Optimal Redesign of the Dutch Road Network
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Recreatief Uitloopgebied Emmeloord -, ~ Van Corridor Naar Well in Houdsopgave
Recreatief uitloopgebied Emmeloord -, ~ Van Corridor naar Well In houdsopgave 1. Inleiding aanleiding leeswijzer Wellerwaard en Corridor 2. Nut en noodzaak recreatief uitloopgebied en wonen Recreatie Wonen Conclusie 3. Probleem- en doelstelling recreatief uitloopgebied Aigemeen Probleemstelling Doelstelling Samenhang projecten Corridor Conclusie 4. Landschap referentiesituatie Aigemeen Belvedere en UNESCO Referentiesituatie landschap Corridor Visualisatie en conclusie 5. Visievorming Corridor Aigemeen Conclusie 6. Historie planvorming Planvorming 1992 - 2005 Planvorming 2005 - 2010 Van Structuurvisie naar ontwerp van Ontwerp naar Inpassing Geraadpleegde literatuur Bijlagen I. Brochure Ontwerp Ontwikkelingsvisie, Corridor Emmeloord - Kuinderbos II. Visualisaties III. Wellerwaard, grenzeloos wonen, visie schetsontwerp 1. Inleiding Aanleiding In juni 2010 is het bestemmingsplan Wellerwaard en het Milieueffectrapport (MER) Wellerwaard afgerond. Met ingang van 16 september 2010 heeft een ieder voor een periode van zes weken kunnen reageren op deze documenten opgesteld. Uit de verschillende reacties die gemeente heeft ontvangen is geconstateerd dat in de documenten onvoldoende ingegaan is op de landschappelijke of cultuurhistorische kernkwaliteiten van de Corridor. Ook ontbreekt een omschrijving van de waarden van het oorspronkelijke landschapsontwerp en de waarden daarvan. Daardoor is het lastig om de voorgestelde ontwikkelingen goed te beoordelen en om te kunnen bepalen of en zoja, welke waarden mogelijk worden aangetast. In dit document wordt ingegaan op de landschappelijke en cultuurhistorische kernkwaliteiten van de Corridor. Het biedt daarmee beter inzicht in de referentiesituatie van het landschap in de Corridor. Ook de planvorming die in de loop der jaren heeft plaatsgevonden voor de Corridor, is meer inzichtelijk gemaakt, waardoor de keuzes die gemaakt zijn voor de inrichting van het gebied beter verklaarbaar zijn. Leeswijzer Gezocht is naar een logische opbouw voor deze aanvulling. -

TU1206 COST Sub-Urban WG1 Report I
Sub-Urban COST is supported by the EU Framework Programme Horizon 2020 Rotterdam TU1206-WG1-013 TU1206 COST Sub-Urban WG1 Report I. van Campenhout, K de Vette, J. Schokker & M van der Meulen Sub-Urban COST is supported by the EU Framework Programme Horizon 2020 COST TU1206 Sub-Urban Report TU1206-WG1-013 Published March 2016 Authors: I. van Campenhout, K de Vette, J. Schokker & M van der Meulen Editors: Ola M. Sæther and Achim A. Beylich (NGU) Layout: Guri V. Ganerød (NGU) COST (European Cooperation in Science and Technology) is a pan-European intergovernmental framework. Its mission is to enable break-through scientific and technological developments leading to new concepts and products and thereby contribute to strengthening Europe’s research and innovation capacities. It allows researchers, engineers and scholars to jointly develop their own ideas and take new initiatives across all fields of science and technology, while promoting multi- and interdisciplinary approaches. COST aims at fostering a better integration of less research intensive countries to the knowledge hubs of the European Research Area. The COST Association, an International not-for-profit Association under Belgian Law, integrates all management, governing and administrative functions necessary for the operation of the framework. The COST Association has currently 36 Member Countries. www.cost.eu www.sub-urban.eu www.cost.eu Rotterdam between Cables and Carboniferous City development and its subsurface 04-07-2016 Contents 1. Introduction ...............................................................................................................................5 -
Introduction Day To
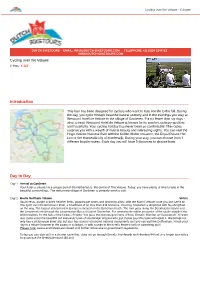
