Calculation of Two Types of Quaternion Step Derivatives of Elementary Functions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Introduction Into Quaternions for Spacecraft Attitude Representation
Introduction into quaternions for spacecraft attitude representation Dipl. -Ing. Karsten Groÿekatthöfer, Dr. -Ing. Zizung Yoon Technical University of Berlin Department of Astronautics and Aeronautics Berlin, Germany May 31, 2012 Abstract The purpose of this paper is to provide a straight-forward and practical introduction to quaternion operation and calculation for rigid-body attitude representation. Therefore the basic quaternion denition as well as transformation rules and conversion rules to or from other attitude representation parameters are summarized. The quaternion computation rules are supported by practical examples to make each step comprehensible. 1 Introduction Quaternions are widely used as attitude represenation parameter of rigid bodies such as space- crafts. This is due to the fact that quaternion inherently come along with some advantages such as no singularity and computationally less intense compared to other attitude parameters such as Euler angles or a direction cosine matrix. Mainly, quaternions are used to • Parameterize a spacecraft's attitude with respect to reference coordinate system, • Propagate the attitude from one moment to the next by integrating the spacecraft equa- tions of motion, • Perform a coordinate transformation: e.g. calculate a vector in body xed frame from a (by measurement) known vector in inertial frame. However, dierent references use several notations and rules to represent and handle attitude in terms of quaternions, which might be confusing for newcomers [5], [4]. Therefore this article gives a straight-forward and clearly notated introduction into the subject of quaternions for attitude representation. The attitude of a spacecraft is its rotational orientation in space relative to a dened reference coordinate system. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

How to Enter Answers in Webwork
Introduction to WeBWorK 1 How to Enter Answers in WeBWorK Addition + a+b gives ab Subtraction - a-b gives ab Multiplication * a*b gives ab Multiplication may also be indicated by a space or juxtaposition, such as 2x, 2 x, 2*x, or 2(x+y). Division / a a/b gives b Exponents ^ or ** a^b gives ab as does a**b Parentheses, brackets, etc (...), [...], {...} Syntax for entering expressions Be careful entering expressions just as you would be careful entering expressions in a calculator. Sometimes using the * symbol to indicate multiplication makes things easier to read. For example (1+2)*(3+4) and (1+2)(3+4) are both valid. So are 3*4 and 3 4 (3 space 4, not 34) but using an explicit multiplication symbol makes things clearer. Use parentheses (), brackets [], and curly braces {} to make your meaning clear. Do not enter 2/4+5 (which is 5 ½ ) when you really want 2/(4+5) (which is 2/9). Do not enter 2/3*4 (which is 8/3) when you really want 2/(3*4) (which is 2/12). Entering big quotients with square brackets, e.g. [1+2+3+4]/[5+6+7+8], is a good practice. Be careful when entering functions. It is always good practice to use parentheses when entering functions. Write sin(t) instead of sint or sin t. WeBWorK has been programmed to accept sin t or even sint to mean sin(t). But sin 2t is really sin(2)t, i.e. (sin(2))*t. Be careful. Be careful entering powers of trigonometric, and other, functions. -

Calculus Formulas and Theorems
Formulas and Theorems for Reference I. Tbigonometric Formulas l. sin2d+c,cis2d:1 sec2d l*cot20:<:sc:20 +.I sin(-d) : -sitt0 t,rs(-//) = t r1sl/ : -tallH 7. sin(A* B) :sitrAcosB*silBcosA 8. : siri A cos B - siu B <:os,;l 9. cos(A+ B) - cos,4cos B - siuA siriB 10. cos(A- B) : cosA cosB + silrA sirrB 11. 2 sirrd t:osd 12. <'os20- coS2(i - siu20 : 2<'os2o - I - 1 - 2sin20 I 13. tan d : <.rft0 (:ost/ I 14. <:ol0 : sirrd tattH 1 15. (:OS I/ 1 16. cscd - ri" 6i /F tl r(. cos[I ^ -el : sitt d \l 18. -01 : COSA 215 216 Formulas and Theorems II. Differentiation Formulas !(r") - trr:"-1 Q,:I' ]tra-fg'+gf' gJ'-,f g' - * (i) ,l' ,I - (tt(.r))9'(.,') ,i;.[tyt.rt) l'' d, \ (sttt rrJ .* ('oqI' .7, tJ, \ . ./ stll lr dr. l('os J { 1a,,,t,:r) - .,' o.t "11'2 1(<,ot.r') - (,.(,2.r' Q:T rl , (sc'c:.r'J: sPl'.r tall 11 ,7, d, - (<:s<t.r,; - (ls(].]'(rot;.r fr("'),t -.'' ,1 - fr(u") o,'ltrc ,l ,, 1 ' tlll ri - (l.t' .f d,^ --: I -iAl'CSllLl'l t!.r' J1 - rz 1(Arcsi' r) : oT Il12 Formulas and Theorems 2I7 III. Integration Formulas 1. ,f "or:artC 2. [\0,-trrlrl *(' .t "r 3. [,' ,t.,: r^x| (' ,I 4. In' a,,: lL , ,' .l 111Q 5. In., a.r: .rhr.r' .r r (' ,l f 6. sirr.r d.r' - ( os.r'-t C ./ 7. /.,,.r' dr : sitr.i'| (' .t 8. tl:r:hr sec,rl+ C or ln Jccrsrl+ C ,f'r^rr f 9. -

Supplement 1: Toolkit Functions
Supplement 1: Toolkit Functions What is a Function? The natural world is full of relationships between quantities that change. When we see these relationships, it is natural for us to ask “If I know one quantity, can I then determine the other?” This establishes the idea of an input quantity, or independent variable, and a corresponding output quantity, or dependent variable. From this we get the notion of a functional relationship in which the output can be determined from the input. For some quantities, like height and age, there are certainly relationships between these quantities. Given a specific person and any age, it is easy enough to determine their height, but if we tried to reverse that relationship and determine age from a given height, that would be problematic, since most people maintain the same height for many years. Function Function: A rule for a relationship between an input, or independent, quantity and an output, or dependent, quantity in which each input value uniquely determines one output value. We say “the output is a function of the input.” Function Notation The notation output = f(input) defines a function named f. This would be read “output is f of input” Graphs as Functions Oftentimes a graph of a relationship can be used to define a function. By convention, graphs are typically created with the input quantity along the horizontal axis and the output quantity along the vertical. The most common graph has y on the vertical axis and x on the horizontal axis, and we say y is a function of x, or y = f(x) when the function is named f. -

Section 1.4 Absolute Value
Section 1.4 Absolute Value Geometric Definition of Absolute Value As we study the number line, we observe a very useful property called symmetry. The numbers are symmetrical with respect to the origin. That is, if we go four units to the right of 0, we come to the number 4. If we go four units to the lest of 0 we come to the opposite of 4 which is −4 The absolute value of a number a, denoted |a|, is the distance from a to 0 on the number line. Absolute value speaks to the question of "how far," and not "which way." The phrase how far implies length, and length is always a nonnegative (zero or positive) quantity. Thus, the absolute value of a number is a nonnegative number. This is shown in the following examples: Example 1 1 Algebraic Definition of Absolute Value The absolute value of a number a is aaif 0 | a | aaif 0 The algebraic definition takes into account the fact that the number a could be either positive or zero (≥0) or negative (<0) 1) If the number a is positive or zero (≥ 0), the first part of the definition applies. The first part of the definition tells us that if the number enclosed in the absolute bars is a nonnegative number, the absolute value of the number is the number itself. 2) If the number a is negative (< 0), the second part of the definition applies. The second part of the definition tells us that if the number enclosed within the absolute value bars is a negative number, the absolute value of the number is the opposite of the number. -

A Tutorial on Euler Angles and Quaternions
A Tutorial on Euler Angles and Quaternions Moti Ben-Ari Department of Science Teaching Weizmann Institute of Science http://www.weizmann.ac.il/sci-tea/benari/ Version 2.0.1 c 2014–17 by Moti Ben-Ari. This work is licensed under the Creative Commons Attribution-ShareAlike 3.0 Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/ by-sa/3.0/ or send a letter to Creative Commons, 444 Castro Street, Suite 900, Mountain View, California, 94041, USA. Chapter 1 Introduction You sitting in an airplane at night, watching a movie displayed on the screen attached to the seat in front of you. The airplane gently banks to the left. You may feel the slight acceleration, but you won’t see any change in the position of the movie screen. Both you and the screen are in the same frame of reference, so unless you stand up or make another move, the position and orientation of the screen relative to your position and orientation won’t change. The same is not true with respect to your position and orientation relative to the frame of reference of the earth. The airplane is moving forward at a very high speed and the bank changes your orientation with respect to the earth. The transformation of coordinates (position and orientation) from one frame of reference is a fundamental operation in several areas: flight control of aircraft and rockets, move- ment of manipulators in robotics, and computer graphics. This tutorial introduces the mathematics of rotations using two formalisms: (1) Euler angles are the angles of rotation of a three-dimensional coordinate frame. -

Calculus Online Textbook Chapter 2
Contents CHAPTER 1 Introduction to Calculus 1.1 Velocity and Distance 1.2 Calculus Without Limits 1.3 The Velocity at an Instant 1.4 Circular Motion 1.5 A Review of Trigonometry 1.6 A Thousand Points of Light 1.7 Computing in Calculus CHAPTER 2 Derivatives The Derivative of a Function Powers and Polynomials The Slope and the Tangent Line Derivative of the Sine and Cosine The Product and Quotient and Power Rules Limits Continuous Functions CHAPTER 3 Applications of the Derivative 3.1 Linear Approximation 3.2 Maximum and Minimum Problems 3.3 Second Derivatives: Minimum vs. Maximum 3.4 Graphs 3.5 Ellipses, Parabolas, and Hyperbolas 3.6 Iterations x, + ,= F(x,) 3.7 Newton's Method and Chaos 3.8 The Mean Value Theorem and l'H8pital's Rule CHAPTER 2 Derivatives 2.1 The Derivative of a Function This chapter begins with the definition of the derivative. Two examples were in Chapter 1. When the distance is t2, the velocity is 2t. When f(t) = sin t we found v(t)= cos t. The velocity is now called the derivative off (t). As we move to a more formal definition and new examples, we use new symbols f' and dfldt for the derivative. 2A At time t, the derivativef'(t)or df /dt or v(t) is fCt -t At) -f (0 f'(t)= lim (1) At+O At The ratio on the right is the average velocity over a short time At. The derivative, on the left side, is its limit as the step At (delta t) approaches zero. -

Doing Physics with Quaternions
Doing Physics with Quaternions Douglas B. Sweetser ©2005 doug <[email protected]> All righs reserved. 1 INDEX Introduction 2 What are Quaternions? 3 Unifying Two Views of Events 4 A Brief History of Quaternions Mathematics 6 Multiplying Quaternions the Easy Way 7 Scalars, Vectors, Tensors and All That 11 Inner and Outer Products of Quaternions 13 Quaternion Analysis 23 Topological Properties of Quaternions 28 Quaternion Algebra Tool Set Classical Mechanics 32 Newton’s Second Law 35 Oscillators and Waves 37 Four Tests of for a Conservative Force Special Relativity 40 Rotations and Dilations Create the Lorentz Group 43 An Alternative Algebra for Lorentz Boosts Electromagnetism 48 Classical Electrodynamics 51 Electromagnetic Field Gauges 53 The Maxwell Equations in the Light Gauge: QED? 56 The Lorentz Force 58 The Stress Tensor of the Electromagnetic Field Quantum Mechanics 62 A Complete Inner Product Space with Dirac’s Bracket Notation 67 Multiplying quaternions in Polar Coordinate Form 69 Commutators and the Uncertainty Principle 74 Unifying the Representations of Integral and Half−Integral Spin 79 Deriving A Quaternion Analog to the Schrödinger Equation 83 Introduction to Relativistic Quantum Mechanics 86 Time Reversal Transformations for Intervals Gravity 89 Unified Field Theory by Analogy 101 Einstein’s vision I: Classical unified field equations for gravity and electromagnetism using Riemannian quaternions 115 Einstein’s vision II: A unified force equation with constant velocity profile solutions 123 Strings and Quantum Gravity 127 Answering Prima Facie Questions in Quantum Gravity Using Quaternions 134 Length in Curved Spacetime 136 A New Idea for Metrics 138 The Gravitational Redshift 140 A Brief Summary of Important Laws in Physics Written as Quaternions 155 Conclusions 2 What Are Quaternions? Quaternions are numbers like the real numbers: they can be added, subtracted, multiplied, and divided. -

