Advancing Digital Soil Mapping and Assessment in Arid Landscapes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Digital Mapping of Soil Properties in the Western-Facing Slope of Jabal
JJEES (2020) 11 (3): 193-201 JJEES ISSN 1995-6681 Jordan Journal of Earth and Environmental Sciences Digital Mapping of Soil Properties in the Western-Facing Slope of Jabal Al-Arab at Suwaydaa Governorate, Syria Alaa Khallouf 1,4, Sami AlHinawi2, Wassim AlMesber3, Sameer Shamsham4,Younis Idries5 1General Commission for Scientific Agricultural Research (GCSAR), Damascus, Syria 2Suwayda Research Center- GCSAR, Suwayda, Syria 3Damascus University, Faculty of Agriculture, Department of Soil Science, Syria 4Al-Baath University, Faculty of Agriculture, Department of Soil and Land reclamation, Syria 5General Organization of Remote Sensing (GORS), Syria Received 28 December 2019; Accepted 10 April 2020 Abstract Digital soil mapping has been increasingly used to produce statistical models of the relationships between environmental variables and soil properties. This study aimed at determining and representing the spatial distribution of the variability in soil properties of western face-sloping of Jabal Al-Arab, Suwaydaa governorate. pH, organic matter (OM), total nitrogen (N), phosphorus (P, as P2O5), potassium (K, as K2O), iron (Fe), boron (B) and zinc (Zn) were studied, thus, Forty-five surface soil samples (0 to 30 cm) were collected and analyzed. Descriptive statistics demonstrated that most of the measured soil variables (except pH, P2O5, and Zn) were skewed and ab-normally distributed, and logarithmic transformation was then applied. Kriging was used- as geostatistical tool- in ArcGIS to interpolate observed values for those variables, and the digital map layers were produced based on each soil property. Geostatistical interpolation recognized a strong spatial variability for pH, P2O5 & Zn, moderate for OM, N, Fe & B, and weak for K2O. -

Digital Soil Mapping in the Bara District of Nepal Using Kriging Tool in Arcgis
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Agronomy & Horticulture -- Faculty Publications Agronomy and Horticulture Department 10-26-2018 Digital soil mapping in the Bara district of Nepal using kriging tool in ArcGIS Dinesh Panday University of Nebraska-Lincoln, [email protected] Bijesh Maharjan University of Nebraska-Lincoln, [email protected] Devraj Chalise Nepal Agricultural Research Council Ram Kumar Shrestha Institute of Agriculture and Animal Science, Lamjung, Nepal Bikesh Twanabasu Westfalische Wilhelms Universitat, Munster Follow this and additional works at: https://digitalcommons.unl.edu/agronomyfacpub Part of the Agricultural Science Commons, Agriculture Commons, Agronomy and Crop Sciences Commons, Botany Commons, Horticulture Commons, Other Plant Sciences Commons, and the Plant Biology Commons Panday, Dinesh; Maharjan, Bijesh; Chalise, Devraj; Shrestha, Ram Kumar; and Twanabasu, Bikesh, "Digital soil mapping in the Bara district of Nepal using kriging tool in ArcGIS" (2018). Agronomy & Horticulture -- Faculty Publications. 1130. https://digitalcommons.unl.edu/agronomyfacpub/1130 This Article is brought to you for free and open access by the Agronomy and Horticulture Department at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Agronomy & Horticulture -- Faculty Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. RESEARCH ARTICLE Digital soil mapping in the Bara district of Nepal using kriging tool in ArcGIS 1 1 2 3 Dinesh PandayID *, Bijesh Maharjan , Devraj Chalise , Ram Kumar Shrestha , Bikesh Twanabasu4,5 1 Department of Agronomy and Horticulture, University of Nebraska-Lincoln, Lincoln, Nebraska, United States of America, 2 Nepal Agricultural Research Council, Lalitpur, Nepal, 3 Institute of Agriculture and Animal Science, Lamjung Campus, Lamjung, Nepal, 4 Hexa International Pvt. -

