This Is an Electronic Reprint of the Original Article. This Reprint May Differ from the Original in Pagination and Typographic Detail
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Infinitely Many Coexisting Attractors in No-Equilibrium Chaotic System
Hindawi Complexity Volume 2020, Article ID 8175639, 17 pages https://doi.org/10.1155/2020/8175639 Research Article Infinitely Many Coexisting Attractors in No-Equilibrium Chaotic System Qiang Lai ,1 Paul Didier Kamdem Kuate ,2 Huiqin Pei ,1 and Hilaire Fotsin 2 1School of Electrical and Automation Engineering, East China Jiaotong University, Nanchang 330013, China 2Laboratory of Condensed Matter, Electronics and Signal Processing Department of Physics, University of Dschang, P.O. Box 067, Dschang, Cameroon Correspondence should be addressed to Qiang Lai; [email protected] Received 17 January 2020; Revised 18 February 2020; Accepted 26 February 2020; Published 28 March 2020 Guest Editor: Chun-Lai Li Copyright © 2020 Qiang Lai et al. *is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. *is paper proposes a new no-equilibrium chaotic system that has the ability to yield infinitely many coexisting hidden attractors. Dynamic behaviors of the system with respect to the parameters and initial conditions are numerically studied. It shows that the system has chaotic, quasiperiodic, and periodic motions for different parameters and coexists with a large number of hidden attractors for different initial conditions. *e circuit and microcontroller implementations of the system are given for illustrating its physical meaning. Also, the synchronization conditions of the system are established based on the adaptive control method. 1. Introduction system may generate hidden attractor. Also, a lot of pre- vious studies have shown that chaotic systems with mul- Encouraging progress has been made on chaos in the past tiple unstable equilibria usually have richer dynamic few decades. -

The Lorenz System : Hidden Boundary of Practical Stability and the Lyapunov Dimension
This is a self-archived version of an original article. This version may differ from the original in pagination and typographic details. Author(s): Kuznetsov, N. V.; Mokaev, T. N.; Kuznetsova, O. A.; Kudryashova, E. V. Title: The Lorenz system : hidden boundary of practical stability and the Lyapunov dimension Year: 2020 Version: Published version Copyright: © 2020 the Authors Rights: CC BY 4.0 Rights url: https://creativecommons.org/licenses/by/4.0/ Please cite the original version: Kuznetsov, N. V., Mokaev, T. N., Kuznetsova, O. A., & Kudryashova, E. V. (2020). The Lorenz system : hidden boundary of practical stability and the Lyapunov dimension. Nonlinear Dynamics, 102(2), 713-732. https://doi.org/10.1007/s11071-020-05856-4 Nonlinear Dyn https://doi.org/10.1007/s11071-020-05856-4 ORIGINAL PAPER The Lorenz system: hidden boundary of practical stability and the Lyapunov dimension N. V. Kuznetsov · T. N. Mokaev · O. A. Kuznetsova · E. V. Kudryashova Received: 16 March 2020 / Accepted: 29 July 2020 © The Author(s) 2020 Abstract On the example of the famous Lorenz Keywords Global stability · Chaos · Hidden attractor · system, the difficulties and opportunities of reliable Transient set · Lyapunov exponents · Lyapunov numerical analysis of chaotic dynamical systems are dimension · Unstable periodic orbit · Time-delayed discussed in this article. For the Lorenz system, the feedback control boundaries of global stability are estimated and the difficulties of numerically studying the birth of self- excited and hidden attractors, caused by the loss of 1 Introduction global stability, are discussed. The problem of reliable numerical computation of the finite-time Lyapunov In 1963, meteorologist Edward Lorenz suggested an dimension along the trajectories over large time inter- approximate mathematical model (the Lorenz system) vals is discussed. -

Phase-Locked Loops with Active PI Filter: the Lock-In Range Computation JYVÄSKYLÄ STUDIES in COMPUTING 239
