Gomezberdugo Umd 0117N 2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Complex Analysis in Fluid Mechanics
MATH 566: FINAL PROJECT December 2, 2010 JAN E.M. FEYS Complex analysis is a standard part of any math curriculum. Less known is the intense connection between the pure complex analysis and fluid dynamics. In this project we try to give an insight into some of the interesting applications that exist. 1. THE JOUKOWSKY AIRFOIL 1.1. Introduction. The theory of complex variables comes in naturally in the study of fluid phenomena. Let us define w = f + iy with f the velocity potential and y the Lagrange stream function. Then w turns out to be analytic because the Cauchy-Riemann conditions ¶f ¶y ¶f ¶y v = = ; v = = − x ¶x ¶y y ¶y ¶x are exactly the natural flow conditions that have to be satisfied. The function w is called the complex velocity potential. Also note that dw = v − iv : dz x y Basic examples of velocity potentials are the uniform stream w = Uz¯ where U represents flow speed and the vortex w = (−iG=2p)ln(z) where G represents rotation speed counted counterclockwise. An important role is dedicated to transformations F that are angle- preserving or conformal. Because compositions of analytic functions are analytic, we can use transforms to map simple cases onto harder ones. 1.2. Flow past a cylinder. Let us include circulation and look at the circular cylindrical case. We omit viscosity and other effects. One can write a2 iG z w = zU¯ + U + ln z 2p a for the velocity potential of a flow past a circular cylinder. Here a is the diameter of the cylinder, U the flow speed and G a vortex related parameter as discussed earlier. -

Viscous Airfoil Optimization Using Conformal Mapping Coefficients As Design Variables
Viscous Airfoil Optimization Using Conformal Mapping Coefficients as Design Variables by Thomas Mead Sorensen B.S. University of Rochester (1989) SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science at the Massachusetts Institute of Technology June 1991 @1991, Massachusetts Institute of Technology Signature of Author L gtmnentrP of Aeronautics and Astronautics May 3, 1991 Certified by Professor Mark Drela Thesis Supervisor, Department of Aeronautics and Astronautics Accepted by -.- I ~PYj~H(rL-~L.. ~V .. , . rrgga Y. Wachman Chairman, Department Graduate Committee MASSACriUSErfS iNSTITUTE OF TFIýrtev-.- l JUN 12 1991 LIBRARIES Aetu Viscous Airfoil Optimization Using Conformal Mapping Coefficients as Design Variables by Thomas Mead Sorensen Submitted to the Department of Aeronautics and Astronautics on May 3, 1991 in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics and Astronautics The XFOIL viscous airfoil design code was extended to allow optimization using conformal mapping coefficients as design variables. The optimization technique em- ployed was the Steepest Descent method applied to an Objective/Penalty Function. An important idea of this research is the manner in which gradient information was calculated. The derivatives of the aerodynamic variables with respect to the design variables were cheaply calculated as a by-product of XFOIL's viscous Newton solver. The speed of the optimization process was further increased by updating the Newton system boundary layer variables after each optimization step using the available gradi- ent information. It was determined that no more than 10 of each of the symmetric and anti-symmetric modes should be used during the optimization process due to inaccurate calculations of the higher mode derivatives. -

ABSTRACT Flowfield Estimation and Vortex Stabilization Near an Actuated Airfoil Daniel Fernando Gomez Berdugo Master of Science
ABSTRACT Title of thesis: Flowfield Estimation and Vortex Stabilization near an Actuated Airfoil Daniel Fernando Gomez Berdugo Master of Science, 2019 Thesis directed by: Professor Derek A. Paley Department of Aerospace Engineering and Institute for Systems Research Feedback control of unsteady flow structures is a challenging problem that is of interest for the creation of agile bio-inspired micro aerial vehicles. This thesis presents two separate results in the estimation and control of unsteady flow struc- tures: the application of a principled estimation method that generates full flowfield estimates using data obtained from a limited number of pressure sensors, and the analysis of a nonlinear control system consisting of a single vortex in a freestream near an actuated cylinder and an airfoil. The estimation method is based on Dy- namic Mode Decompositions (DMD), a data-driven algorithm that approximates a time series of data as a sum of modes that evolve linearly. DMD is used here to create a linear system that approximates the flow dynamics and pressure sensor output from Particle Image Velocimetry (PIV) and pressure measurements of the flowfield around the airfoil. A DMD Kalman Filter (DMD-KF) uses the pressure measurements to estimate the evolution of this linear system, and thus produce an approximation of the flowfield from the pressure data alone. The DMD-KF is imple- mented for experimental data from two different setups: a pitching cambered ellipse airfoil and a surging NACA 0012 airfoil. Filter performance is evaluated using the original flowfield PIV data, and compared with a DMD reconstruction. For control analysis, heaving and/or surging are used as input to stabilize the vortex position relative to the body. -