The Soil Survey
The Soil Survey The soil survey delineates the basal soil pattern of an area and characterises each kind of soil so that the response to changes can be assessed and used as a basis for prediction. Although in an economic climate it is necessarily made for some practical purpose, it is not subordinated to the parti cular need of the moment, but is conducted in a scientific way that provides basal information of general application and eliminates the necessity for a resurvey whenever a new problem arises. It supplies information that can be combined, analysed, or amplified for many practical purposes, but the purpose should not be allowed to modify the method of survey in any fundamental way. According to the degree of detail required, soil surveys in New Zealand are classed as general, . district, or detailed. General surveys produce sufficient detail for a final map on the scale of 4 miles to an inch (1 :253440); they show the main sets of soils and their general relation to land forms; they are an aid to investigations and planning on the regional or national scale. District surveys, for maps, on the scale of 2 miles to an inch (1: 126720), show soil types or, where the pattern is detailed, combinations of types; they are designed to show the soil pattern in sufficient detail to allow the study of local soil problems and to provide a basis for assembling and distributing information in many fields such as agriculture, forestry, and engineering. Detailed surveys, mostiy for maps on the scale of 40 chains to an inch (1 :31680), delineate soil types and land-use phases, and show the soil pattern in relation to farm boundaries and subdivisional fences. -
Agricultural Soil Compaction: Causes and Management
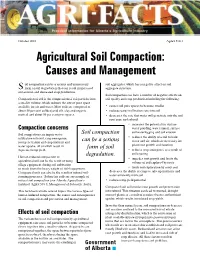
October 2010 Agdex 510-1 Agricultural Soil Compaction: Causes and Management oil compaction can be a serious and unnecessary soil aggregates, which has a negative affect on soil S form of soil degradation that can result in increased aggregate structure. soil erosion and decreased crop production. Soil compaction can have a number of negative effects on Compaction of soil is the compression of soil particles into soil quality and crop production including the following: a smaller volume, which reduces the size of pore space available for air and water. Most soils are composed of • causes soil pore spaces to become smaller about 50 per cent solids (sand, silt, clay and organic • reduces water infiltration rate into soil matter) and about 50 per cent pore spaces. • decreases the rate that water will penetrate into the soil root zone and subsoil • increases the potential for surface Compaction concerns water ponding, water runoff, surface soil waterlogging and soil erosion Soil compaction can impair water Soil compaction infiltration into soil, crop emergence, • reduces the ability of a soil to hold root penetration and crop nutrient and can be a serious water and air, which are necessary for water uptake, all of which result in form of soil plant root growth and function depressed crop yield. • reduces crop emergence as a result of soil crusting Human-induced compaction of degradation. • impedes root growth and limits the agricultural soil can be the result of using volume of soil explored by roots tillage equipment during soil cultivation or result from the heavy weight of field equipment. • limits soil exploration by roots and Compacted soils can also be the result of natural soil- decreases the ability of crops to take up nutrients and forming processes. -

Advanced Crop and Soil Science. a Blacksburg. Agricultural
DOCUMENT RESUME ED 098 289 CB 002 33$ AUTHOR Miller, Larry E. TITLE What Is Soil? Advanced Crop and Soil Science. A Course of Study. INSTITUTION Virginia Polytechnic Inst. and State Univ., Blacksburg. Agricultural Education Program.; Virginia State Dept. of Education, Richmond. Agricultural Education Service. PUB DATE 74 NOTE 42p.; For related courses of study, see CE 002 333-337 and CE 003 222 EDRS PRICE MF-$0.75 HC-$1.85 PLUS POSTAGE DESCRIPTORS *Agricultural Education; *Agronomy; Behavioral Objectives; Conservation (Environment); Course Content; Course Descriptions; *Curriculum Guides; Ecological Factors; Environmental Education; *Instructional Materials; Lesson Plans; Natural Resources; Post Sc-tondary Education; Secondary Education; *Soil Science IDENTIFIERS Virginia ABSTRACT The course of study represents the first of six modules in advanced crop and soil science and introduces the griculture student to the topic of soil management. Upon completing the two day lesson, the student vill be able to define "soil", list the soil forming agencies, define and use soil terminology, and discuss soil formation and what makes up the soil complex. Information and directions necessary to make soil profiles are included for the instructor's use. The course outline suggests teaching procedures, behavioral objectives, teaching aids and references, problems, a summary, and evaluation. Following the lesson plans, pages are coded for use as handouts and overhead transparencies. A materials source list for the complete soil module is included. (MW) Agdex 506 BEST COPY AVAILABLE LJ US DEPARTMENT OFmrAITM E nufAT ION t WE 1. F ARE MAT IONAI. ItiST ifuf I OF EDuCATiCiN :),t; tnArh, t 1.t PI-1, t+ h 4t t wt 44t F.,.."11 4. -

