APA Format 6Th Edition Template
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Moderated Mediation Analysis: a Review and Application to School Climate Research
Practical Assessment, Research, and Evaluation Volume 25 Article 5 2020 Moderated Mediation Analysis: A Review and Application to School Climate Research Kelly D. Edwards University of Virginia Timothy R. Konold University of Virginia Follow this and additional works at: https://scholarworks.umass.edu/pare Part of the Educational Assessment, Evaluation, and Research Commons, Educational Methods Commons, and the Social Statistics Commons Recommended Citation Edwards, Kelly D. and Konold, Timothy R. (2020) "Moderated Mediation Analysis: A Review and Application to School Climate Research," Practical Assessment, Research, and Evaluation: Vol. 25 , Article 5. Available at: https://scholarworks.umass.edu/pare/vol25/iss1/5 This Article is brought to you for free and open access by ScholarWorks@UMass Amherst. It has been accepted for inclusion in Practical Assessment, Research, and Evaluation by an authorized editor of ScholarWorks@UMass Amherst. For more information, please contact [email protected]. Moderated Mediation Analysis: A Review and Application to School Climate Research Cover Page Footnote We thank members of our research team including Dewey Cornell, Anna Grace Burnette, Brittany Zellers Crowley, Katrina Debnam, Francis Huang, Yuane Jia, Jennifer Maeng, and Shelby Stohlman. This project was supported by Grant #NIJ 2017-CK-BX-007 awarded by the National Institute of Justice, Office of Justice Programs, U.S. Department of Justice. Surveying was conducted in collaboration with the Center for School and Campus Safety at the Virginia Department of Criminal Justice Services. The opinions, findings, and conclusions or ecommendationsr expressed in this report are those of the authors and do not necessarily reflect those of the U.S. -

Mediation and Moderation Analyses with R
Mediation and Moderation Analyses with R Stephen D. Short Saturday, February 28, 2015 Stephen D. Short (College of Charleston) Mediation and Moderation Analyses with R Saturday, February 28, 2015 1 / 25 Overview Mediation analysis in R Simple mediation model example Multiple mediator model example Moderation analysis in R Continuous moderator model example Simple slope figures Tips For slides and code please visit http://stephendshort.wix.com/psyc Stephen D. Short (College of Charleston) Mediation and Moderation Analyses with R Saturday, February 28, 2015 2 / 25 Mediation Occurs when the effect of one variable (X) on another variable (Y) “passes through” a third variable (M) M = a0 + aX + eM 0 Y = b0 + bM + c X + ey The indirect effect is quantified as ab Stephen D. Short (College of Charleston) Mediation and Moderation Analyses with R Saturday, February 28, 2015 3 / 25 Notable Mediation Packages Available in R R packages for mediation analyses BayesMed (Nuijten, Wetzels, Matzke, Dolan, & Wagenmakers, 20015) bmem (Zhang & Wang, 2011) mediation (Tingley, Yamamoto, Hirose, Keele, & Imai, 2014) powerMediation (Qui, 2015) RMediation (Tofighi & MacKinnon, 2010) Functions within other packages mediate () in psych package (Revelle, 2012) mediation () in MBESS package (Kelley & Lai, 2012) Note. This is not a complete list, but merely suggestions for social science researchers Stephen D. Short (College of Charleston) Mediation and Moderation Analyses with R Saturday, February 28, 2015 4 / 25 Example 1: Data From Pollack, VanEpps, & Hayes (2012) Also example data in Hayes (2013) mediation text Does economic stress (X) lead to a desire to withdraw from small business (Y), as a result of negative affect (M)? N = 262 small business owners X = estress (1-7 Likert scale) M = affect (1-5 Likert scale) Y = withdraw (1-7 Likert scale) Example data available from www.afhayes.com Stephen D. -