Airborne Wind Energy Airfoils M Sc. T Hesis
Airborne Wind Energy Airfoils Design of Pareto-optimal airfoils for rigid wing systems in the field of Airborne Wind Energy E.J. Kroon 4157958 Aerospace Engineering MSc. Thesis Aerodynamics and Wind Energy October 24, 2018 Airborne Wind Energy Airfoils By Erik Jan Kroon in partial fulfilment of the requirements for the degree of Master of Science in Aerodynamics and Wind Energy at the Delft University of Technology, to be defended publicly on October 24, 2018 Supervisor: ir. Gaël de Oliveira Andrade Thesis committee: Prof. dr. Simon Watson Dr. ir. Matteo Pini ir. Nando Timmer Preface This Master of Science Thesis has been written at the Wind Energy group of Delft University of Technology; faculty of Aerospace Engineering; Aerodynamics, Wind Energy, and Propulsion department, in fulfilment of the master program Aerodynamics and Wind Energy. I would like to express my gratitude to the many people that have helped me. First I would like to thank the company ’e-kite’ which took me in as an intern and showed me the exciting new possibilities in the field of Airborne Wind Energy. Special thanks to Coert Smeenk and Alfred van den Brink for the interesting discussions and the guidance during my internship, and Uwe Fechner (contracted by e-kite) for providing the topic of this thesis. Many thanks to my supervisor Gaël de Oliveira Andrade, without whose previous work this thesis would not have existed, and whose extensive experience and advice have been a tremendous help. Last but not least I would also like to thank my friends and family who have supported me for many years helping me get to where I am now. -
The Kutta-Joukowski Theorem
Continuum Mechanics Lecture 7 Theory of 2D potential flows Prof. Romain Teyssier http://www.itp.uzh.ch/~teyssier Continuum Mechanics 20/05/2013 Romain Teyssier Outline - velocity potential and stream function - complex potential - elementary solutions - flow past a cylinder - lift force: Blasius formulae - Joukowsky transform: flow past a wing - Kutta condition - Kutta-Joukowski theorem Continuum Mechanics 20/05/2013 Romain Teyssier 2D potential flows From the Helmholtz decomposition, we have v = −→ φ + −→ −→A ∇ ∇× 2D flows are defined by ∂ ( )=0 and v =0 . z · z We have therefore −→A = ψez We consider in this chapter incompressible and irrotational flows. −→ v =0 ∆φ =0 ∇ · + B. C. −→ v =0 ∆ψ =0 v n =0 ∇× · We have two alternative but equivalent approaches. vx = ∂xφ vy = ∂yφ where the velocity potential satisfies the Laplace equation. vx = ∂yψ vy = ∂xψ where the stream function satisfies the Laplace equation. − In the potential case, the irrotational condition is satisfied automatically. In the stream function approach, this is the divergence free condition. Since both conditions are satisfied, both velocity fields are equal. Continuum Mechanics 20/05/2013 Romain Teyssier Isopotential curves and stream lines The velocity field is defined equivalently by two scalar fields vx = ∂xφ = ∂yψ v = ∂ φ = ∂ ψ y y − x They are conjugate functions that satisfy the Cauchy-Riemann relations. They are also harmonic functions (Laplace equation), with however different B. C. ∆ φ =0 in S with −→ φ n =0 on the boundary L ∇ · ∆ ψ =0 in S with −→ ψ t =0 on the boundary L or ψ = constant along L ∇ · dy vx Isopotential curves are defined by d φ =d x ∂ x φ +d y ∂ y φ =0 or = dx − vy dy vy Stream lines are defined by d ψ =d x ∂ x ψ +d y ∂ y ψ =0 or = dx vx Isopotential curves and stream lines are orthogonal to each other. -

