3D-Models of the Human Habitat for the Internet
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rich Internet Applications
Rich Internet Applications (RIAs) A Comparison Between Adobe Flex, JavaFX and Microsoft Silverlight Master of Science Thesis in the Programme Software Engineering and Technology CARL-DAVID GRANBÄCK Department of Computer Science and Engineering CHALMERS UNIVERSITY OF TECHNOLOGY UNIVERSITY OF GOTHENBURG Göteborg, Sweden, October 2009 The Author grants to Chalmers University of Technology and University of Gothenburg the non-exclusive right to publish the Work electronically and in a non-commercial purpose make it accessible on the Internet. The Author warrants that he/she is the author to the Work, and warrants that the Work does not contain text, pictures or other material that violates copyright law. The Author shall, when transferring the rights of the Work to a third party (for example a publisher or a company), acknowledge the third party about this agreement. If the Author has signed a copyright agreement with a third party regarding the Work, the Author warrants hereby that he/she has obtained any necessary permission from this third party to let Chalmers University of Technology and University of Gothenburg store the Work electronically and make it accessible on the Internet. Rich Internet Applications (RIAs) A Comparison Between Adobe Flex, JavaFX and Microsoft Silverlight CARL-DAVID GRANBÄCK © CARL-DAVID GRANBÄCK, October 2009. Examiner: BJÖRN VON SYDOW Department of Computer Science and Engineering Chalmers University of Technology SE-412 96 Göteborg Sweden Telephone + 46 (0)31-772 1000 Department of Computer Science and Engineering Göteborg, Sweden, October 2009 Abstract This Master's thesis report describes and compares the three Rich Internet Application !RIA" frameworks Adobe Flex, JavaFX and Microsoft Silverlight. -
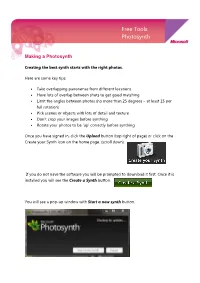
Free Tools Photosynth
Free Tools Photosynth Making a Photosynth Creating the best synth starts with the right photos. Here are some key tips: • Take overlapping panoramas from different locations • Have lots of overlap between shots to get good matching • Limit the angles between photos (no more than 25 degrees – at least 15 per full rotation) • Pick scenes or objects with lots of detail and texture • Don’t crop your images before synthing • Rotate your photos to be ‘up’ correctly before synthing Once you have signed in, click the Upload button (top right of page) or click on the Create your Synth icon on the home page. (scroll down). If you do not have the software you will be prompted to download it first. Once it is installed you will see the Create a Synth button. You will see a pop-up window with Start a new synth button. Give your synth a name, tags (descriptive words) and description. Click Add Photos, browse to your files add them. Then click on the Synth button at the bottom of the page. Photosynth will do the rest for you. Making a Panorama Many photosynths consist of photos shot from a single location. Our friends in Microsoft Research have developed a free, world class panoramic image stitcher called Microsoft Image Composite Editor (ICE for short.) ICE takes a set of overlapping photographs of a scene shot from a single camera location, and creates a single high-resolution image. Photosynth now has support for uploading, exploring and viewing ICE panoramas alongside normal synths. Here’s how to create a panorama in ICE and upload it to Photosynth: 1. -

Microsoft 2012 Citizenship Report
Citizenship at Microsoft Our Company Serving Communities Working Responsibly About this Report Microsoft 2012 Citizenship Report Microsoft 2012 Citizenship Report 01 Contents Citizenship at Microsoft Serving Communities Working Responsibly About this Report 3 Serving communities 14 Creating opportunities for youth 46 Our people 85 Reporting year 4 Working responsibly 15 Empowering youth through 47 Compensation and benefits 85 Scope 4 Citizenship governance education and technology 48 Diversity and inclusion 85 Additional reporting 5 Setting priorities and 16 Inspiring young imaginations 50 Training and development 85 Feedback stakeholder engagement 18 Realizing potential with new skills 51 Health and safety 86 United Nations Global Compact 5 External frameworks 20 Supporting youth-focused 53 Environment 6 FY12 highlights and achievements nonprofits 54 Impact of our operations 23 Empowering nonprofits 58 Technology for the environment 24 Donating software to nonprofits Our Company worldwide 61 Human rights 26 Providing hardware to more people 62 Affirming our commitment 28 Sharing knowledge to build capacity 64 Privacy and data security 8 Our business 28 Solutions in action 65 Online safety 8 Where we are 67 Freedom of expression 8 Engaging our customers 31 Employee giving and partners 32 Helping employees make 69 Responsible sourcing 10 Our products a difference 71 Hardware production 11 Investing in innovation 73 Conflict minerals 36 Humanitarian response 74 Expanding our efforts 37 Providing assistance in times of need 76 Governance 40 Accessibility 77 Corporate governance 41 Empowering people with disabilities 79 Maintaining strong practices and performance 42 Engaging students with special needs 80 Public policy engagement 44 Improving seniors’ well-being 83 Compliance Cover: Participants at the 2012 Imagine Cup, Sydney, Australia. -

Klaus-Peter Zauner, Microsoft Research European Fellow; Ece Kamar, Microsoft Research Ph.D
INNOVATION: PRIMING THE GLOBAL TALENT PIPELINE External Research Division “We want to do everything we can to equip a new generation of technology leaders with the knowledge and tools they need to harness the magic of software to improve lives, solve problems and catalyze economic growth.” —Bill Gates Chairman, Microsoft Corporation Cover photos: Alban Rrustemi, Microsoft Research Ph.D. Scholar; Radhika Nagpal, Microsoft Research New Faculty Fellow; Rodrigo de Oliveira, Microsoft Research Ph.D. Fellow; Klaus-Peter Zauner, Microsoft Research European Fellow; Ece Kamar, Microsoft Research Ph.D. Fellow; Parul Shah, Microsoft Research Ph.D. Fellow 2 Innovation: Priming the Global Talent Pipeline INNOVATION: PRIMING THE GLOBAL TALENT PIPELINE “Our goal at Microsoft Research is to advance the state of the art in technology and through that advancement contribute to the future for society and for our planet. One important way we’re doing that is identifying talented students and early-career university faculty and providing them with tools and opportunities to pursue important discoveries across a range of research and scientific fields.” —Rick Rashid Senior Vice President, Microsoft Research { Contents Microsoft Research Builds Community . 2. Empowering Young Innovators . 4. Profiles Klaus-Peter Zauner, Microsoft Research European Fellow . 7. Parul Shah, Microsoft Research Ph .D . Fellow . 9. Xiao Zhang, Microsoft Research Ph .D . Fellow . 11 Radhika Nagpal, Microsoft Research New Faculty Fellow . 13 Alban Rrustemi, Microsoft Research Ph .D . Scholar . 15 Ece Kamar, Microsoft Research Ph .D . Fellow . 17 Rodrigo de Oliveira, Microsoft Research Ph .D . Fellow . 19 Bijendra Jain, Microsoft Research Community Partner . 21 Ignacio Casas, Microsoft Research Community Partner . -

Q1 What Do You See As the Biggest Opportunity for Kent County?