Smartphone Use and Academic Performance of University Students: a Mediation and Moderation Analysis
sustainability Article Smartphone Use and Academic Performance of University Students: A Mediation and Moderation Analysis Rizwan Raheem Ahmed 1,* , Faryal Salman 2, Shahab Alam Malik 1, Dalia Streimikiene 3,* , Riaz Hussain Soomro 2 and Munwar Hussain Pahi 4 1 Faculty of Management Sciences, Indus University, Block-17, Gulshan, Karachi 75300, Pakistan; [email protected] 2 Institute of Health Management, Dow University of Health Sciences, Mission Road, Karachi 74200, Pakistan; [email protected] (F.S.); [email protected] (R.H.S.) 3 Institute of Sport Science and Innovations, Lithuanian Sports University, Sporto str. 6, Kaunas 44221, Lithuania 4 College of Business Management, PAF-KIET University, Korangi Creek, Karachi 75190, Pakistan; [email protected] * Correspondence: [email protected] (R.R.A.); [email protected] (D.S.) Received: 3 December 2019; Accepted: 1 January 2020; Published: 6 January 2020 Abstract: The purpose of the undertaken study is to examine the influence of smartphones on the performance of university students in Pakistan. This paper also investigates the functions of a smartphone as exogenous predictors such as smartphone applications, multimedia messaging service (MMS), short message service (SMS), warp-speed processing, and entertainment on the academic performance of a student. This paper also addresses the impact of electronic word of mouth (eWOM) and attitude as mediating variables between exogenous and endogenous variables. Finally, we incorporated technology and addiction as moderating variables between independent variables and the outcome variable to measure the influence of moderating variables. We have taken 684 responses from seven universities in Pakistan and employed the SEM-based multivariate approach for the analysis of the data. -
Moderation Fundamentals
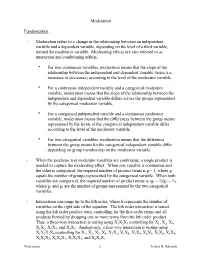
Moderation Fundamentals: - Moderation refers to a change in the relationship between an independent variable and a dependent variable, depending on the level of a third variable, termed the moderator variable. Moderating effects are also referred to as interaction and conditioning effects. * For two continuous variables, moderation means that the slope of the relationship between the independent and dependent variable varies (i.e., increases or decreases) according to the level of the moderator variable. * For a continuous independent variable and a categorical moderator variable, moderation means that the slope of the relationship between the independent and dependent variable differs across the groups represented by the categorical moderator variable. * For a categorical independent variable and a continuous moderator variable, moderation means that the differences between the group means represented by the levels of the categorical independent variable differ according to the level of the moderator variable. * For two categorical variables, moderation means that the difference between the group means for the categorical independent variable differ depending on group membership on the moderator variable. - When the predictor and moderator variables are continuous, a single product is needed to capture the moderating effect. When one variable is continuous and the other is categorical, the required number of product terms is g – 1, where g equals the number of groups represented by the categorical variable. When both variables are categorical, the required number of product terms is (g1 – 1)(g2 – 1), where g1 and g2 are the number of groups represented by the two categorical variables. - Interactions can range up to the kth order, where k represents the number of variables on the right side of the equation. -

The Great Moderation and the Relationship Between Output Growth and Its Volatility
The Great Moderation and the Relationship between Output Growth and Its Volatility WenShwo Fang Department of Economics Feng Chia University 100 WenHwa Road Taichung, TAIWAN [email protected] and Stephen M. Miller* College of Business University of Nevada, Las Vegas 4505 Maryland Parkway Las Vegas, Nevada, USA 89154-6005 [email protected] Abstract: This study examines the effect of the Great Moderation on the relationship between U.S. output growth and its volatility over the period 1947 to 2006. First, we consider the possible effects of structural change in the volatility process. In so doing, we employ GARCH-M and ARCH-M specifications of the process describing output growth rate and its volatility with and without a one-time structural break in volatility. Second, our data analyses and empirical results suggest no significant relationship between the output growth rate and its volatility, favoring the traditional wisdom of dichotomy in macroeconomics. Moreover, the evidence shows that the time-varying variance falls sharply or even disappears once we incorporate a one-time structural break in the unconditional variance of output starting 1982 or 1984. That is, the integrated GARCH effect proves spurious. Finally, a joint test of a trend change and a one-time shift in the volatility process finds that the one-time shift dominates. Keywords: Great Moderation, economic growth and volatility, structural change in variance, IGARCH JEL classification: C32; E32; O40 * Corresponding author 1. Introduction Macroeconomic volatility declined substantially during the past 20 years. Kim and Nelson (1999), McConnell and Perez-Quiros (2000), Blanchard and Simon (2001), Stock and Watson (2003), and Ahmed, Levin, and Wilson (2004), among others, document this Great Moderation in the volatility of U.S. -

Moderation Analysis
Statistics Solutions Advancement Through Clarity https://www.statisticssolutions.com Moderation Analysis Statistics Solutions provides a data analysis plan template for moderation analysis. You can use this template to develop the data analysis section of your dissertation or research proposal. The template includes research questions stated in statistical language, analysis justification and assumptions of the analysis. Simply edit the blue text to reflect your research information and you will have the data analysis plan for your dissertation or research proposal. Copy and paste the following into a word document to use as your data analysis plan template. Research Question: To what extent does moderator moderate the relationship between independent variable and dependent variable? H0: Moderator does not moderate the relationship between independent variable and dependent variable. Ha: Moderator does moderate the relationship between independent variable and dependent variable. Data Analysis To examine the research question, a Baron and Kenny moderation analysis will be conducted to assess if moderator moderates the relationship between independent variable and dependent variable. To examine for moderation, a multiple linear regression will be conducted. The independent variables of the regression are independent variable, moderator, and the interaction between independent variable and moderator. The interaction is created by multiplying independent variable and moderator together after both have been centered to have a mean of 0. The dependent variable of the regression is dependent variable. If the interaction is significant, then moderation is supported. Reference Statistics Solutions. (2013). Data analysis plan: Moderation Analysis [WWW Document]. Retrieved from http://www.statisticssolutions.com/academic-solutions/member-resources/member-profile/data- analysis-plan-templates/data-analysis-plan-moderation-analysis/ 1 / 1 Powered by TCPDF (www.tcpdf.org). -
Advanced Regression Methods Symposium on Updates on Clinical Research Methodology March 18, 2013
Advanced Regression Methods Symposium on Updates on Clinical Research Methodology March 18, 2013 Lloyd Mancl, PhD Charles Spiekerman, PhD Oral Health Sciences Oral Health Sciences University of Washington University of Washington [email protected] [email protected] Outline • Introduce common regression methods for different types of outcomes – Logistic regression – Multiple linear regression – Cox proportional hazards regression – Poisson or log-linear regression • Uses of regression: – Adjust for confounding – Assess for effect modification or interaction – Account for non-independent outcomes Uses for Multiple regression analysis • Used to adjust for confounding – In observational studies, groups of interest can differ on other variables that may be related to the outcome. – In an RCT, randomization may not result in balanced groups. • Used to assess simultaneously the associations for several explanatory variables, as well as, interactions between variables – In observational studies, you may be interested in how several explanatory variables are related to an outcome. – In an RCT, we are often interested in testing if treatment is modified by another variable (i.e., interaction or moderation). – In designed experiments, we typically test for interactions between the different study factors. • Used to develop a prediction equation – Not commonly used for this purpose; not covered in this workshop. Multiple regression analysis Models the association between one outcome variable, Y, and multiple variables of interest, X1, X2,…,Xk. Multiple Linear -