JYVÄSKYLÄ STUDIES IN COMPUTING 239 Konstantin Aleksandrov Phase-Locked Loops with Active PI Filter: the Lock-In Range Computation JYVÄSKYLÄ STUDIES IN COMPUTING 239 Konstantin Aleksandrov Phase-Locked Loops with Active PI Filter: the Lock-In Range Computation Esitetään Jyväskylän yliopiston informaatioteknologian tiedekunnan suostumuksella julkisesti tarkastettavaksi yliopiston Agora-rakennuksen Alfa-salissa kesäkuun 17. päivänä 2016 kello 10. Academic dissertation to be publicly discussed, by permission of the Faculty of Information Technology of the University of Jyväskylä, in building Agora, Alfa hall, on June 17, 2016 at 10 o’clock. UNIVERSITY OF JYVÄSKYLÄ JYVÄSKYLÄ 2016 Phase-Locked Loops with Active PI Filter: the Lock-In Range Computation JYVÄSKYLÄ STUDIES IN COMPUTING 239 Konstantin Aleksandrov Phase-Locked Loops with Active PI Filter: the Lock-In Range Computation UNIVERSITY OF JYVÄSKYLÄ JYVÄSKYLÄ 2016 Editors Timo Männikkö Department of Mathematical Information Technology, University of Jyväskylä Pekka Olsbo, Ville Korkiakangas Publishing Unit, University Library of Jyväskylä URN:ISBN:978-951-39-6688-1 ISBN 978-951-39-6688-1 (PDF) ISBN 978-951-39-6687-4 (nid.) ISSN 1456-5390 Copyright © 2016, by University of Jyväskylä Jyväskylä University Printing House, Jyväskylä 2016 ABSTRACT Aleksandrov, Konstantin Phase-locked loops with active PI filter: the lock-in range computation Jyväskylä: University of Jyväskylä, 2016, 38 p.(+included articles) (Jyväskylä Studies in Computing ISSN 1456-5390; 239) ISBN 978-951-39-6687-4 (nid.) ISBN 978-951-39-6688-1 (PDF) Finnish summary Diss. The present work is devoted to the study of the lock-in range of phase-locked loop (PLL). The PLL concept was originally described by H. -

Hidden Bifurcation in the Multispiral Chua Attractor Menacer Tidjani, René Lozi, Leon Chua
Hidden bifurcation in the Multispiral Chua Attractor Menacer Tidjani, René Lozi, Leon Chua To cite this version: Menacer Tidjani, René Lozi, Leon Chua. Hidden bifurcation in the Multispiral Chua Attractor. International journal of bifurcation and chaos in applied sciences and engineering , World Scientific Publishing, 2016, 26 (14), pp.1630039-1 1630023-26. 10.1142/S0218127416300391. hal-01488550 HAL Id: hal-01488550 https://hal.archives-ouvertes.fr/hal-01488550 Submitted on 13 Mar 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. January 6, 2017 11:8 WSPC/S0218-1274 1630039 Published in International Journal of Bifurcation and Chaos, Personal file Vol. 26, No. 14, (2016), 1630039-1 to 1630039-26 DOI 10.1142/S0218127416300391 Hidden Bifurcations in the Multispiral Chua Attractor Tidjani Menacer Department of Mathematics, University Mohamed Khider, Biskra, Algeria [email protected] Ren´eLozi Universit´eCˆote d’Azur, CNRS, LJAD, Parc Valrose 06108, Nice C´edex 02, France [email protected] Leon O. Chua Department of Electrical Engineering and Computer Sciences, University of California, Berkeley, CA 94720, USA [email protected] Received August 20, 2016 We introduce a novel method revealing hidden bifurcations in the multispiral Chua attractor in the case where the parameter of bifurcation c which determines the number of spiral is discrete. -

A New 4-D Chaotic System with Hidden Attractor and Its Circuit Implementation
International Journal of Engineering & Technology, 7 (3) (2018) 1245-1250 International Journal of Engineering & Technology Website: www.sciencepubco.com/index.php/IJET doi: 10.14419/ijet.v7i3.9846 Research paper A New 4-D Chaotic System with Hidden Attractor and its Circuit Implementation Aceng Sambas1*, Mustafa Mamat2, Sundarapandian Vaidyanathan3, Mohamad Afendee Mohamed2 and W. S. Mada Sanjaya4 1Department of Mechanical Engineering, Universitas Muhammadiyah Tasikmalaya, Indonesia 2Faculty of Informatics and Computing, Universiti Sultan Zainal Abidin, Malaysia 3Research and Development Centre, Vel Tech University, Avadi, Chennai, India 4Department of Physics, Universitas Islam Negeri Sunan Gunung Djati Bandung, Indonesia *[email protected] Abstract In the chaos literature, there is currently significant interest in the discovery of new chaotic systems with hidden chaotic attractors. A new 4-D chaotic system with only two quadratic nonlinearities is investigated in this work. First, we derive a no-equilibrium chaotic system and show that the new chaotic system exhibits hidden attractor. Properties of the new chaotic system are analyzed by means of phase portraits, Lyapunov chaos exponents, and Kaplan-Yorke dimension. Then an electronic circuit realization is shown to validate the chaotic behavior of the new 4-D chaotic system. Finally, the physical circuit experimental results of the 4-D chaotic system show agreement with numerical simulations. Keywords: Chaos, chaotic systems,circuit simulation, hidden attractors, Lyapunov exponents 1. Introduction chaos exponents of a chaotic system are determined using Wolf’s algorithm [53]. In the literature, there is also good interest shown Chaos theory deals with nonlinear dynamical systems that are highly in building electronic circuit designs of chaotic systems and imple- sensitive to initial conditions. -