Biological Soil Crust Community Types Differ in Key Ecological Functions
UC Riverside UC Riverside Previously Published Works Title Biological soil crust community types differ in key ecological functions Permalink https://escholarship.org/uc/item/2cs0f55w Authors Pietrasiak, Nicole David Lam Jeffrey R. Johansen et al. Publication Date 2013-10-01 DOI 10.1016/j.soilbio.2013.05.011 Peer reviewed eScholarship.org Powered by the California Digital Library University of California Soil Biology & Biochemistry 65 (2013) 168e171 Contents lists available at SciVerse ScienceDirect Soil Biology & Biochemistry journal homepage: www.elsevier.com/locate/soilbio Short communication Biological soil crust community types differ in key ecological functions Nicole Pietrasiak a,*, John U. Regus b, Jeffrey R. Johansen c,e, David Lam a, Joel L. Sachs b, Louis S. Santiago d a University of California, Riverside, Soil and Water Sciences Program, Department of Environmental Sciences, 2258 Geology Building, Riverside, CA 92521, USA b University of California, Riverside, Department of Biology, University of California, Riverside, CA 92521, USA c Biology Department, John Carroll University, 1 John Carroll Blvd., University Heights, OH 44118, USA d University of California, Riverside, Botany & Plant Sciences Department, 3113 Bachelor Hall, Riverside, CA 92521, USA e Department of Botany, Faculty of Science, University of South Bohemia, Branisovska 31, 370 05 Ceske Budejovice, Czech Republic article info abstract Article history: Soil stability, nitrogen and carbon fixation were assessed for eight biological soil crust community types Received 22 February 2013 within a Mojave Desert wilderness site. Cyanolichen crust outperformed all other crusts in multi- Received in revised form functionality whereas incipient crust had the poorest performance. A finely divided classification of 17 May 2013 biological soil crust communities improves estimation of ecosystem function and strengthens the Accepted 18 May 2013 accuracy of landscape-scale assessments. -

A Systemic Approach for Modeling Soil Functions
SOIL, 4, 83–92, 2018 https://doi.org/10.5194/soil-4-83-2018 © Author(s) 2018. This work is distributed under SOIL the Creative Commons Attribution 4.0 License. A systemic approach for modeling soil functions Hans-Jörg Vogel1,5, Stephan Bartke1, Katrin Daedlow2, Katharina Helming2, Ingrid Kögel-Knabner3, Birgit Lang4, Eva Rabot1, David Russell4, Bastian Stößel1, Ulrich Weller1, Martin Wiesmeier3, and Ute Wollschläger1 1Helmholtz Centre for Environmental Research – UFZ, Permoserstr. 15, 04318 Leipzig, Germany 2Leibniz Centre for Agricultural Landscape Research (ZALF), Eberswalder Straße 84, 15374 Müncheberg, Germany 3TUM School of Life Sciences Weihenstephan, Technical University of Munich, Emil-Ramann-Straße 2, 85354 Freising, Germany 4Senckenberg Museum of Natural History, Sonnenplan 7, 02826 Görlitz, Germany 5Martin-Luther-University Halle-Wittenberg, Institute of Soil Science and Plant Nutrition, Von-Seckendorff-Platz 3, 06120 Halle (Saale), Germany Correspondence: Hans-Jörg Vogel ([email protected]) Received: 13 September 2017 – Discussion started: 4 October 2017 Revised: 2 February 2018 – Accepted: 14 February 2018 – Published: 15 March 2018 Abstract. The central importance of soil for the functioning of terrestrial systems is increasingly recognized. Critically relevant for water quality, climate control, nutrient cycling and biodiversity, soil provides more func- tions than just the basis for agricultural production. Nowadays, soil is increasingly under pressure as a limited resource for the production of food, energy and raw materials. This has led to an increasing demand for concepts assessing soil functions so that they can be adequately considered in decision-making aimed at sustainable soil management. The various soil science disciplines have progressively developed highly sophisticated methods to explore the multitude of physical, chemical and biological processes in soil. -

The Muencheberg Soil Quality Rating (SQR)
The Muencheberg Soil Quality Rating (SQR) FIELD MANUAL FOR DETECTING AND ASSESSING PROPERTIES AND LIMITATIONS OF SOILS FOR CROPPING AND GRAZING Lothar Mueller, Uwe Schindler, Axel Behrendt, Frank Eulenstein & Ralf Dannowski Leibniz-Zentrum fuer Agrarlandschaftsforschung (ZALF), Muencheberg, Germany with contributions of Sandro L. Schlindwein, University of St. Catarina, Florianopolis, Brasil T. Graham Shepherd, Nutri-Link, Palmerston North, New Zealand Elena Smolentseva, Russian Academy of Sciences, Institute of Soil Science and Agrochemistry (ISSA), Novosibirsk, Russia Jutta Rogasik, Federal Agricultural Research Centre (FAL), Institute of Plant Nutrition and Soil Science, Braunschweig, Germany 1 Draft, Nov. 2007 The Muencheberg Soil Quality Rating (SQR) FIELD MANUAL FOR DETECTING AND ASSESSING PROPERTIES AND LIMITATIONS OF SOILS FOR CROPPING AND GRAZING Lothar Mueller, Uwe Schindler, Axel Behrendt, Frank Eulenstein & Ralf Dannowski Leibniz-Centre for Agricultural Landscape Research (ZALF) e. V., Muencheberg, Germany with contributions of Sandro L. Schlindwein, University of St. Catarina, Florianopolis, Brasil T. Graham Shepherd, Nutri-Link, Palmerston North, New Zealand Elena Smolentseva, Russian Academy of Sciences, Institute of Soil Science and Agrochemistry (ISSA), Novosibirsk, Russia Jutta Rogasik, Federal Agricultural Research Centre (FAL), Institute of Plant Nutrition and Soil Science, Braunschweig, Germany 2 TABLE OF CONTENTS PAGE 1. Objectives 4 2. Concept 5 3. Procedure and scoring tables 7 3.1. Field procedure 7 3.2. Scoring of basic indicators 10 3.2.0. What are basic indicators? 10 3.2.1. Soil substrate 12 3.2.2. Depth of A horizon or depth of humic soil 14 3.2.3. Topsoil structure 15 3.2.4. Subsoil compaction 17 3.2.5. Rooting depth and depth of biological activity 19 3.2.6. -
Good Practices for the Preparation of Digital Soil Maps
UNIVERSIDAD DE COSTA RICA CENTRO DE INVESTIGACIONES AGRONÓMICAS FACULTAD DE CIENCIAS AGROALIMENTARIAS GOOD PRACTICES FOR THE PREPARATION OF DIGITAL SOIL MAPS Resilience and comprehensive risk management in agriculture Inter-american Institute for Cooperation on Agriculture University of Costa Rica Agricultural Research Center UNIVERSIDAD DE COSTA RICA CENTRO DE INVESTIGACIONES AGRONÓMICAS FACULTAD DE CIENCIAS AGROALIMENTARIAS GOOD PRACTICES FOR THE PREPARATION OF DIGITAL SOIL MAPS Resilience and comprehensive risk management in agriculture Inter-american Institute for Cooperation on Agriculture University of Costa Rica Agricultural Research Center GOOD PRACTICES FOR THE PREPARATION OF DIGITAL SOIL MAPS Inter-American institute for Cooperation on Agriculture (IICA), 2016 Good practices for the preparation of digital soil maps by IICA is licensed under a Creative Commons Attribution-ShareAlike 3.0 IGO (CC-BY-SA 3.0 IGO) (http://creativecommons.org/licenses/by-sa/3.0/igo/) Based on a work at www.iica.int IICA encourages the fair use of this document. Proper citation is requested. This publication is also available in electronic (PDF) format from the Institute’s Web site: http://www.iica. int Content Editorial coordination: Rafael Mata Chinchilla, Dangelo Sandoval Chacón, Jonathan Castro Chinchilla, Foreword .................................................... 5 Christian Solís Salazar Editing in Spanish: Máximo Araya Acronyms .................................................... 6 Layout: Sergio Orellana Caballero Introduction .................................................. 7 Translation into English: Christina Feenny Cover design: Sergio Orellana Caballero Good practices for the preparation of digital soil maps................. 9 Printing: Sergio Orellana Caballero Glossary .................................................... 15 Bibliography ................................................. 18 Good practices for the preparation of digital soil maps / IICA, CIA – San Jose, C.R.: IICA, 2016 00 p.; 00 cm X 00 cm ISBN: 978-92-9248-652-5 1. -