Cycling over the Veluwe - 6 dagen DUTCH BIKETOURS - EMAIL: [email protected] - TELEPHONE +31 (0)24 3244712 - WWW.DUTCH-BIKETOURS.COM Cycling over the Veluwe 6 days, € 410 Introduction This tour has been designed for cyclists who want to truly live life to the full. During the day, you cycle through beautiful natural scenery and in the evenings you stay at Westcord Hotel de Veluwe in the village of Garderen. For no fewer than six days - what a treat! Westcord Hotel de Veluwe is known for its comfort, culinary qualities and hospitality. Your cycling holiday has never been so comfortable! The routes surprise you with a wealth of natural beauty and interesting sights. You can visit the Hoge Veluwe National Park with the Kröller-Muller museum, the Royal Palace Het Loo or the Hanseatic city of Harderwijk. During your stay, you can choose from 4 different bicycle routes. Each day you will have 3 distances to choose from. Day to Day Day 1 Arrival at Garderen Your hotel is situated in a unique part of the Netherlands: the centre of The Veluwe. Today, you have plenty of time to take in the beautiful surroundings. The welcoming village of Garderen is certainly worth a visit. Day 2 Route Northern Veluwe 56 km Vast forests, purple-colored heather fields, picturesque towns and charming cities: with the Noord Veluwe route you can see it all. You cycle over the Ermelose Heide, a heathland of no less than 343 hectares. You may encounter a shepherd with his sheepfold on the way. The largest sheep herd in Europe is located on the Ermelose heath. -

Road Infrastructure Cost and Revenue in Europe (April 2008)
CECE Delft Delft SolutionsSolutions for for environment,environment, economyeconomy and and technology technology Oude Delft 180 Oude Delft 180 2611 HH Delft 2611The HH Netherlands Delft tel:The +31 Netherlands 15 2 150 150 tel: fax:+31 +31 15 2150 15 2 150 151 e-mail: [email protected] fax: +31 15 2150 151 website: www.ce.nl e-mail: [email protected] KvK 27251086 website: www.ce.nl KvK 27251086 Road infrastructure cost and revenue in Europe Produced within the study Internalisation Measures and Policies for all external cost of Transport (IMPACT) – Deliverable 2 Version 1.0 Report Karlsruhe/Delft, April 2008 Authors: Claus Doll (Fraunhofer-ISI) Huib van Essen (CE Delft) Publication Data Bibliographical data: Road infrastructure cost and revenue in Europe Produced within the study Internalisation Measures and Policies for all external cost of Transport (IMPACT) – Deliverable 2 Delft, CE, 2008 Transport / Infrastructure / Roads / EC / Costs / Policy / Taxes / Charges / Pricing / International / Regional Publication number: 08.4288.17 CE-publications are available from www.ce.nl Commissioned by: European Commission DG TREN. Further information on this study can be obtained from the contact Huib van Essen. © copyright, CE, Delft CE Delft Solutions for environment, economy and technology CE Delft is an independent research and consultancy organisation specialised in developing structural and innovative solutions to environmental problems. CE Delfts solutions are characterised in being politically feasible, technologically sound, economically prudent and socially -

Map of the European Inland Waterway Network – Carte Du Réseau Européen Des Voies Navigables – Карта Европейской Сети Внутренних Водных Путей
Map of the European Inland Waterway Network – Carte du réseau européen des voies navigables – Карта европейской сети внутренних водных путей Emden Berlin-Spandauer Schiahrtskanal 1 Берлин-Шпандауэр шиффартс канал 5.17 Delfzijl Эмден 2.50 Arkhangelsk Делфзейл Архангельск Untere Havel Wasserstraße 2 Унтере Хафель водный путь r e Teltowkanal 3 Тельтов-канал 4.25 d - O Leeuwarden 4.50 2.00 Леуварден Potsdamer Havel 4 Потсдамер Хафель 6.80 Groningen Harlingen Гронинген Харлинген 3.20 - 5.45 5.29-8.49 1.50 2.75 р водный п 1.40 -Оде . Papenburg 4.50 El ель r Wasserstr. Kemi Папенбург 2.50 be аф Ode 4.25 нканал Х vel- Кеми те Ha 2.50 юс 4.25 Luleå Belomorsk K. К Den Helder Küsten 1.65 4.54 Лулео Беломорск Хелдер 7.30 3.00 IV 1.60 3.20 1.80 E m О - S s Havel K. 3.60 eve Solikamsk д rn a е ja NE T HERLANDS Э р D Соликамск м Хафель-К. vin с a ная Б Север Дви 1 III Berlin е на 2 4.50 л IV B 5.00 1.90 о N O R T H S E A Meppel Берлин e м 3.25 l 11.00 Меппел o о - 3.50 m р 1.30 IV О с а 2 2 де - o к 4.30 р- прее во r 5.00 б Ш дн s о 5.00 3.50 ь 2.00 Sp ый k -Б 3.00 3.25 4.00 л ree- er Was п o а Э IV 3 Od ser . -

