Electric Motor Handbook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
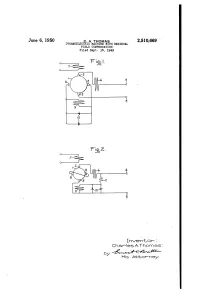
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

Income? Bisone
INCOME? BISONE ED 179 392 SP 029 296 $ AUTHOR Hamilton, Howard B. TITLE Problem Manual for Power Processiug, Tart 1. Electric Machinery Analysis. ) ,INSTITUTION Pittsbutgh Univ., VA. 51'014 AGENCY National Science Foundation, Weeshingtcni D.C. PUB DATE -70 GRANT NSF-GY-4138 NOTE 40p.; For_related documents', see SE 029 295-298 EDRS PRICE MF01/BCO2 Plus Postage. DESCRIPTORS *College Science: Curriculum Develoimeft: Electricity: Electromechanical lacshnology;- Electfonics: *Engineering Educatiob: Higher Education: Instructional Materials: *Problem Solving; Science CourAes:,'Science Curriculum: Science . Eductttion; *Science Materials: Scientific Concepts AOSTRACT This publication was developed as aPortion/ofa . two-semester se4uence commencing t either the-sixth cr seVenth.term of the undergraduate program in electrical engineering at the University of Pittsburgh. The materials of tfie two courses, produced by' National Science Foundation grant, are concernedwitli power con ion systems comprising power electronic devices, electromechanical energy converters, and,associnted logic configurations necessary to cause the systlp to behave in a, prescrib,ed fashion. The erphasis in this portion of the'two course E` sequende (Part 1)is on electric machinery analysis.. 7his publication is-the problem manual for Part 1, which provide's problems included in 4, the first course. (HM) 4 Reproductions supplied by EDPS are the best that can be made from the original document. * **************************v******************************************** 2 -

Study on Line-Start Permanent Magnet Assistance Synchronous Reluctance Motor for Improving Efficiency and Power Factor
energies Article Study on Line-Start Permanent Magnet Assistance Synchronous Reluctance Motor for Improving Efficiency and Power Factor Hyunwoo Kim 1 , Yeji Park 1, Huai-Cong Liu 2, Pil-Wan Han 3 and Ju Lee 1,* 1 Department of Electrical Engineering, Hanyang University, Seoul 04763, Korea; [email protected] (H.K.); [email protected] (Y.P.) 2 Hyundai Transys, Hwaseong 18280, Korea; [email protected] 3 Electric Machines and Drives Research Center, Korea Electrotechnology Research Institute, Changwon 51543, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-2220-0342 Received: 12 December 2019; Accepted: 9 January 2020; Published: 13 January 2020 Abstract: In order to improve the efficiency, a line-start synchronous reluctance motor (LS-SynRM) is studied as an alternative to an induction motor (IM). However, because of the saliency characteristic of SynRM, LS-SynRM have a limited power factor. Therefore, to improve the efficiency and power factor of electric motors, we propose a line-start permanent magnet assistance synchronous reluctance motor (LS-PMA-SynRM) with permanent magnets inserted into LS-SynRM. IM and LS-SynRM are selected as reference models, whose performances are analyzed and compared with that of LS-PMA-SynRM using a finite element analysis. The performance of LS-PMA-SynRM is analyzed considering the position and length of its permanent magnet, as well as its manufacture. The final model of LS-PMA-SynRM is designed for improving the efficiency and power factor of electric motors compared with LS-SynRM. To verify the finite element analysis (FEA) result, the final model is manufactured, experiments are conducted, and the performance of LS-PMA-SynRM is verified. -

Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 the Mighty Railgun I. Abstract the Idea of This Project Is to Build a Railgun
Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 The Mighty Railgun (All Bark no Bite) I. Abstract The idea of this project is to build a railgun capable of firing a small metal projectile at substantial velocity. The original plan was to build iterative prototypes capable of firing small projectiles, and using them to figure out the ideal design for the final version, but the smaller versions were not very successful due to their relative lack of power, so it was difficult to use them to learn what to do. The final, largest scale railgun is powered by a bank of capacitors with an equivalent capacitance of 24.6mF charged to around 350V. This produces 3013.5J of energy discharged over approximately 58.75 µs (it varies for each firing), drawing a peak of about 1425A when firing a projectile (it once again varies) and about 1600A when not firing a projectile (short circuiting the rails). The railgun is capable of consistently firing a small piece of metal (usually aluminum or copper); however the projectile does not usually travel very far, although this is hard to measure due to the nature of the gun and the speed at which the firing takes place. II. Introduction Electricity is often seemingly mysterious, but we have come to accept and understand how through the interaction of electric and magnetic fields we can create a simple motor, as we did in the first semester. A railgun is just a linear electric motor, at very high speeds. What makes it different, however, is that it uses neither magnets nor coils of wire, and relies entirely on the induced magnetic field in the rails due to the extremely large current to produce a Lorentz Force to propel the projectile (which will be discussed in greater depth in the theory section). -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

An Introductory Electric Motors and Generators Experiment for a Sophomore Level Circuits Course
AC 2008-310: AN INTRODUCTORY ELECTRIC MOTORS AND GENERATORS EXPERIMENT FOR A SOPHOMORE-LEVEL CIRCUITS COURSE Thomas Schubert, University of San Diego Thomas F. Schubert, Jr. received his B.S., M.S., and Ph.D. degrees in electrical engineering from the University of California, Irvine, Irvine CA in 1968, 1969 and 1972 respectively. He is currently a Professor of electrical engineering at the University of San Diego, San Diego, CA and came there as a founding member of the engineering faculty in 1987. He previously served on the electrical engineering faculty at the University of Portland, Portland OR and Portland State University, Portland OR and on the engineering staff at Hughes Aircraft Company, Los Angeles, CA. Prof. Schubert is a member of IEEE and ASEE and is a registered professional engineer in Oregon. He currently serves as the faculty advisor for the Kappa Eta chapter of Eta Kappa Nu at the University of San Diego. Frank Jacobitz, University of San Diego Frank G. Jacobitz was born in Göttingen, Germany in 1968. He received his Diploma in physics from the Georg-August Universität, Göttingen, Germany in 1993, as well as M.S. and Ph.D. degrees in mechanical engineering from the University of California, San Diego, La Jolla, CA in 1995 and 1998, respectively. He is currently an Associate Professor of mechanical engineering at the University of San Diego, San Diego, CA since 2003. From 1998 to 2003, he was an Assistant Professor of mechanical engineering at the University of California, Riverside, Riverside, CA. He has also been a visitor with the Centre National de la Recherche Scientifique at the Université de Provence (Aix-Marseille I), France. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Brushes for Aircraft Applications
Brushes for Aircraft Applications Bob Nuckolls AeroElectric Connection April 1993 Updated August 2003 Several times a year I receive a call or letter asking where one be 1000 hours or more of continuous motor operation! We obtains "aircraft" grade brushes for an alternator or generator. were hard pressed to demonstrate more than 600 hours from One of my readers called recently to say he had been verbally any grade of brush. This little motor runs at 22,000 rpm! There keel-hauled by an engineer with an alternator manufacturing were simply no brush products available that would last 1000 company. The reader had confessed to considering a plain hours at those commutator surface speeds. vanilla brush for use in the alternator on his RV-4. The program was nearly scuttled when project managers There's a lot of "hangar mythology" about what constitutes became fixated upon reaching the 1000-hour goal. We aircraft ratings in components. We all know that much of what researched our service records for the same motor supplied in is deemed "aircraft" today are the same products certified onto other forms for over 10 years. airplanes 30-50 years ago. Many developers and suppliers consider aviation a "dying" market; few are interested in Clutches and brakes turned out to be the #1 service problem. researching and qualifying new products. However, Brake problems occurred at 300 to 500 flight hours, not motor automotive markets continue to advance in every technology. operating hours. Given that trim operations might run a pitch It is sad to note that many products found on cars today far trim actuator perhaps 3 minutes total per flight cycle, 1000 exceed the capabilities and quality of similar hardware found hours of flight on a Lear might put less than 50 hours on certified airplanes. -

Direct Torque Control of Induction Motors
DIRECT TORQUE CONTROL FOR INDUCTION MOTOR DRIVES MAIN FEATURES OF DTC · Decoupled control of torque and flux · Absence of mechanical transducers · Current regulator, PWM pulse generation, PI control of flux and torque and co-ordinate transformation are not required · Very simple control scheme and low computational time · Reduced parameter sensitivity BLOCK DIAGRAM OF DTC SCHEME + _ s* s j s + Djs _ Voltage Vector s * T + j s DT Selection _ T S S S s Stator a b c Torque j s s E Flux vs 2 Estimator Estimator 3 s is 2 i b i a 3 Induction Motor In principle the DTC method selects one of the six nonzero and two zero voltage vectors of the inverter on the basis of the instantaneous errors in torque and stator flux magnitude. MAIN TOPICS Þ Space vector representation Þ Fundamental concept of DTC Þ Rotor flux reference Þ Voltage vector selection criteria Þ Amplitude of flux and torque hysteresis band Þ Direct self control (DSC) Þ SVM applied to DTC Þ Flux estimation at low speed Þ Sensitivity to parameter variations and current sensor offsets Þ Conclusions INVERTER OUTPUT VOLTAGE VECTORS I Sw1 Sw3 Sw5 E a b c Sw2 Sw4 Sw6 Voltage-source inverter (VSI) For each possible switching configuration, the output voltages can be represented in terms of space vectors, according to the following equation æ 2p 4p ö s 2 j j v = ç v + v e 3 + v e 3 ÷ s ç a b c ÷ 3 è ø where va, vb and vc are phase voltages. -