2018 Comprehensive Plan Survey Q1 What do you see as the biggest opportunity for Kent County? Answered: 496 Skipped: 40 Growth management Retention of a viable... Quality education... Tourism Natural resource... 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% ANSWER CHOICES RESPONSES Growth management 37.10% 184 Retention of a viable agricultural industry 24.19% 120 Quality education facilities - public, private & higher education 16.53% 82 Tourism 11.29% 56 Natural resource management 10.89% 54 TOTAL 496 1 / 60 2018 Comprehensive Plan Survey Q2 What do you consider to be the County's biggest challenge? Answered: 485 Skipped: 51 42.68% 34.43% 8.04% 8.04%6.80% 42.68% 34.43% 8.04% 8.04%6.80% 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% Lack of high paying/high-tech jobs Infrastructure improvements not keeping pace with development Lack of affordable housing Imbalance of residential to commercial/industrial uses Overcrowding of schools ANSWER CHOICES RESPONSES Lack of high paying/high-tech jobs 42.68% 207 Infrastructure improvements not keeping pace with development 34.43% 167 Lack of affordable housing 8.04% 39 Imbalance of residential to commercial/industrial uses 8.04% 39 Overcrowding of schools 6.80% 33 TOTAL 485 2 / 60 2018 Comprehensive Plan Survey Q3 What do you consider the biggest threat to Kent County? Answered: 501 Skipped: 35 Loss of community identityidentity Loss of community identity8.38% (42) Lack of strength Loss of 8.38% (42) Loss of inin County'sCounty's farmland/openfarmland/open spacespace Lackeconomic of strength base Loss -
Documentation of the Body Transformations During the Decomposition Process: from the Crime Scene to the Laboratory
University of Huddersfield Repository Zurgani, Emad. K. A. Documentation of the Body Transformations during the Decomposition Process: From the Crime Scene to the Laboratory Original Citation Zurgani, Emad. K. A. (2018) Documentation of the Body Transformations during the Decomposition Process: From the Crime Scene to the Laboratory. Doctoral thesis, University of Huddersfield. This version is available at http://eprints.hud.ac.uk/id/eprint/34690/ The University Repository is a digital collection of the research output of the University, available on Open Access. Copyright and Moral Rights for the items on this site are retained by the individual author and/or other copyright owners. Users may access full items free of charge; copies of full text items generally can be reproduced, displayed or performed and given to third parties in any format or medium for personal research or study, educational or not-for-profit purposes without prior permission or charge, provided: • The authors, title and full bibliographic details is credited in any copy; • A hyperlink and/or URL is included for the original metadata page; and • The content is not changed in any way. For more information, including our policy and submission procedure, please contact the Repository Team at: [email protected]. http://eprints.hud.ac.uk/ Documentation of the Body Transformations during the Decomposition Process: From the Crime Scene to the Laboratory A Thesis submitted to the University of Huddersfield in partial fulfilment of the requirements for the degree of Doctor of Philosophy Emad. K. A. Zurgani School of Applied Sciences Dec 2017 Copyright statement I. The author of this thesis (including any appendices and/or schedules to this thesis) owns any copyright in it (the “Copyright”) and s/he has given The University of Huddersfield the right to use such copyright for any administrative, promotional, educational and/or teaching purposes. -

Synchronous Gestures in Multi-Display Environments
Synchronous Gestures in Multi-Display Environments Gonzalo Ramos University of Toronto, Live Labs Kenneth Hinckley Microsoft Research Andy Wilson Microsoft Research Raman Sarin Microsoft Research RUNNING HEAD: SYNCH. GESTURES IN DISPLAY ENVIRONMENTS Corresponding Author’s Contact Information: Gonzalo Ramos 136 – 102nd Ave SE, #226 Bellevue, WA, 98004, USA (425)445-3724 [email protected] - 1 - Brief Authors’ Biographies: Gonzalo Ramos received his Honors Bachelors in Computer Science from the University of Buenos Aires where he worked on image compression and wavelets. He later obtained his M.Sc. in Computer Science at the University of Toronto, focusing on numerical analysis and scientific visualization issues. He completed his doctoral studies in Computer Science at the University of Toronto doing research in Human-Computer Interaction. Currently he is a scientist at Microsoft’s Live Labs. Kenneth Hinckley is a research scientist at Microsoft Research. Ken’s research extends the expressiveness and richness of user interfaces by designing novel input technologies and techniques. He attacks his research from a systems perspective, by designing and prototyping advanced functionality, as well as via user studies of novel human-computer interactions and quantitative analysis of user performance in experimental tasks. He holds a Ph.D. in Computer Science from the University of Virginia, where he studied with Randy Pausch. This article is dedicated to Randy’s heroic battle against pancreatic cancer. Andy Wilson is a member of the Adaptive Systems and Interaction group at Microsoft Research. His current areas of interest include applying sensing techniques to enable new styles of human-computer interaction, as well as machine learning, gesture-based interfaces, inertial sensing and display technologies. -
Microsoft and the UN Sustainable Development Goals
Microsoft and the UN Sustainable Development Goals September 2017 Introduction and Context Microsoft’s mission — to empower every person and every organization on the planet to achieve more — aligns strongly with the United Nation’s global agenda for sustainable development from 2015 through 2030. The UN General Assembly articulated that agenda in a set of 17 Sustainable Development Goals (SDGs) seeking to end poverty, protect the planet, and ensure prosperity for all. Each of the United Nation’s goals present challenges bigger than any one organization, or even one sector of society can accomplish alone. At Microsoft, we seek to apply the unique assets that a technology company of our scope and scale has towards the global, multi-sector effort needed to achieve the SDGs. Doing so is both our responsibility and an opportunity to advance societal needs and technology at the same time collaboratively. Microsoft’s commitment to corporate social responsibility requires us to be thoughtful about the impact of our business practices and policies. We believe the way we operate helps contribute to many of the UN SDGs, ranging from our employment practices to our commitments to source renewable energy to the work we do to infuse responsibility across our global supply chain. This white paper focuses on what we feel are our unique contributions: • the application of Microsoft’s products and services to the SDGs, and • our philanthropic and other investments targeted towards fostering the sustainable development of communities around the world. Similarly, while Microsoft’s efforts are helping advance progress towards meeting the broad range of issues covered by all 17 SDGs, we have prioritized 8 SDGs to ensure we leverage our assets for the greatest impact. -

Computer-Based Software Information Sheet
Computer-Based Software Information Sheet Name Curricular Use 7-Zip 7-Zip is an open source file archiver. Adobe Reader View, create, manipulate, print and manage files in PDF Format Audacity This software looks and acts like a tape recorder. Just hit record and talk, sing, play and export to mp3 for a finished product. CamStudio Chemistry Add-in for Word ComicLife Enchanting FET Fonts4Teachers Gimp GIMP is the GNU Image Manipulation Program. It is a freely distributed piece of software for such tasks as photo retouching, image composition and image authoring. Gimp Tutorials Google Earth Google SketchUp Graph HoverCamFlex Image Resizer InfanView iTunes Kodu Game Lab Komposer MDS Calculator Microsoft Mathematics Microsoft Office Mp4Cam2Avi This software is to convert Mp4 video files from a camera to an Avi video file. MuseScore Paint.NET Paint.NET is free image editing and photo manipulation software. It features an intuitive and innovative user interface with support for layers, unlimited undo, special effects, and a wide variety of useful and powerful tools. Paint.NET Tutorials. Photo Story Microsoft Photo Story is a free application that allows users to create a visual story (show and tell presentation) from their digital photos. Photosynth Pivot Stickfigure Animator Pivot makes it easy to create stick-figure animations. You can build your own stick figures and load your own backgrounds. The animations can be saved as animated gifs to be used on web pages. Scratch Songsmith SMART Education Software (Notebook) SMART Ideas StoryBoardPC VirtualDub Windows Movie Maker WinScp Zoomit . -

Automated Generation of Massive Image Knowledge Collections Using
Viangteeravat et al. Journal of Clinical Bioinformatics 2011, 1:18 JOURNAL OF http://www.jclinbioinformatics.com/content/1/1/18 CLINICAL BIOINFORMATICS METHODOLOGY Open Access Automated generation of massive image knowledge collections using Microsoft Live Labs Pivot to promote neuroimaging and translational research Teeradache Viangteeravat, Matthew N Anyanwu*, Venkateswara Ra Nagisetty and Emin Kuscu Abstract Background: Massive datasets comprising high-resolution images, generated in neuro-imaging studies and in clinical imaging research, are increasingly challenging our ability to analyze, share, and filter such images in clinical and basic translational research. Pivot collection exploratory analysis provides each user the ability to fully interact with the massive amounts of visual data to fully facilitate sufficient sorting, flexibility and speed to fluidly access, explore or analyze the massive image data sets of high-resolution images and their associated meta information, such as neuro-imaging databases from the Allen Brain Atlas. It is used in clustering, filtering, data sharing and classifying of the visual data into various deep zoom levels and meta information categories to detect the underlying hidden pattern within the data set that has been used. Method: We deployed prototype Pivot collections using the Linux CentOS running on the Apache web server. We also tested the prototype Pivot collections on other operating systems like Windows (the most common variants) and UNIX, etc. It is demonstrated that the approach yields very good results when compared with other approaches used by some researchers for generation, creation, and clustering of massive image collections such as the coronal and horizontal sections of the mouse brain from the Allen Brain Atlas. -

AD Lab DRAFT
AD Lab DRAFT User Guide | 1 AccessData Legal and Company Information AccessData Legal Information Document date: November 19, 2018 Legal Information ©2018 AccessData Group, Inc. All rights reserved. No part of this publication may be reproduced, photocopied, stored on a retrieval system, or transmitted without the express written consent of the publisher. AccessData Group, Inc. makes no representations or warranties with respect to the contents or use of this documentation, and specifically disclaims any express or implied warranties of merchantability or fitness for any particular purpose. Further, AccessData Group, Inc. reserves the right to revise this publication and to make changes to its content, at any time, without obligation to notify any person or entity of such revisions or changes. Further, AccessData Group, Inc. makes no representations or warranties with respect to any software, and specifically disclaims any express or implied warranties of merchantability or fitness for any particular purpose. Further, AccessData Group, Inc. reserves the right to make changes to any and all parts of AccessData software, at any time, without any obligation to notify any person or entity of such changes. You may not export or re-export this product in violation of any applicable laws or regulations including, without limitation, U.S. export regulations or the laws of the country in which you reside. AccessData Group, Inc. 588 West 400 South Suite 350 Lindon, UT 84042 USA AccessData Trademarks and Copyright Information The following are either registered trademarks or trademarks of AccessData Group, Inc. All other trademarks are the property of their respective owners . AccessData® AD Summation® Mobile Phone Examiner Plus® AccessData Certified Examiner® (ACE®) Discovery Cracker® MPE+ Velocitor™ AD AccessData™ Distributed Network Attack® Password Recovery Toolkit® AD eDiscovery® DNA® PRTK® AD RTK™ Forensic Toolkit® (FTK®) Registry Viewer® LawDrop® Summation® | 2 A trademark symbol (®, ™, etc.) denotes an AccessData Group, Inc. -

Single Snapshot System for the Fast 3D Modeling Using Dynamic Time Warping
SINGLE SNAPSHOT SYSTEM FOR THE FAST 3D MODELING USING DYNAMIC TIME WARPING Luis Ruiz, Xavier Mateo, Ciro Gr`acia and Xavier Binefa Department of Information and Communication Technologies, Universitat Pompeu Fabra, Barcelona, Spain Keywords: 3D Reconstruction, Mesh Zippering, Non-overlapping, Dynamic Time Warping. Abstract: In this work we explore the automatic 3D modeling of a person using images acquired from a range camera. Using only one range camera and two mirrors, the objective is to obtain a full 3D model with one single snapshot. The combination of the camera and the two mirrors give us three non-overlapping meshes, making impossible to use common zippering algorithms based on overlapping meshes. Therefore, Dynamic Time Warping algorithm is used to find the best matching between boundaries of the meshes. Experimental results and error evaluations are given to show the robustness and efficiency of our method. 1 INTRODUCTION aspects needed for the correct understanding of the presented system, which is explained in Section 4. Nowadays we can find on the market low cost range Experimental results of the presented system are ex- cameras which allow the direct retrieval of depth in- plained in Section 5, and finally conclusions and fu- formation from a scene. This depth information can ture work are discussed in Section 6. be used in combination with the visual information from another sensor in order to recreate the observed scene in a 3D environment with high realism. The increasing use of this kind of cameras has attracted 2 STATE OF THE ART interest from different research fields like computer vision, computer graphics, archeology, industrial pro- The 3D modeling of common objects is a long-time totyping, etc.