Looking More Closely to the Rabinovich-Fabrikant System
Looking more closely to the Rabinovich-Fabrikant system MARIUS-F. DANCA Dept. of Mathematics and Computer Science, Avram Iancu University of Cluj-Napoca, Romania and Romanian Institute of Science and Technology, Cluj-Napoca, Romania [email protected] MICHAL FECKAN˘ Department of Mathematical Analysis and Numerical Mathematics Comenius University in Bratislava, Slovakia and Mathematical Institute Slovak Academy of Sciences Bratislava, Slovakia [email protected] NIKOLAY KUZNETSOV Department of Applied Cybernetics Saint-Petersburg State University, Russia and University of Jyv¨askyl¨a,Finland [email protected] GUANRONG CHEN Department of Electronic Engineering, City University of Hong Kong, Hong Kong SAR, China [email protected] October 2, 2015 Abstract Recently, we look more closely into the Rabinovich-Fabrikant system, after a decade of the study in [Danca & Chen(2004)], discovering some new characteristics such as cycling chaos, transient chaos, chaotic hidden attractors and a new kind of saddles-like attractor. In addition to extensive and accurate numerical analysis, on the assumptive existence of heteroclinic orbits, we provide a few of their approximations. arXiv:1509.09206v2 [nlin.CD] 1 Oct 2015 Rabinovich-Fabrikant system; cycling chaos; transient chaos; heteroclinic orbit; LIL numerical method 1 Introduction Rabinovich & Fabrikant [1979] introduced and analyzed from physical point of view a model describing the stochasticity arising from the modulation instability in a non-equilibrium dissipative medium. This is a simplification of a complex nonlinear parabolic equation modelling different physical systems, such as the Tollmien-Schlichting waves in hydrodynamic flows, wind waves on water, concentration waves during chemical reactions in a medium where diffusion occur, Langmuir waves in plasma, etc. -
Hidden Attractors on One Path: Glukhovsky-Dolzhansky, Lorenz, and Rabinovich Systems
Hidden attractors on one path: Glukhovsky-Dolzhansky, Lorenz, and Rabinovich systems G. Chen,1 N.V. Kuznetsov,2, 3 G.A. Leonov,2, 4 and T.N. Mokaev2 1City University of Hong Kong, Hong Kong SAR, China 2Faculty of Mathematics and Mechanics, St. Petersburg State University, Peterhof, St. Petersburg, Russia 3Department of Mathematical Information Technology, University of Jyv¨askyl¨a,Jyv¨askyl¨a,Finland 4Institute of Problems of Mechanical Engineering RAS, Russia (Dated: October 2, 2018) In this report, by the numerical continuation method we visualize and connect hidden chaotic sets in the Glukhovsky-Dolzhansky, Lorenz and Rabinovich systems using a certain path in the parameter space of a Lorenz-like system. I. INTRODUCTION The Glukhovsky-Dolzhansky system describes the con- vective fluid motion inside a rotating ellipsoidal cavity. In 1963, meteorologist Edward Lorenz suggested an ap- If we set proximate mathematical model (the Lorenz system) for a < 0; σ = ar; (7) the Rayleigh-B´enardconvection and discovered numeri- − cally a chaotic attractor in this model [1]. This discovery then after the linear transformation (see, e.g., [8]): stimulated rapid development of the chaos theory, nu- 1 1 1 1 1 merical methods for attractor investigation, and till now (x; y; z) ν1− y; ν1− ν2− h x; ν1− ν2− h z) ; t ν1 t has received a great deal of attention from different fields ! ! [2{7]. The Lorenz system gave rise to various generaliza- with positive ν1; ν2; h, we obtain the Rabinovich system tions, e.g. Lorenz-like systems, some of which are also [10, 11], describing the interaction of three resonantly simplified mathematical models of physical phenomena. -
Unusual Dynamics and Hidden Attractors of the Rabinovich-Fabrikant System