Discriminant Analysis As a Decision-Making Tool for Geochemically Fingerprinting Sources of Groundwater Salinity and Other Work
Syracuse University SURFACE Theses - ALL May 2018 Discriminant analysis as a decision-making tool for geochemically fingerprinting sources of groundwater salinity and other work Nathaniel Chien Syracuse University Follow this and additional works at: https://surface.syr.edu/thesis Part of the Physical Sciences and Mathematics Commons Recommended Citation Chien, Nathaniel, "Discriminant analysis as a decision-making tool for geochemically fingerprinting sources of groundwater salinity and other work" (2018). Theses - ALL. 203. https://surface.syr.edu/thesis/203 This Thesis is brought to you for free and open access by SURFACE. It has been accepted for inclusion in Theses - ALL by an authorized administrator of SURFACE. For more information, please contact [email protected]. Abstract The thesis presented herein is a compilation of two different research projects I have been fortunate enough to work on during my graduate career at Syracuse University. The first and most complete project is a data analysis study using linear discriminant analysis to differentiate between sources of groundwater salinity in water samples from shallow groundwater wells. It is a model validation study that builds on previous work spearheaded by the Earth Sciences Department at Syracuse University. It represents some of my best work performed at Syracuse and should be considered the bulk of my thesis submission. Due to successful publication of that research early into my graduate career I had the opportunity to work on another project. The Technical Supplement is a review of the work I have done in collaboration with The Nature Conservancy. The main project goal was to study the hydrologic effects that beaver dam analogues may have on an incised stream system and to understand the utility of drone-derived imagery for hydrologic modeling. -

CVS, Annals of Applied Statistics, 2, 665-686
Qingzhao Yu 3rd Floor, 2020 Gravier Street New Orleans, LA 70112 Phone: (504)568-6086 [email protected] http://publichealth.lsuhsc.edu/Faculty pages/qyu/index.html (Last updated on August 6, 2021) Education The Ohio State University, Department of Statistics Ph.D. in Statistics M.S. in Statistics Wuhan University, China, Business School M.A. in Management B.A. in Economics Professional Experience Jul. 2018-Present Professor (with tenure), Biostatistics Program, School of Public Health, LSU Health New Orleans Jul. 2012-Jun. 2018 Associate Professor (with tenure), Biostatistics Program, School of Public Health, LSU Health New Orleans Sep. 2006-Jun. 2012 Assistant Professor, Biostatistics Program, School of Public Health, LSU Health New Orleans Jan.-Aug. 2003, Teaching Assistant, Department of Statistics, The Ohio State Oct.-Dec. 2004 University (OSU) Jul. 2005-Aug. 2006 Research Assistant, Department of Statistics, OSU Jan.-Jun. 2004, 2005 Consultant, Statistical Consulting Service, OSU Sep. 2003-Aug. 2004 Research Assistant, Center for Survey Research, OSU Teaching Short Courses “Mediation Analysis and Software with Applications to Explore Health Dispar- ities,” half day short course, 2019 WNAR/IMS annual meeting, Portland, Oregon, June 23-26, 2019. “Applied Bayesian Analysis,” workshop at School of Public Health, LSUHSC, New Orleans, Louisiana, summer, 2010. LSU Health Sciences Center Course Director (Sole Instructor and *Course Developer) BIOS 6314: Clinical Trials Methodology (Fall, 2021) BIOS 6100: Biostatistical Methods I (Fall, -