Modeling the Fluid Flow Around Airfoils Using Conformal Mapping
Modeling the Fluid Flow around Airfoils Using Conformal Mapping Nitin R. Kapania, Katherine Terracciano, Shannon Taylor August 29, 2008 Abstract The modeling of fluid interactions around airfoils is difficult given the complicated, often non-symmetric geometries involved. The complex variable technique of conformal mapping is a useful intermediate step that allows for complicated airfoil flow problems to be solved as problems with simpler geometry. In this paper, we use the conformal mapping technique to model the fluid flow around the NACA 0012, 2215, and 4412 airfoils by using the Joukowsky transformation to link the flow solution for a cylinder to that of an airfoil. The flow around a cylinder was derived with the superposition of ele- mentary potential flows using an inviscid, incompressible fluid model. Lift calculations as a function of angle of attack for each airfoil were obtained using the transformed flow solutions and fundamental theories of aerodynamics. These calculations are compared against lift calculations provided by the thin airfoil method. Lift calculations for the NACA 0012 airfoil match well with expected results, while there is a discrepancy at low angles of attack for the 2215 and 4412 airfoils. Key Terms: NACA airfoil, conformal mapping, Joukowsky transforma- tion, inviscid flow. 70 1 Introduction In the field of fluid dynamics, an area of significant practical importance is the study of airfoils. An airfoil refers to the cross sectional shape of an object designed to generate lift when moving through a fluid. Fundamentally, an airfoil generates lift by diverting the motion of fluid flowing over its surface in a downward direction, resulting in an upward reaction force by Newton's third law [2]. -

Modeling the Fluid Flow Around Airfoils Using Conformal Mapping
Modeling the Fluid Flow around Airfoils Using Conformal Mapping Nitin R. Kapania, Katherine Terracciano, Shannon Taylor August 29, 2008 Abstract The modeling of fluid interactions around airfoils is difficult given the complicated, often non-symmetric geometries involved. The complex variable technique of conformal mapping is a useful intermediate step that allows for complicated airfoil flow problems to be solved as problems with simpler geometry. In this paper, we use the conformal mapping technique to model the fluid flow around the NACA 0012, 2215, and 4412 airfoils by using the Joukowsky transformation to link the flow solution for a cylinder to that of an airfoil. The flow around a cylinder was derived with the superposition of ele- mentary potential flows using an inviscid, incompressible fluid model. Lift calculations as a function of angle of attack for each airfoil were obtained using the transformed flow solutions and fundamental theories of aerodynamics. These calculations are compared against lift calculations provided by the thin airfoil method. Lift calculations for the NACA 0012 airfoil match well with expected results, while there is a discrepancy at low angles of attack for the 2215 and 4412 airfoils. Key Terms: NACA airfoil, conformal mapping, Joukowsky transforma- tion, inviscid flow. Copyright © SIAM 70 Unauthorized reproduction of this article is prohibited 1 Introduction In the field of fluid dynamics, an area of significant practical importance is the study of airfoils. An airfoil refers to the cross sectional shape of an object designed to generate lift when moving through a fluid. Fundamentally, an airfoil generates lift by diverting the motion of fluid flowing over its surface in a downward direction, resulting in an upward reaction force by Newton's third law [2]. -

Mostafa Abobaker
UNIVERSITY OF BELGRADE FACULTY OF MECHANICAL ENGINEERING MOSTAFA ABOBAKER LOW REYNOLDS NUMBER AIRFOILS DOCTORAL DISSERTATION BELGRADE 2017 УНИВЕРЗИТЕТ У БЕОГРАДУ МАШИНСКИ ФАКУЛТЕТ Мосtафа Абобакер АЕРОПРОФИЛИ ