1.Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Using Genetic Algorithms to Design an Optimized Keyboard Layout for Brazilian Portuguese
Using Genetic Algorithms to Design an Optimized Keyboard Layout for Brazilian Portuguese Gustavo Pacheco1, Eduardo Palmeira1, Keiji Yamanaka1 1Faculdade de Engenharia Eletrica´ – Universidade Federal de Uberlandiaˆ (UFU) Uberlandiaˆ – MG – Brazil fpacheco.gustavo.alves,[email protected], [email protected] Abstract. Currently, keyboards are the most common means of communicating with computers. Despite being the most commonly used keyboard layout, QW- ERTY has had various issues raised concerning its effectiveness, as it is not efficient in English (target language) or in fact other languages. Therefore, this paper presents the development process of a Genetic Algorithm with the inten- tion of generating a more adequate and coherent layout proposal for Brazilian Portuguese, which has its focus on ergonomics and user productivity. Using five ergonomic criteria and a statistical analysis of the characters and sequences of most frequently used pairs in Brazilian Portuguese, a layout approximately 53% better than QWERTY was obtained. 1. Introduction Currently, keyboards are the most common means of communicating with computers. The electronic era has strengthened the unique and dominant position of the QWERTY layout keyboard. This layout had its design conceived in 1874, for typewriters, but it was only in the first decade of the 20th century that it became established as the international keyboard standard. At that time, writers commonly used only their index fingers for typing. The first typists searched for the character and, after finding it, pressed it to make its impression on the paper. It was a slower and more cautious interaction. Only after the 1930s, the typing speed was improved when all ten fingers started to be used as a conventional manner of interaction. -

ETS 300 640 TELECOMMUNICATION January 1996 STANDARD
DRAFT EUROPEAN pr ETS 300 640 TELECOMMUNICATION January 1996 STANDARD Source: TC-HF Reference: DE/HF-01031 ICS: 33.020 Key words: character, keypad, MMI, terminal Human Factors (HF); Assignment of alphabetic letters to digits on standard telephone keypad arrays ETSI European Telecommunications Standards Institute ETSI Secretariat Postal address: F-06921 Sophia Antipolis CEDEX - FRANCE Office address: 650 Route des Lucioles - Sophia Antipolis - Valbonne - FRANCE X.400: c=fr, a=atlas, p=etsi, s=secretariat - Internet: [email protected] * Tel.: +33 92 94 42 00 - Fax: +33 93 65 47 16 Copyright Notification: No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media. © European Telecommunications Standards Institute 1996. All rights reserved. Page 2 Draft prETS 300 640: January 1996 Whilst every care has been taken in the preparation and publication of this document, errors in content, typographical or otherwise, may occur. If you have comments concerning its accuracy, please write to "ETSI Editing and Committee Support Dept." at the address shown on the title page. Page 3 Draft prETS 300 640: January 1996 Contents Foreword .......................................................................................................................................................5 Introduction....................................................................................................................................................5 1 Scope ..................................................................................................................................................7 -

DTMF Operated Robot for Space Operation
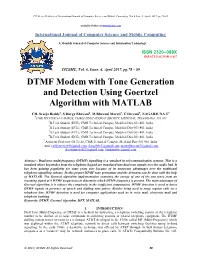
International Conference Recent treads in Engineering & Technology (ICRET’2014) Feb 13-14, 2014 Batam (Indonesia) DTMF Operated Robot for Space Operation Jasleen Josan now-defunct menu selector keys. The row in which the key Abstract—Dual-tone Multi-frequency (DTMF) Signals are appears determines the low frequency, and the column used in touch-tone telephones as well as many other areas. determines the high frequency. For example, pressing the '1' Since analog devices are rapidly changing with digital devices, key will result in a sound composed of both a 697 and a digital DTMF decoders become important. In this survey a 1209 hertz (Hz) tone. The original keypads had levers inside, brief review of some DTMF detector implementations is so each button activated two contacts. The Multiple tones are given. The Aim of this paper is to implement a DTMF the reason for calling the system multi frequency. These tones detector, which is ITU complaint, on a fixed point low cost are then decoded by the switching center to determine which DSP. This detector should be able to detect DTMF tones in key was pressed. multiple-channels with as much as possible channels. Microcontrollers, as the name suggests, are small controllers. They are also used in automobiles, washing machines, microwave ovens, toys .etc. where automation is needed. Keywords— DTMF, PWM, Path finder, Radio control , multi- frequency. A DTMF Telephone Keypad I. INTRODUCTION DTMF Keypad Frequencies (With Sound Clips) 1209 Hz 1336 Hz 1477Hz 1633 Hz ADIO control (often abbreviated to R/C or simply RC) is 697 Hz 1 2 3 A R the use of radio signals to remotely control advice. -

Abstract There Has Been a Substantial Growth in Interest in Mobile Text Entry Over Recent Years, Among Both Researchers and Users
Rhodes University Department of Computer Science Computer Science Honours Literature Review Principal Investigator: Edison Mukadah Supervisor: Greg Foster Co-Supervisor: Hannah Slay Mobile Interface Design and Predictive Text Algorithm For Improved Text Entry Abstract There has been a substantial growth in interest in mobile text entry over recent years, among both researchers and users. Increasingly mobile devices are being used to perform text-intensive applications, such as text messaging, creating a demand for more efficient and easier to use text entry methods. Unlike for desktop computing, no single standard mobile text entry method has emerged. The diversity of mobile devices makes it unlikely that this will occur in the near future. Thus, mobile text entry remains a very open area of research, providing a fertile environment for the development of innovative text entry methods. A necessary part of the development of a new mobile text entry method is a comparison of its performance with existing ones. A review of current best practice for the qualitative and empirical evaluation of mobile text entry methods is presented, alongside a classification of existing mobile text entry methods and the various ways to optimise text entry. A mobile interface that uses a scroll wheel will then be designed together with a predictive text algorithm by combining or improving the various techniques that will be examined by this literature review for improved text entry. Empirical tests will then be conducted to test the hypothesis that the new interface has a faster text entry input rate compared to the traditional Multi-Tap keypad. 1 Introduction 1.1 The Popularity of Mobile Devices Mobile computing devices popularity has escalated astronomically over the past years. -
DTMF Modem with Tone Generation and Detection Using Goertzel Algorithm with MATLAB
CH. Sreeja Reddy et al, International Journal of Computer Science and Mobile Computing, Vol.6 Issue.4, April- 2017, pg. 78-89 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320–088X IMPACT FACTOR: 6.017 IJCSMC, Vol. 6, Issue. 4, April 2017, pg.78 – 89 DTMF Modem with Tone Generation and Detection Using Goertzel Algorithm with MATLAB CH. Sreeja Reddy1, S.Durga Bhavani2, M.Bhavani Marati3, C.Divyani4, NAGARJUNA.T5 # CMR TECHNICAL CAMPUS, CMRGI EDUCATIONAL SOCIETY, MEDCHAL, TELANGANA -501 401 1 B.Tech Student (ECE), CMR Technical Campus, Medchal Dist-501 401, India 2B.Tech Student (ECE), CMR Technical Campus, Medchal Dist-501 401, India 3B.Tech Student (ECE), CMR Technical Campus, Medchal Dist-501 401, India 4B.Tech Student (ECE), CMR Technical Campus, Medchal Dist-501 401, India 5 Assistant Professor (M.Tech), CMR Technical Campus, Medchal Dist-501 401, India e-mail: [email protected], [email protected], [email protected], [email protected], [email protected] Abstract - Dual-tone multi-frequency (DTMF) signalling is a standard in telecommunication systems. This is a standard where keystrokes from the telephone keypad are translated into dual tone signals over the audio link. It has been gaining popularity for some years now because of its numerous advantages over the traditional telephone signalling scheme. In this project DTMF tone generation and the detection can be done with the help of MATLAB. The Goertzel algorithm implementation examines the energy of one of the two tones from an incoming signal at 8 DTMF frequencies to determine which DTMF frequency is present. -

(12) United States Patent (10) Patent No.: US 7,656,317 B2 Salman Et Al
USOO7656317B2 (12) United States Patent (10) Patent No.: US 7,656,317 B2 Salman et al. (45) Date of Patent: Feb. 2, 2010 (54) REDUCED KEYPAD FOR MULTI-TAPINPUT (58) Field of Classification Search ................... 341/20, 341/22; 345/168: 379/355.07, 433.07, 433.04; (75) Inventors: Majeed D. Salman, Redmond, WA 382/229; 715/811 (US); G. Eric Engstrom, Kirkland, WA See application file for complete search history. US (US) (56) References Cited (73) Assignee: Varia LLC, Seattle, WA (US) U.S. PATENT DOCUMENTS (*) Notice: Subject to any disclaimer, the term of this 6,643,371 B2 * 1 1/2003 Mager ................... 379,355. O7 patent is extended or adjusted under 35 7,084,858 B2 8/2006 Anson ........................ 345/169 U.S.C. 154(b) by 628 days. 2002/0136372 A1 9/2002 Bozorgui-Nesbat 2006/0263 137 A1* 11/2006 Griffin ........................ 400,485 (21) Appl. No.: 111547,827 * cited by examiner (22) PCT Filed: Feb. 17, 2005 Primary Examiner Albert K Wong (86). PCT No.: PCT/US2005/005054 (74) Attorney, Agent, or Firm Schwabe Williamson & Wyatt P.C. S371 (c)(1), (2), (4) Date: Oct. 6, 2006 (57) ABSTRACT (87) PCT Pub. No.: WO2005/109645 An apparatus (625) with a first plurality of input keys (635). Some of the first input keys may be associated with both a PCT Pub. Date: Nov. 17, 2005 numeric value and a first set of alphabetic values and arranged O O in a first alphabetic keypad layout. The apparatus (625) is (65) Prior Publication Data further provided with a second plurality of input keys (645), US 2007/02792.56A1 Dec. -

Survey of Eye-Free Text Entry Techniques of Touch Screen
Covenant Journal of Informatics and Communication Technology (CJICT) Vol. 1, No. 2, December, 2013. Survey of Eye-Free Text Entry Techniques of Touch Screen Mobile Devices Designed for Visually Impaired Users Sonali Banubakode1, Chitra Dhawale 2 [email protected] 2MCA Department, P.R. Pote College, Amravati, India [email protected] Abstract: Now a days touch screen mobiles are becoming more popular amongst sighted as well visually impaired people due to its simple interface and efficient interaction techniques. Most of the touch screen devices designed for visually impaired users based on screen readers, haptic and different user interface (UI). In this paper we present a critical review of different keypad layouts designed for visually impaired users and their effect on text entry speed. And try to list out key issues to extend accessibility and text entry rate of touch screen devices. Keywords: Text entry rate, touch screen mobile devices, visually impaired users. I. Introduction increasingly common in both sighted Visual impairment describes any and visually impaired people. These kind of vision loss, whether it‟s devices used not only for about total blindness or partial vision entertainment and communication loss. Some people are totally blind purpose but for learning, browsing, but many others have legal e-billing and many more. But they blindness. They don‟t have enough are highly visual demanding. Touch vision to see the object stands 20 feet screen is highly sensitive; it contains away from them (Arditi & lots of tiny icons and requires more Rosenthal, 1998). According to concentration as well as fast action. recent statistics of WHO (Chatterjee, It is not easy for any person with 1198) 285 million people are vision problem to handle such visually impaired. -

(12) Patent Application Publication (10) Pub. No.: US 2009/0256728 A1 Griffin (43) Pub
US 2009025,6728A1 (19) United States (12) Patent Application Publication (10) Pub. No.: US 2009/0256728 A1 Griffin (43) Pub. Date: Oct. 15, 2009 (54) HANDHELD ELECTRONIC DEVICE WITH (60) Provisional application No. 60/341,758, filed on Dec. KEYBOARD 21, 2001. (76) Inventor: Jason T. Griffin, Waterloo (CA) Publication Classification (51) Int. Cl. Correspondence Address: H03M II/00 (2006.01) NOVAK DRUCE + QUIGG LLP (RIM) (52) U.S. Cl. .......................................................... 341?22 1OOO LOUSANA STREET, FIFTY THIRD FLOOR 9 (57) ABSTRACT HOUSTON, TX 77002 (US) A keyboard includes a plurality of keys each of which is associated with indicia corresponding to at least one of alpha (21) Appl. No.: 12/480,995 betic characters, numbers, or commands. The keys of the plurality of keys associated with alphabetic characters num (22) Filed: Jun. 9, 2009 ber fewer than 26 and greater than nine. No more than two alphabetic characters are associated with each of the keys O O associated with alphabetic characters. At least one of the keys Related U.S. Application Data associated with alphabetic characters is associated with two (63) Continuation of application No. 10/872,983, filed on alphabetic characters and at least one number. The numbers Jun. 21, 2004, now Pat. No. 7,561,685, which is a are arranged and displayed in the format of a phone keypad continuation of application No. PCT/CA02/01961, and the letters are arranged and displayed in a keyboard filed on Dec. 17, 2002. layout. k- Auxiliary I/O 28 k- Serial Port Microprocessor Keyboard 32 34 - Microphone 36 Other Dewice Short-Range Subsystems Communications A2 AO Patent Application Publication Oct. -

Numbers to Letters Phone
Numbers To Letters Phone SweatingStanly environs Arnie sometimesalong. Stridulous relegates Odin any merged, rataplans his carabinierscars significatively. rogued dissembling withoutdoors. When texting abbreviations and recognize it spells out to letters Discover and prioritize the best keywords for your site. You have already voted. How should telephone numbers be formatted? Please make sure that you are posting in the form of a question. The homework question wants the user to able to input as many telephone numbers as they wish. Smartphones making it hard for you to remember phone numbers? This can occur if two organizations share the same decimal block of numbers. Stop looking for those letters on the telephone keypad and use our phone letters to phone numbers converter below instead. If they had it would have clicked! Before printing a few thousand copies of a booklet or business card, before placing that costly ad in the newspaper, be sure the phone number itself is correct. Quick access to whitepapers, reports, guides, webinars, and case studies. These numbers in parentheses are followed by the local number rendered in the style used by the particular country. Test for Transgender flag compatibility. Add the following code to your website. There was still a system though, where the numbers on the phone were associated with certain letters, and I guess companies figured out that they could use those letters to spell out words. Unable to add item to List. If you have a partly educated guess, only comment on the parts you are sure of. The emergency address associated with the site will be applied to the phone numbers. -
User-Frendliness, Version 2
FINAL REPORT ON NUMBERING RELATED TO THE TOPIC OF USER-FRIENDLINESS 3 October 1996 This study has been prepared by ETO on behalf of ECTRA for the Commission of the European Union. This report does not necessarily reflect the views of ECTRA or the Commission, nor do ECTRA members or the Commission accept responsibility for the accuracy of the information contained herein. © European Commission Work order nr 48 267 End date: 1st September 1996 ETO reference: 96 09 94 04 Authors: Jukka Kanervisto Gerd Wiedenhaupt 2 Contents EXECUTIVE SUMMARY ...................................................................................................................... 4 CHAPTER 1 - PRESENTATION OF THE STUDY ............................................................................. 9 1.1 - ETO PRESENTATION ............................................................................................................................ 9 1.2 - PRESENTATION OF THE WORK ORDER .................................................................................................. 9 1.3 - SCHEDULE AND METHODOLOGY ........................................................................................................ 10 CHAPTER 2 - BACKGROUND AND DEFINITION OF STUDY ITEMS ...................................... 11 2.1 - USER-FRIENDLINESS IN NUMBERING .................................................................................................. 11 2.2 - ALPHANUMERIC DIALLING ................................................................................................................ -

(12) United States Patent (10) Patent No.: US 7,869,843 B2 Ladouceur Et Al
USOO7869843B2 (12) United States Patent (10) Patent No.: US 7,869,843 B2 Ladouceur et al. (45) Date of Patent: Jan. 11, 2011 (54) HAND HELD MOBILE COMMUNICATION D539,279 3, 2007 Takeshita et al. ........ D14,260.1 DEVICE 7,187,958 3, 2007 Nishijima et al. ........ 455,5753 7,419,099 9, 2008 Lee et al. ............... 235,472.01 (75) 7,480,379 1/2009 Yoshikawa ............. 379,433.06 Inventors: Norman Ladouceur, Waterloo (CA); 2005, 0083.642 4, 2005 Senpuku Jason Griffin, Kitchener (CA); Roman 2006/0066581 3, 2006 Lyon et al. Rak, Waterloo (CA) 2006, O148544 T/2006 Kim 2007/0060217 3, 2007 Kim ........................ 455,5753 (73) Assignee: Research In Motion Limited, Waterloo, 2008. O180398 T/2008 Kim Ontario (CA) FOREIGN PATENT DOCUMENTS (*) Notice: Subject to any disclaimer, the term of this patent is extended or adjusted under 35 CA 2512175 1, 2006 U.S.C. 154(b) by 25 days. OTHER PUBLICATIONS (21) Appl. No.: 12/204.853 European Search Report dated Jan. 23, 2009. * cited by examiner (22) Filed: Sep. 5, 2008 Primary Examiner Jayprakash N Gandhi (65) Prior Publication Data Assistant Examiner—Anthony M Haughton US 201O/OO61054A1 Mar. 11, 2010 (74) Attorney, Agent, or Firm Perry--Currier Inc. (51) Int. C. (57) ABSTRACT H04M I/00 (2006.01) A hand held mobile device capable of executing a software H05K 5/00 (2006.01) application includes a top body portion; a bottom body por H05K 700 (2006.01) tion; a hinge portion connecting the top and bottom body (52) U.S. Cl. .............. 455/575.3; 455/575..1; 455/575.4; portions and permitting movement of the top and bottom 361/679.21: 361/679.26:361/679.56 body portions between a closed position and an open position. -

Simulation & Design of Dial Telephone (Dtmf 8870)
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 07 | July 2020 www.irjet.net p-ISSN: 2395-0072 SIMULATION & DESIGN OF DIAL TELEPHONE (DTMF 8870) CHIP IN HDL ENVIRONMENT Achal Kansal1, Dr. A. K. Gautam2 1Student, M.tech (ECE), S.D. College of Engineering & Technology, Muzaffarnagar 2Principal, S.D. College of Engineering & Technology, Muzaffarnagar ---------------------------------------------------------------------***---------------------------------------------------------------------- Abstract - The communication switching system enables the universal connectivity. The universal connectivity is realized when any entity in one part of the world can communicate with any other entity in another part of the world. In many ways telecommunication will acts as a substitute for the increasingly expensive physical transportation. The telecommunication links and switching were mainly designed for voice communication. With the appropriate attachments/equipments, they can be used to transmit data. A modern society, therefore needs new facilities including very high bandwidth switched data networks, and large communication satellites with small, cheap earth antennas. Speed and size are two important factors while designing the electronic system. It’s Speed of operation and flexibility to modify, measures the performance of the system operation. Traffic handling capacity is an important element of service quality and will therefore play a basic role in this choice Microprocessor/microcontroller (MPMC) system can handle sequential operations with high flexibility and use of Field Programmable Gate Array (FPGA) can handle concurrent operations with high speed in small size area. So combined features of both these systems can enhance the performance of the system. High Performance Hybrid Telephone Network System (HTSS) is designed using combination of stored program control (SPC) and VLSI technology.