Progressive and Regressive Soil Evolution Phases in the Anthropocene
Progressive and regressive soil evolution phases in the Anthropocene Manon Bajard, Jérôme Poulenard, Pierre Sabatier, Anne-Lise Develle, Charline Giguet- Covex, Jeremy Jacob, Christian Crouzet, Fernand David, Cécile Pignol, Fabien Arnaud Highlights • Lake sediment archives are used to reconstruct past soil evolution. • Erosion is quantified and the sediment geochemistry is compared to current soils. • We observed phases of greater erosion rates than soil formation rates. • These negative soil balance phases are defined as regressive pedogenesis phases. • During the Middle Ages, the erosion of increasingly deep horizons rejuvenated pedogenesis. Abstract Soils have a substantial role in the environment because they provide several ecosystem services such as food supply or carbon storage. Agricultural practices can modify soil properties and soil evolution processes, hence threatening these services. These modifications are poorly studied, and the resilience/adaptation times of soils to disruptions are unknown. Here, we study the evolution of pedogenetic processes and soil evolution phases (progressive or regressive) in response to human-induced erosion from a 4000-year lake sediment sequence (Lake La Thuile, French Alps). Erosion in this small lake catchment in the montane area is quantified from the terrigenous sediments that were trapped in the lake and compared to the soil formation rate. To access this quantification, soil processes evolution are deciphered from soil and sediment geochemistry comparison. Over the last 4000 years, first impacts on soils are recorded at approximately 1600 yr cal. BP, with the erosion of surface horizons exceeding 10 t·km− 2·yr− 1. Increasingly deep horizons were eroded with erosion accentuation during the Higher Middle Ages (1400–850 yr cal. -

Anatomy of a Sub-Cambrian Paleosol in Wisconsin
Anatomy of a Sub-Cambrian Paleosol in Wisconsin: Mass Fluxes of Chemical Weathering and Climatic Conditions in North America during Formation of the Cambrian Great Unconformity L. Gordon Medaris Jr.,1,* Steven G. Driese,2 Gary E. Stinchcomb,3 John H. Fournelle,1 Seungyeol Lee,1,4 Huifang Xu,1,4 Lyndsay DiPietro,2 Phillip Gopon,5 and Esther K. Stewart6 1. Department of Geoscience, University of Wisconsin, Madison, Wisconsin 53706, USA; 2. Department of Geosciences, Terrestrial Paleoclimatology Research Group, Baylor University, Waco, Texas 76798, USA; 3. Department of Geosciences and Watershed Studies Institute, Murray State University, Murray, Kentucky 42071, USA; 4. NASA Astrobiology Institute, University of Wisconsin, Madison, Wisconsin 53706, USA; 5. Department of Earth Sciences, University of Oxford, South Parks Road, Oxford OX1 3AN, United Kingdom; 6. Wisconsin Geological and Natural History Survey, Madison, Wisconsin 53705, USA ABSTRACT A paleosol beneath the Upper Cambrian Mount Simon Sandstone in Wisconsin provides an opportunity to evaluate the characteristics of Cambrian weathering in a subtropical climate, having been located at 207S paleolatitude 500 My ago. The 285-cm-thick paleosol resulted from advanced chemical weathering of a gabbroic protolith, recording a total mass loss of 50%. Weathering of hornblende and plagioclase produced a pedogenic assemblage of quartz, chlorite, kaolinite, goethite, and, in the lowest part of the profile, siderite. Despite the paucity of quartz in the protolith and 40% removal of SiO2 from the profile, quartz constitutes 11%–23% of the pedogenic mineral assemblage. Like many other Precambrian and Cambrian paleosols in the Lake Superior region, the paleosol experienced potassium metasomatism, now con- taining 10%–25% mixed-layer illite-vermiculite and 5%–44% potassium feldspar. -

A New Era of Digital Soil Mapping Across Forested Landscapes 14 Chuck Bulmera,*, David Pare´ B, Grant M
CHAPTER A new era of digital soil mapping across forested landscapes 14 Chuck Bulmera,*, David Pare´ b, Grant M. Domkec aBC Ministry Forests Lands Natural Resource Operations Rural Development, Vernon, BC, Canada, bNatural Resources Canada, Canadian Forest Service, Laurentian Forestry Centre, Quebec, QC, Canada, cNorthern Research Station, USDA Forest Service, St. Paul, MN, United States *Corresponding author ABSTRACT Soil maps provide essential information for forest management, and a recent transformation of the map making process through digital soil mapping (DSM) is providing much improved soil information compared to what was available through traditional mapping methods. The improvements include higher resolution soil data for greater mapping extents, and incorporating a wide range of environmental factors to predict soil classes and attributes, along with a better understanding of mapping uncertainties. In this chapter, we provide a brief introduction to the concepts and methods underlying the digital soil map, outline the current state of DSM as it relates to forestry and global change, and provide some examples of how DSM can be applied to evaluate soil changes in response to multiple stressors. Throughout the chapter, we highlight the immense potential of DSM, but also describe some of the challenges that need to be overcome to truly realize this potential. Those challenges include finding ways to provide additional field data to train models and validate results, developing a group of highly skilled people with combined abilities in computational science and pedology, as well as the ongoing need to encourage communi- cation between the DSM community, land managers and decision makers whose work we believe can benefit from the new information provided by DSM.