Modelling Double-Moderated-Mediation & Confounder Effects Using Bayesian Statistics
Modelling Double-Moderated-Mediation & Confounder Effects Using Bayesian Statistics George Chryssochoidis*, Lars Tummers**, Rens van de Schoot***, * Norwich Business School, University of East Anglia ** Erasmus University Rotterdam & University of California, Berkeley *** Utrecht University & North-West University, South Africa Abstract This study provides an example on how to conceptualize and estimate models when double moderated mediation with nominal and continuous (Likert type) variables need to be simultaneously accounted for, and also how to appease reservations given the biases due to the implicit sequential ignorability assumption (endogeneity) regularly overseen in marketing research. We explain the issues and apply the proposed solution using empirical data. The benefits for research are considerable as this approach is superior to other approaches (e.g. splitting the sample by the binary moderator and estimating a moderated mediation model) while also accounting for accounted confounders. Introduction Researchers may regularly face 2 important empirical estimation problems that have substantial modelling , estimation but also theory-development implications. Our first empirical problem relates to the estimation of indirect (mediation) effects in the context of more than one moderation influences when one is nominal and the second is continuous. Researchers have been traditionally interested on whether an antecedent/ treatment variable (X) influences an outcome (Y) via a post-treatment/intervening mediator variable (M) and how such influence varies between groups (for example, men and women) (see Muller et al., 2005 for a review of the topic). Substantial work has been conducted by Preacher, Hayes and colleagues (see for instance http://www.quantpsy.org/pubs.htm or http://www.afhayes.com/ for a list of their works; also see Preacher et al. -

Moderation Analysis by Elaine Eisenbeisz
Vol. 14, No. 2, February 2018 “Happy Trials to You” Making Sense of Biostatistics: Moderation Analysis By Elaine Eisenbeisz Continuing on from last month’s column about mediation, the simplest research studies compare treatment arms and endpoints. But often, there are one or more lurking variables that might explain some or all of the effects between the treatment arms and endpoints. These variables are called “effect modifiers” because, well, that is what they do. Variables like gender, age, ethnicity, baseline measurements, or any other variables that are associated with an outcome could be influencing the outcomes, in addition to, or more than, the treatment. Moderation is one more of many types of effect modifiers. A moderator is a variable that, when included in an analysis, affects the strength of the relationship between a treatment and an endpoint. A moderator can be either continuous or categorical. A good way to think about the difference between a mediator variable and a moderator variable is: Mediators speak to how or why an effect between a treatment and outcome occurs. Mediators happen outside the intervention-to-endpoint process. Mediators explain the relationship between two other variables. Moderators influence the strength of a relationship between the treatment and outcome. They might even determine when certain effects hold at all, depending on the levels of the moderator. Like mediators, moderators differ from confounders. A confounder is something that occurs outside the intervention-to-endpoint process. Often, the randomization process can account for them. In contrast, with moderators, there is a different relationship between the treatment and outcome at different levels of the moderator. -

How to Use the Psych Package for Mediation/Moderation/Regression Analysis
How to use the psych package for mediation/moderation/regression analysis William Revelle September 21, 2021 Contents 1 Overview of this and related documents3 1.1 Jump starting the psych package{a guide for the impatient.........3 1.2 For the not impatient..............................4 2 Multiple regression and mediation4 3 Regression using setCor 5 3.1 Comparison with lm on complete data.....................5 3.1.1 It is important to know your data by describing it first........5 3.1.2 Now do the regressions..........................5 3.2 From a correlation matrix............................8 3.3 The Hotelling example..............................9 3.4 Moderated multiple regression.......................... 12 3.5 Plotting the interactions............................. 13 3.6 Comparisons to lm ................................ 14 4 Mediation using the mediate function 16 4.1 Simple mediation................................. 17 4.2 Multiple mediators................................ 20 4.3 Serial mediators.................................. 21 4.4 Single mediators, multiple covariates...................... 22 4.5 Single predictor, single criterion, multiple covariates............. 24 4.6 Multiple predictors, single criterion....................... 25 5 Mediation and moderation 25 5.1 To center or not to center, that is the question................ 30 1 5.2 Another example of moderated medation................... 32 5.3 Graphic Displays of Interactions........................ 33 6 Partial Correlations 36 6.1 Partial some variables from the rest of the variables............. 36 6.2 Partial everything from everything....................... 36 7 Related packages 37 8 Development version and a users guide 39 9 Psychometric Theory 39 10 SessionInfo 39 2 1 Overview of this and related documents To do basic and advanced personality and psychological research using R is not as compli- cated as some think.