Vector Analysis
Fachhochschule Frankfurt am Main Fachbereich Informatik und Ingenieurwissenschaften Studiengang Elektrotechnik Vector Analysis Prof. Dr.-Ing. G. Zimmer 2 0 −2 8 8 6 6 4 4 2 2 0 0 −2 −2 −4 −6 −4 −8 −6 Contents 1 The geometry of euclidean space 1 1.1 Vectorsinthree-dimensionalspace . .. 1 1.1.1 Simplevectoroperations . 2 1.1.2 Theinnerproduct........................ 4 1.1.3 Thecrossproduct........................ 5 1.2 n-DimensionalEuclidianspace . 7 1.3 LinearmappinginEuclideanspace. 8 2 Differentiation 9 2.1 Visualizationofreal-valuedfunctions . .... 9 2.2 Limitsandcontinuity . .... .... .... ... .... .... .. 12 2.3 Differentiationoffunctions . 14 2.4 Gradientsanddirectionalderivate . .. 18 3 Vector-valued functions 20 3.1 Paths................................... 20 3.2 Arclength................................ 22 3.2.1 Naturalparametrization . 22 3.3 Differentialgeometryofapath . 23 3.4 Arbitraryorthogonalcoordinates . .. 24 3.4.1 Cylindricalcoordinates. 24 3.4.2 Sphericalcoordinates. 28 3.4.3 Orthogonalcoordinates. 30 3.4.4 Nabla operator of an arbitrary orthogonal coordinate system . 31 3.5 Surfaces................................. 32 3.5.1 Tangentvectorstothesurface . 34 3.5.2 Areaofasurfaces........................ 34 4 Integrals over Paths and Surfaces 36 4.1 Thepathintegral ............................ 36 4.1.1 Potential function of charge distribution along a filament ... 37 4.1.2 Static electric field of a charge distribution along a filament. 38 4.1.3 Thelineintegral ........................ 38 4.1.4 Staticmagneticfieldduetoacurrentfilament -
Canvas Formula Quiz Question Helper Functions Canvas Requires Users to Manually Input Formulas When Creating Formula Quiz Ques
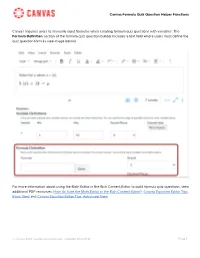
Canvas Formula Quiz Question Helper Functions Canvas requires users to manually input formulas when creating formula quiz questions with variables. The Formula Definition section of the formula quiz question builder includes a text field where users must define the quiz question formula (see image below). For more information about using the Math Editor in the Rich Content Editor to build formula quiz questions, view additional PDF resources: How do I use the Math Editor in the Rich Content Editor?, Canvas Equation Editor Tips: Basic View and Canvas Equation Editor Tips: Advanced View. © Canvas 2021 | guides.canvaslms.com | updated 2021-01-16 Page 1 Canvas Formula Quiz Question Helper Functions Helper Functions Use the helper functions listed below to build formulas in the Formula Definition section of the Formula question quiz question creator. Notes: ● All functions accept only numeric parameters. ● All trigonometric function calculations are performed in radians. To convert to or from degrees, use the deg_to_rad( ) or rad_to_deg( ) functions. ● The Formula Definition text field does not designate definable variables with square brackets. ● Variables must start with a letter and may be followed by any combination of letters and numbers. Keep in mind that variable names are case sensitive and characters other than letters and numbers are not recognized. ● In the Formula Definition text field, Canvas translates the entry of the letter “e” as the constant e. ● Helper functions can be nested. For an example of nested helper functions, see the entry for At in the table below. ● Several functions operate on a list of numbers. Unless otherwise noted, the list parameter is defined with a comma-separated list of values or with a nested reverse( ) or sort( ) function. -

Normed Vector Spaces
Normed vector spaces A normed vector space is a vector space where each vector is associated with a “length”. In the 2 or 3 dimensional Euclidean vector space, this notion is intuitive: the norm of a vector can simply be defined to be the length of the arrow. However, the concept of a norm generalizes this idea of the length of an arrow vector. Moreover, the norm of a vector changes when we multiply a vector by a scalar. Thus, a norm implements our intuition that scaling a vector changes its length. Definition 1 More rigorously, a normed vector space is a tuple (V; F ; k:k) where V is a vector space, F is a field, and k:k is a function called the norm that maps vectors to strictly positive lengths: k:k : V! [0; 1) . The norm function must satisfy the following conditions: 1. 8v 2 V kvk ≥ 0 2. kαxk = jαj kxk 3. kx + yk ≤ kxk + kyk Below we outline the intuitive reasoning behind each aspect of the definition of a norm: 1. says that all vectors should have a positive length. This enforces our intuition that a “length” is a positive quantity. 2. says that if we multiply a vector by a scalar, it’s length should increase by the magnitude (i.e. the absolute) value of that scalar. This axiom ties together the notion of scaling vectors (Axiom 6 in the definition of a vector space) and the norm of a vector. 3. says that the length of the sum of two vectors should not exceed the sum of the lengths of each vector.