Nonlinear Dynamics manuscript No. (will be inserted by the editor) Unusual dynamics and hidden attractors of the Rabinovich-Fabrikant system Marius-F. Danca · Nikolay Kuznetsov · Guanrong Chen the date of receipt and acceptance should be inserted later Abstract This paper presents some numerical evidence of unusual dynamics and hidden chaotic attractors of the Rabinovich-Fabrikant system, with some insightful descriptions and discussions. From a generalized Hamiltonian energy perspective, the attractors could be analyzed in more details. Keywords Rabinovich-Fabrikant system · Hidden chaotic attractor · Self-excited attractor · Hamiltonian energy 1 Introduction The Rabinovich-Fabrikant (RF) system, introduced by Rabinovich and Fabrikant [1] and numerically investigated in [2], was initially established as a physical model describing the stochasticity arising from the modulation instability in a non- equilibrium dissipative medium. However, recently in [2] we revealed that besides the physical properties described in [1], the system presents extremely rich com- plex dynamics. More significantly, unlike other familiar chaotic systems containing only second-order nonlinearities (such as the Lorenz system), the RF system with third-order nonlinearities presents some unusual dynamics, namely, some complex dynamics that were rarely or never seen from other systems in the past, such as \virtual" saddles in addition to several chaotic attractors with different shapes as well as hidden chaotic attractors and hidden transient chaotic attractors [3]. In fact, common interest in this system is continuously increasing (see e.g. [4{11]). Marius-F. Danca Dept. of Mathematics and Computer Science, Avram Iancu University of Cluj-Napoca, Ro- mania and Romanian Institute of Science and Technology, Cluj-Napoca, Romania Nikolay Kuznetsov Dept. -

Hidden Chaotic Attractors in a Class of Two-Dimensional Maps
ORE Open Research Exeter TITLE Hidden chaotic attractors in a class of two-dimensional maps AUTHORS Jiang, H; Liu, Y; Wei, Z; et al. JOURNAL Nonlinear Dynamics DEPOSITED IN ORE 11 October 2016 This version available at http://hdl.handle.net/10871/23849 COPYRIGHT AND REUSE Open Research Exeter makes this work available in accordance with publisher policies. A NOTE ON VERSIONS The version presented here may differ from the published version. If citing, you are advised to consult the published version for pagination, volume/issue and date of publication Hidden chaotic attractors in a class of two-dimensional maps∗ Haibo Jiangay, Yang Liub, Zhouchao Weic, Liping Zhanga a School of Mathematics and Statistics, Yancheng Teachers University, Yancheng 224002, China bSchool of Engineering, Robert Gordon University, Garthdee Road, Aberdeen AB10 7GJ, UK cSchool of Mathematics and Physics, China University of Geosciences, Wuhan 430074, China Abstract This paper studies the hidden dynamics of a class of two-dimensional maps inspired by the H´enonmap. A special consideration is made to the existence of fixed points and their stabilities in these maps. Our concern focuses on three typical scenarios which may generate hidden dynamics, i.e. no fixed point, single fixed point, and two fixed points. A computer search program is employed to explore the strange hidden attractors in the map. Our findings show that the basins of some hidden attractors are tiny, so the standard computational procedure for localization is unavailable. The schematic exploring method proposed in this paper could be generalized for investigating hidden dynamics of high-dimensional maps. Keywords: hidden dynamics; two-dimensional maps; fixed point; stability; coexistence. -

Hidden Periodic and Chaotic Oscillations in Nonlinear Dynamical
Preprints of the 19th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 24-29, 2014 Hidden attractors in dynamical systems: systems with no equilibria, multistability and coexisting attractors N.V. Kuznetsov, G.A. Leonov Department of Applied Cybernetics, Saint-Petersburg State University, Russia Department of Mathematical Information Technology, University of Jyv¨askyl¨a,Finland (e-mail: [email protected]) Abstract: From a computational point of view it is natural to suggest the classification of attractors, based on the simplicity of finding basin of attraction in the phase space: an attractor is called a hidden attractor if its basin of attraction does not intersect with small neighborhoods of equilibria, otherwise it is called a self-excited attractor. Self-excited attractors can be localized numerically by the standard computational procedure, in which after a transient process a trajectory, started from a point of unstable manifold in a neighborhood of unstable equilibrium, is attracted to the state of oscillation and traces it. Thus one can determine unstable equilibria and check the existence of self-excited attractors. In contrast, for the numerical localization of hidden attractors it is necessary to develop special analytical-numerical procedures in which an initial point can be chosen from the basin of attraction analytically. For example, hidden attractors are attractors in the systems with no-equilibria or with the only stable equilibrium (a special case of multistability and coexistence of attractors); hidden attractors arise in the study of well-known fundamental problems such as 16th Hilbert problem, Aizerman and Kalman conjectures, and in applied research of Chua circuits, phase-locked loop based circuits, aircraft control systems, and others. -

Hidden Oscillations in Dynamical Systems
Recent Researches in System Science Hidden oscillations in dynamical systems G.A. LEONOV a, N.V. KUZNETSOV b,a, S.M. SELEDZHI a aSt.Petersburg State University, Universitetsky pr. 28, St.Petersburg, 198504, RUSSIA bUniversity of Jyv¨askyl¨a, P.O. Box 35 (Agora), FIN-40014, FINLAND [email protected], [email protected], [email protected] Abstract :- The classical attractors of Lorenz, Rossler, Chua, Chen, and other widely-known attractors are those excited from unstable equilibria. From computational point of view this allows one to use numerical method, in which after transient process a trajectory, started from a point of unstable manifold in the neighborhood of equilibrium, reaches an attractor and identifies it. However there are attractors of another type: hidden attractors, a basin of attraction of which does not contain neighborhoods of equilibria. Study of hidden oscillations and attractors requires the development of new analytical and numerical methods which will be considered in this invited lecture. Key-Words:- Hidden oscillation, attractor localization, hidden attractor, harmonic balance, describing func- tion method, Aizerman conjecture, Kalaman conjecture, Hilbert 16th problem 1 Introduction 5 In establishing and developing the theory of non- 4 linear oscillations in the first half of the twentieth cen- tury [1, 2, 3, 4] most attention was given to analyzing 3 and synthesizing oscillatory systems for which solving 2 the problem of the existence of the oscillation modes did not present any great difficulties. The structure 1 of many mechanical, electromechanical and electronic y 0 systems was such that there were oscillation modes in them, the existence of which was almost obvious −1 — oscillations are excited from unstable equilibria. -
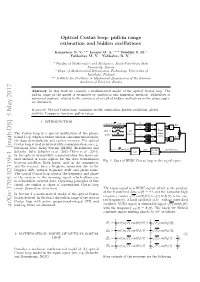
Optical Costas Loop: Pull-In Range Estimation and Hidden Oscillations
Optical Costas loop: pull-in range estimation and hidden oscillations Kuznetsov N. V. ∗;∗∗ Leonov G. A. ∗;∗∗∗ Seledzhi S. M. ∗ Yuldashev M. V. ∗ Yuldashev R. V. ∗ ∗ Faculty of Mathematics and Mechanics, Saint-Petersburg State University, Russia ∗∗ Dept. of Mathematical Information Technology, University of Jyv¨askyl¨a,Finland ∗∗∗ Institute for Problems in Mechanical Engineering of the Russian Academy of Sciences, Russia Abstract: In this work we consider a mathematical model of the optical Costas loop. The pull-in range of the model is estimated by analytical and numerical methods. Difficulties of numerical analysis, related to the existence of so-called hidden oscillations in the phase space, are discussed. Keywords: Optical Costas loop, nonlinear model, simulation, hidden oscillation, global stability, Lyapunov function, pull-in range. 1. INTRODUCTION I1 E1 s1(t)=m(t)√P1sin(θ1(t)) II(t) I E 2 + = 2 data ±1 90o Trans. The Costas loop is a special mdification of the phase- I Ampl. carrier Hybrid E 3 locked loop, which is widely used in telecommunication for 3 (TIA) I (t) I Q E 4 + the data demodulation and carrier recovery. The optical 4 Costas loop is used in intersatellite communication, see e.g. European Data Relay System (EDRS) [Rosenkranz and s (t) = √P sin(θ (t)) 2 2 2 g(t) Loop φ(t)=II(t)IQ(t) Schaefer, 2016; Schaefer et al., 2015; Heine et al., 2014]. LO Filter In the optical intersatellite communication the lasers are used instead of radio signals for the data transmission Fig. 1. Optical BPSK Costas loop in the signal space between satellites.