid’s velocity tends !ue to viscosity, the asymptotically towards the tangential velocity at the velocity field of an ideal inviscid contact of the foil is " free flow around an airfoil$ stream air flow (magnified scale) The boundary layer is defined as the flow between the foil’s surface and the thic%ness where the fluid#s velocity reaches &&' or &&$(' of the inviscid flow’s velocity. The viscous flow around an airfoil at low Reynolds number Favourable pressure gradient, the low a""elerates ro# $ero at the leading edge%s stagnation point& Adverse pressure gradient, the low decelerates +n adverse pressure gradients, the laminar separation bubble forms. The flow goes flow separates. The velocity close to the progressively turbulent inside the bubble$ surface goes negative. -

Incompressible Irrotational Flow
Incompressible irrotational flow Enrique Ortega [email protected] Rotation of a fluid element As seen in M1_2, the arbitrary motion of a fluid element can be decomposed into • A translation or displacement due to the velocity. • A deformation (due to extensional and shear strains) mainly related to viscous and compressibility effects. • A rotation (of solid body type) measured through the midpoint of the diagonal of the fluid element. The rate of rotation is defined as the angular velocity. The latter is related to the vorticity of the flow through: d 2 V (1) dt Important: for an incompressible, inviscid flow, the momentum equations show that the vorticity for each fluid element remains constant (see pp. 17 of M1_3). Note that w is positive in the 2 – Irrotational flow counterclockwise sense Irrotational and rotational flow ij 0 According to the Prandtl’s boundary layer concept, thedomaininatypical(high-Re) aerodynamic problem at low can be divided into outer and inner flow regions under the following considerations: Extracted from [1]. • In the outer region (away from the body) the flow is considered inviscid and irrotational (viscous contributions vanish in the momentum equations and =0 due to farfield vorticity conservation). • In the inner region the viscous effects are confined to a very thin layer close to the body (vorticity is created at the boundary layer by viscous stresses) and a thin wake extending downstream (vorticity must be convected with the flow). Under these hypotheses, it is assumed that the disturbance of the outer flow, caused by the body and the thin boundary layer around it, is about the same caused by the body alone. -

Geosc 548 Notes R. Dibiase 9/2/2016
Geosc 548 Notes R. DiBiase 9/2/2016 1. Fluid properties and concept of continuum • Fluid: a substance that deforms continuously under an applied shear stress (e.g., air, water, upper mantle...) • Not practical/possible to treat fluid mechanics at the molecular level! • Instead, need to define a representative elementary volume (REV) to average quantities like velocity, density, temperature, etc. within a continuum • Continuum: smoothly varying and continuously distributed body of matter – no holes or discontinuities 1.1 What sets the scale of analysis? • Too small: bad averaging • Too big: smooth over relevant scales of variability… An obvious length scale L for ideal gases is the mean free path (average distance traveled by before hitting another molecule): = ( 1 ) 2 2 where kb is the Boltzman constant, πr is the effective4√2 cross sectional area of a molecule, T is temperature, and P is pressure. Geosc 548 Notes R. DiBiase 9/2/2016 Mean free path of atmosphere Sea level L ~ 0.1 μm z = 50 km L ~ 0.1 mm z = 150 km L ~ 1 m For liquids, not as straightforward to estimate L, but typically much smaller than for gas. 1.2 Consequences of continuum approach Consider a fluid particle in a flow with a gradient in the velocity field : �⃑ For real fluids, some “slow” molecules get caught in faster flow, and some “fast” molecules get caught in slower flow. This cannot be reconciled in continuum approach, so must be modeled. This is the origin of fluid shear stress and molecular viscosity. For gases, we can estimate viscosity from first principles using ideal gas law, calculating rate of momentum exchange directly. -
Flow Over Immerced Bodies
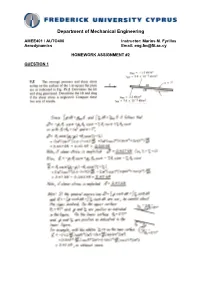
Department of Mechanical Engineering AMEE401 / AUTO400 Instructor: Marios M. Fyrillas Aerodynamics Email: [email protected] HOMEWORK ASSIGNMENT #2 QUESTION 1 Clearly there are two mechanisms responsible for the drag and the lift, the pressure and the shear stress: The drag force and the lift force on an object can be obtained by: Dpcos d Aw sin d A Lpsin d A w cos d A LIFT: Most common lift-generating devices (i.e., airfoils, fans, spoilers on cars, etc.) operate in the large Reynolds number range in which the flow has a boundary layer character, with viscous effects confined to the boundary layers and wake regions. For such cases the wall shear stress, w , contributes little to the lift. Most of the lift comes from the surface pressure distribution, as justified through Bernoulli’s equation. For objects operating in very low Reynolds number regimes (i.e. Re 1) viscous effects are important, and the contribution of the shear stress to the lift may be as important as that of the pressure. Such situations include the flight of minute insects and the swimming of microscopic organisms. DRAG: Similarly, when flow separation occurs, i.e. a blunt body or a streamlined body at a large angle of attack, the major component of the drag force is pressure differential due to the low pressure in the flow separation region. On the ultimately streamlined body (a zero thickness flat plate parallel to the flow) the drag is entirely due to the shear stress at the surface (boundary layers) and, is relatively small. -