DRM105, PM Sinusoidal Motor Vector Control with Quadrature
PM Sinusoidal Motor Vector Control with Quadrature Encoder Designer Reference Manual Devices Supported: MCF51AC256 Document Number: DRM105 Rev. 0 09/2008 How to Reach Us: Home Page: www.freescale.com Web Support: http://www.freescale.com/support USA/Europe or Locations Not Listed: Freescale Semiconductor, Inc. Technical Information Center, EL516 2100 East Elliot Road Tempe, Arizona 85284 1-800-521-6274 or +1-480-768-2130 www.freescale.com/support Europe, Middle East, and Africa: Freescale Halbleiter Deutschland GmbH Technical Information Center Information in this document is provided solely to enable system and Schatzbogen 7 software implementers to use Freescale Semiconductor products. There are 81829 Muenchen, Germany no express or implied copyright licenses granted hereunder to design or +44 1296 380 456 (English) fabricate any integrated circuits or integrated circuits based on the +46 8 52200080 (English) information in this document. +49 89 92103 559 (German) +33 1 69 35 48 48 (French) www.freescale.com/support Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, Japan: representation or guarantee regarding the suitability of its products for any Freescale Semiconductor Japan Ltd. particular purpose, nor does Freescale Semiconductor assume any liability Headquarters arising out of the application or use of any product or circuit, and specifically ARCO Tower 15F disclaims any and all liability, including without limitation consequential or 1-8-1, Shimo-Meguro, Meguro-ku, incidental damages. “Typical” parameters that may be provided in Freescale Tokyo 153-0064 Semiconductor data sheets and/or specifications can and do vary in different Japan applications and actual performance may vary over time. -

Understanding Permanent Magnet Motor Operation and Optimized Filter Solutions
Understanding Permanent Magnet Motor Operation and Optimized Filter Solutions June 15, 2016 Todd Shudarek, Principal Engineer MTE Corporation N83 W13330 Leon Road Menomonee Falls WI 53154 www.mtecorp.com Abstract Recent trends indicate the use of permanent magnet (PM) motors because of its energy savings over induction motors. PM motors offer energy savings, higher power densities, and improved control. The upfront cost of a PM motor may be higher than an induction motor, but the total cost of ownership may be lower. However, a PM motor system brings design challenges in terms of selecting the best variable frequency drive (VFD) as well as a filter to protect the motor. A PM motor requires the use of a VFD to start and operate. The best VFDs will need to operate at higher switching frequencies to meet the higher fundamental frequencies of the PM motors. In turn, the PM motor will need to be protected from power distortion, harmonics, and overheating. While a traditional filter is de-rated to meet the higher frequencies, this paper will demonstrate that, by nature of the operation of a PM motor, an appropriately design filter that operates for higher switching and fundamental frequencies will reduce the size, weight, and cost of the system. Introduction special considerations when specifying a filter for a PM motor system, specifically the use of Historically induction motors have been used in higher switching frequencies and filters. a variety of industrial applications. Recent trends indicate a shift toward permanent magnet (PM) motors which offer up to 20% energy savings, Induction Motor Operation higher power densities, and improved control. -

The Fundamentals of Ac Electric Induction Motor Design and Application
THE FUNDAMENTALS OF AC ELECTRIC INDUCTION MOTOR DESIGN AND APPLICATION by Edward J. Thornton Electrical Consultant E. I. du Pont de Nemours Houston, Texas and J. Kirk Armintor Senior Account Sales Engineer Rockwell Automation The Woodlands, Texas Edward J. (Ed) Thornton is an Electrical Electrical Mechanical Consultant in the Electrical Technology Coupling System Field System Consulting Group in Engineering at DuPont, in Houston, Texas. His specialty is the design, operation, and maintenance of electric power distribution systems and large motor installations. He has 20 years E , I T , w of consulting experience with DuPont. Mr. Thornton received his B.S. degree Figure 1. Block Representation of Energy Conversion for Motors. (Electrical Engineering, 1978) from Virginia Polytechnic Institute and State University. The coupling magnetic field is key to the operation of electrical He is a registered Professional Engineer in the State of Texas. apparatus such as induction motors. The fundamental laws associated with the relationship between electricity and magnetism were derived from experiments conducted by several key scientists J. Kirk Armintor is a Senior Account in the 1800s. Sales Engineer in the Rockwell Automation Houston District Office, in The Woodlands, Basic Design and Theory of Operation Texas. He has 32 years’ experience with The alternating current (AC) induction motor is one of the most motor applications in the petroleum, rugged and most widely used machines in industry. There are two chemical, paper, and pipeline industries. major components of an AC induction motor. The stationary or He has authored technical papers on motor static component is the stator. The rotating component is the rotor.