Fact Sheet New Type of Layout for 60 Km/H Rural Roads
SWOV Fact sheet Edge strips on rural access roads Summary In a sustainably safe traffic system, uniformity of traffic facilities is a point of special interest. Uniformity ensures recognizability and predictability of (critical) traffic situations. The uniformity of rural access roads can be increased by applying edge strips on both sides of the road; this creates a narrow single lane for motorised vehicles in the middle of the carriageway: a marked driving lane. Edge strips are marked with broken lines. The edge strips on either side of the marked driving lane can be used by cyclists if they are sufficiently wide. Studies indicate that this type of marking slightly increases road safety. Background and content When redesigning rural roads according to the Sustainable Safety guidelines, 80 km/h roads with a minor traffic function in rural residential areas are converted into rural access roads. This road category is intended for use by all transport modes and has a speed limit of 60 km/h. In a sustainably safe traffic system, uniformity of traffic facilities is a point of special interest. Uniformity is a way of ensuring recognizability and predictability of (critical) traffic situations (see also the SWOV Fact sheet Recognizable road design). The uniformity of rural access roads can be increased by applying edge strips; this leaves a marked driving lane for motorized vehicles in the middle of the carriageway (see Figure 1). The present Fact sheet will discuss the requirements for the different types of edge strips on rural access road and the effects on traffic behaviour and road safety. -
SMART MOBILITY #Smarttogether
SMART MOBILITY #SmartTogether Get to know the Smart Mobility opportunities in the Netherlands The Dutch Way Photo: TNO The Netherlands: a small country with great potential Smart Mobility is a theme of global proportions. Half of the world population lives in megacities and this share increases every year. In all densely populated metropolitan areas, mobility, in logical tandem with the quality of life, is one of the most important issues in today’s society. Throughout the world, Smart Mobility is the object of turbulent development. In Europe, the topic has been high on the innovation agenda for many years, and the European Commission provides incentives for research and development and application projects. The Netherlands off ers (international) entrepreneurs who develop Smart Mobility initiatives a unique business and innovation climate. The Netherlands is a densely populated transport hub with an infrastructure and an innovation climate that rank among the best of the world. The Netherlands has an extensive, high-quality road system in urban areas. In addition, the Netherlands is the home turf of a number of prestigious knowledge clusters in the automotive, technology and high-tech industry. Furthermore, the Netherlands is characterized by a culture of open networks and intensive cooperation, and has the highest percentage of mobile Internet users in the world. The Netherlands means business when it comes to Smart Mobility; not just to promote domestic development, but to take the lead in developing pioneering initiatives. 2 #SmartTogether The Netherlands as a Living Lab: develop and test in practice! The Netherlands means business when it comes to Smart Mobility. -

Economische Perspectieven Voor Rotterdam the Hague Airport