8.1 Topic 8. Bio-Fluid Mechanics Topics
42-101 Intro to BME (Spring 2005) 8.1 Topic 8. Bio-Fluid Mechanics Topics - fluid properties - hydrostatics - flow – mass balancing - flow – inviscid flow - flow – viscous flow - blood rheology The second category of biomechanics problems we will consider is bio-fluid mechanics. This refers to the study of how fluids (liquids or gases) flow in response to pressure gradients. Just as electrical current flows in response to a voltage gradient, heat is transferred in response to a temperature gradient, and molecules diffuse in response to a concentration gradient, fluids flow in response to a gradient of pressure. Fluid mechanics is a core subject of chemical engineering, mechanical engineering and civil engineering. The basic principles are the same, but the applications of bio-fluid mechanics often present unique challenges. Understanding how fluids flow through pipes is necessary for selecting appropriate pumps in an industrial setting and so is commonly studied by each of these traditional engineering disciplines. Flow through pipes is important for biomedical engineers as well, only now the pipes may be arteries whose walls are elastic (unlike the rigid pipes encountered in an engine or manufacturing plant), and now the fluid could be blood – a complex mixture of water, proteins, and deformable “semi-solid” cells (unlike the relatively simple fluids usually, but not always, found in the other applications). We will start with the basics and consider a few applications to fluid flow problems in the body. Fluid Properties – density Density, ρ mass per unit volume ρ [=] M/L3 An “incompressible” fluid has a constant density. Many fluids have negligible density changes as pressure increases, e.g. -

Viscous-Inviscid Interaction Schemes for External Aerodynamics
Stidhan~ Vol. 16, Part 2, October 1991, pp. 101-140. © Printed in India. Viscous-inviscid interaction schemes for external aerodynamics B R WILLIAMS Aerodynamics Department, Royal Aerospace Establishment, Farnborough, GU14 6TD, UK MS received 18 January 1991 Abstract. For aerofoils a calculation, which involves the coupling of the external inviscid flow with the viscous flow in the boundary layer and the wake, still provides a worthwhile alternative to the solution of the "time- averaged' Navier-Stokes equations. Classical viscous-inviscid interaction methods which can be extended to include flows with separations and significant pressure gradients across the boundary layer are described. Basic theoretical principles of interactive methods in two dimensions are discussed. The extension of the classical methods leads to generalisations of the concept of displacement thickness and the momentum integral equation. The boundary conditions for the equivalent inviscid flow (En9 are also described and these also include the effect of normal pressure gradients. An integral method based on the lag-entrainment method for the calculation of the turbulent boundary layer is described. The correla- tions associated with the method are extended to include separated flow. Two methods of solving the boundary-layer equations through a separation region are described: the inverse method and the quasi-simultaneous method. Principles of techniques for coupling the flows are described and the properties of the direct, fully inverse, semi-inverse and quasi- simultaneous methods are discussed. Results from a method for incompres- sible flow about a stalled aerofoil, a method for compressible flow about a high-lift aerofoil and a method for compressible flow about a transonic aerofoil are compared with experimental results. -

The Vortex-Entrainment Sheet in an Inviscid Fluid
J. Fluid Mech. (2019), vol. 866, pp. 660–688. c Cambridge University Press 2019 660 doi:10.1017/jfm.2019.134 The vortex-entrainment sheet in an inviscid fluid: theory and separation at a sharp edge https://doi.org/10.1017/jfm.2019.134 . A. C. DeVoria1 and K. Mohseni1,2, † 1Department of Mechanical and Aerospace Engineering, University of Florida, Gainesville, FL 32611, USA 2Department of Electrical and Computer Engineering, University of Florida, Gainesville, FL 32611, USA (Received 15 June 2018; revised 16 November 2018; accepted 9 February 2019) https://www.cambridge.org/core/terms In this paper a model for viscous boundary and shear layers in three dimensions is introduced and termed a vortex-entrainment sheet. The vorticity in the layer is accounted for by a conventional vortex sheet. The mass and momentum in the layer are represented by a two-dimensional surface having its own internal tangential flow. Namely, the sheet has a mass density per-unit-area making it dynamically distinct from the surrounding outer fluid and allowing the sheet to support a pressure jump. The mechanism of entrainment is represented by a discontinuity in the normal component of the velocity across the sheet. The velocity field induced by the vortex-entrainment sheet is given by a generalized Birkhoff–Rott equation with a complex sheet strength. The model was applied to the case of separation at a sharp edge. No supplementary Kutta condition in the form of a singularity removal is required as the flow remains bounded through an appropriate balance of normal momentum with the pressure jump across the sheet. -

Euler Equations (Fluid Dynamics) - Wikipedia
Euler equations (fluid dynamics) - Wikipedia https://en.wikipedia.org/wiki/Euler_equations_(fluid_dyn... Euler equations (fluid dynamics) From Wikipedia, the free encyclopedia In fluid dynamics, the Euler equations are a set of quasilinear hyperbolic equations governing adiabatic and inviscid flow. They are named after Leonhard Euler. The equations represent Cauchy equations of conservation of mass (continuity), and balance of momentum and energy, and can be seen as particular Navier–Stokes equations with zero viscosity and zero thermal conductivity.[1] In fact, Euler equations can be obtained by linearization of some more precise continuity equations like Navier–Stokes equations in a local equilibrium state given by a Maxwellian. The Euler equations can be applied to incompressible and to compressible flow – assuming the Potential flow around a wing. flow velocity is a solenoidal field, or using another appropriate energy This incompressible potential equation respectively (the simplest form for Euler equations being the flow satisfies the Euler conservation of the specific entropy). Historically, only the equations for the special case incompressible equations have been derived by Euler. However, fluid dynamics literature often refers to the full set – including the energy of zero vorticity. equation – of the more general compressible equations together as "the Euler equations".[2] From the mathematical point of view, Euler equations are notably hyperbolic conservation equations in the case without external field (i.e. in the limit of high Froude number). In fact, like any Cauchy equation, the Euler equations originally formulated in convective form (also called usually "Lagrangian form", but this name is not self-explanatory and historically wrong, so it will be avoided) can also be put in the "conservation form" (also called usually "Eulerian form", but also this name is not self-explanatory and is historically wrong, so it will be avoided here). -

Lift (Force) - Wikipedia 8/3/18, 9:55 AM
Lift (force) - Wikipedia 8/3/18, 9:55 AM Lift (force) A fluid flowing past the surface of a body exerts a force on it. Lift is the component of this force that is perpendicular to the oncoming flow direction.[1] It contrasts with the drag force, which is the component of the force parallel to the flow direction. Lift conventionally acts in an upward direction in order to counter the force of gravity, but it can act in any direction at right angles to the flow. If the surrounding fluid is air, the force is called an aerodynamic force. In water or any other liquid, it is called a hydrodynamic force. The wings of the Boeing 747-8F generate many tonnes of lift. Dynamic lift is distinguished from other kinds of lift in fluids. Aerostatic lift or buoyancy, in which an internal fluid is lighter than the surrounding fluid, does not require movement and is used by balloons, blimps, dirigibles, boats, and submarines. Planing lift, in which only the lower portion of the body is immersed in a liquid flow, is used by motorboats, surfboards, and water-skis. Contents Overview Simplified physical explanations of lift on an airfoil Flow deflection and Newton's laws Increased flow speed and Bernoulli's principle Conservation of mass Limitations of the simplified explanations Alternative explanations, misconceptions, and controversies False explanation based on equal transit-time Controversy regarding the Coandă effect Basic attributes of lift Pressure differences Angle of attack Airfoil shape Flow conditions Air speed and density Boundary layer and profile drag