Economische perspectieven voor Rotterdam The Hague Airport Onderzoek in opdracht van de Gemeente Rotterdam Februari 2014 Erasmus University Rotterdam RHV Dr. Michiel Nijdam Dr. Alexander Otgaar 1 Inhoudsopgave Inhoudsopgave ........................................................................................................................... 2 1. Inleiding .................................................................................................................................. 3 Aanleiding .......................................................................................................................................... 3 Probleemstelling en onderzoeksvragen ............................................................................................ 3 Methode en leeswijzer ...................................................................................................................... 4 2. De economische bijdrage van de luchthaven ........................................................................ 5 Het aantal passagiers ......................................................................................................................... 5 Directe arbeidsplaatsen ..................................................................................................................... 6 Indirecte arbeidsplaatsen .................................................................................................................. 7 Afgeleide arbeidsplaatsen ................................................................................................................ -

02. Rondje Bant
maart - april 2020 RONDJE BANT tweemaandelijks blad voor binnen- en buiten Bant Leren met plezier! De Wending is een samenwerkingsschool met onderwijs vol energie, passie en plezier! We gaan met passie de uitdaging aan om ook uw kind een fijne bassisschoolperiode te geven. Leren met plezier! Cecile de Wit Is uw kind bijna 4 en mag u een schoolkeuze maken? medisch pedicure & manicure We leiden u graag rond en geven u vrijblijvend informatie over onze samenwerkingsschool. SWS De Wending Voor openbaar en katholiek onderwijs 0527 261447 [email protected] professionaliteit, kwaliteit en persoonlijke aandacht Wellerzandweg 7 | Bant | 06 - 17 99 87 45 | www.cwvoetzorg.nl goedkoop en snel, kies spuitmiddel.nl www.spuitmiddel.nl Levering door heel Nederland Wim Groothedde - Buitenom 15 - 8314 AM - Bant Telefoon: 0527-240388/ Mobiel: 06-2338 4033 www.grova.nl E-mail: [email protected] Vraag prijzen op via email: [email protected] Bestel snel of bel ons: via Whatsapp! Bert de Bruijckere 06 54794636 • Ivo de Wit 06 11587575 Askold Vonk 06 30400608 • Thomas Jongsma 06 23605491 Colofon Kopij Rondje Bant Tweemaandelijks blad voor Bantenaren Beste Bantenaren, 27e jaargang - 2020 Stuur uw kopij voor het volgende Rondje Hoofd- en eindredactie: Bant (mei/ juni 2020) uiterlijk 10 Els Haartsen april 2020 per e-mail met bijlage in Word naar: [email protected] Advertenties, financiën en voorkant: Hanneke Vos-Bootsma Wilt u automatisch herinnerd worden aan Opmaak: de inleverdatum en heeft u tot nu toe nog Bettine Veldhuisen, Roxana Troost en geen herinneringsmail ontvangen, stuur Femke Brouwer dan even een mail naar rondje Bant: [email protected] o.v.v. -

Espel En Mail Dan Naar Verschijnt Vijf-Zes Keer Per Jaar
Wilt u voor het verschijnen Colofon van de dorpskrant een 2020 reminder via de email ontvangen? Mrt-April-Mei Op de Wieken is de dorpskrant van Espel en Mail dan naar verschijnt vijf-zes keer per jaar. De krant wordt in [email protected] en rondom Espel gratis verspreid. Iedereen mag kopij inleveren! De redactie behoudt het recht om ingezonden stukken in te Van de redactie korten of niet te plaatsen zonder opgaaf van redenen. Iedereen weer bedankt voor het aanleveren van de kopij! Nieuwsberichten: Heleen den Dekker De krant is samengesteld door Heleen den Bosrand 6 Dekker die vanaf nu de taken van Marjan T 06 11474799 E [email protected] Holtland zal overnemen. We willen Marjan hartelijk danken voor alle werkzaamheden Familieberichten: aan de dorpskrant! Annelies Menting- Omtzigt Espelerpad 8 De krant staat weer boordevol leuke 06 12088358 [email protected] T E activiteiten en nieuws. Bij deze wenst de Financiën en Advertenties: redactie u veel leesplezier toe. Alice Ziel Zuiderrand 9 Bij deze wenst de redactie u veel leesplezier T 270031 E [email protected] toe. Door het Coronavirus verschijnt de krant eerst digitaal en later op papier. Helaas Interviews: zijn er voor het verschijnen al een aantal Leo Boot aankondigingen geannuleerd. Willy Heukers-ten Bosch Marjan Holtland Drukker: Alice Ziel Dhr. van Dijk – Landhuisdrukkerij Annelies Menting – Omtzigt Onderduikerspad 5 Heleen den Dekker T 271434 E [email protected] Oplage: 680 Dorpsagenda Verspreiding van deze uitgave: 26 mrt Bijeenkomst Polderpad geannuleerd IJsclub 15 april ESVRA Lach workshop 13 mei Gebruikersavond MFC Advertentie tarieven: 21 mei DAUWTRAPPEN (hemelvaart) Zwart-wit: 6x per jaar eenmalig 1 hele pagina € 155,- € 45,- ½ pagina € 88,- € 25,- ⅓ pagina € 66,- € 20,- ⅙ pagina € 50,- € 15,- Meer info over bovenstaande activiteiten vindt Nieuwe dorpskrant data: u elders in deze Dorpskrant. -

Bekerloting Senioren B-Categorie
Koninklijke Nederlandse Voetbalbond Steunpunt Zwolle Bekerloting Senioren B-categorie Speeldatum 14-15 november ZATERDAG groep 1 Thuis team Gast team Heerenveen 3 - IJVC 2 VCR 2 - Winnaar VC Trynwalden 2 - Kollum 3 Rottevalle 2 - Kootstertille SC 2 Amicitia VMC 4 - Stadspark 4 Knickerbockers The 15 - GVAV-Rapiditas 2 Oranje Nassau 4 - Potetos 4 S.C. Stiens 3 - Foarut 2 KRC 1 - Mamio 3 Drachten 2 - Opende 2 Velocitas 1897 4 - Oranje Nassau 5 Urk 5 - Ens 2 Stadspark 3 - Wildervank 2 S.V. Haulerwijk 2 - ODV 2 ACV 4 - Be Quick 1887 3 Sweach De 2 - Drachtster Boys 5 Wykels Hallum 3 - Leeuwarder Zwaluwen 5 Grootegast Fc. 3 - SV Bedum 5 Knickerbockers The 10 - Amicitia VMC 3 Franeker SC 3 - Leovardia 4 Zuidhorn 4 - Oranje Nassau 3 Fean '58 3 - Harkemase Boys 4 Aduard 2000 2 - Knickerbockers The 11 Tollebeek 2 - Urk 4 DZOH 4 - Sleen 2 Olde Veste'54 4 - Staphorst 7 Knickerbockers The 14 - VVK 3 HZVV 5 - ACV 5 LTC 3 - Roden 2 za. Ternaard 2 - Tzum 1 Borger 2 - LTC 4 Workum 3 - Heerenveense Boys 8 ACV 6 - Glimmen 2 Staphorst 5 - HZVV 4 HZVV 3 - DZOH 5 Wildervank 3 - Veendam 1894 3 Anjum 2 - vrijgeloot ZATERDAG Groep 2 Thuis team Gast team EBC 1 - ONS Sneek 3 Flevo Boys 5 - Staphorst 8 Olde Veste'54 5 - Flevo Boys 6 Rouveen SC 4 - Wolvega FC 4 SC Bolsward 4 - Oudehaske 3 Hardegarijp 4 - Leovardia 5 Blauw Wit '34 8 - Dronrijp 2 Weide De 4 - ZZVV 3 Anjum 3 - Broekster Boys 3 Nagele 2 - Wolvega FC 3 Be Quick D 4 - Buitenpost 5 Scharnegoutum'70 4 - VVI 4 RWF 3 - Twijzel SC 3 Holwerd 2 - Kollum 4 HZVV 6 - Sweel 2 Grijpskerk 4 - OKVC 2 Rood Zwart Baflo 2 - Grijpskerk 5 Harkema Opeinde 3 - Eastermar 2 SV Bedum 6 - Stadspark 6 Amicitia VMC 6 - Oosterparkers 3 NEC Delfzijl 4 - Lycurgus 9 SV Bedum 7 - Middelstum 3 BATO 2 - ST Veelerveen/Westerwolde 2 Leeuwarder Zwaluwen 7 - Franeker SC 4 Ouwe Syl 2 - Winnaar Frisia 3 - Wardy 2 Achilles 1894 5 - ONR 5 DVC Appingedam 3 - Amicitia VMC 5 Actief 2 - ACV 8 Gorecht 5 - Oosterparkers 2 NKVV 2 - HZVV 7 LEO 6 - Winnaar Emmen 2 - Asser Boys 2 FC Burgum 4 - RWF 4 S.F. -
Centenary of the Zuiderzee Act: a Masterpiece of Engineering
NEWS Centenary of the Zuiderzee Act: a Masterpiece of Engineering The Dutch Zuiderzee Act came into force exactly 100 years ago today, on 14 June 1918. The Zuiderzee Act signalled the beginning of the works that continue to protect the heart of The Netherlands from the dangers and vagaries of the Zuiderzee, an inlet of the North Sea, to this day. This amazing feat of engineering and spatial planning was a key milestone in The Netherlands’ world-leading reputation for reclaiming land from the sea. Wim van Wegen, content manager at ‘GIM International’, was born, raised and still lives in the Noordoostpolder, one of the various polders that were constructed. He has written an article about the uniqueness of this area of reclaimed land. I was born at the bottom of the sea. Want to fact-check this? Just compare a pre-1940s map of the Netherlands to a more contemporary one. The old map shows an inlet of the North Sea, the Zuiderzee. The new one reveals large parts of the Zuiderzee having been turned into land, actually no longer part of the North Sea. In 1932, a 32km-long dam (the Afsluitdijk) was completed, separating the former Zuiderzee and the North Sea. This part of the sea was turned into a lake, the IJsselmeer (also known as Lake IJssel or Lake Yssel in English). Why 'polder' is a Dutch word The idea behind the construction of the Afsluitdijk was to defend areas against flooding, caused by the force of the open sea. The dam is part of the Zuiderzee Works, a man-made system of dams and dikes, land reclamation and water drainage works.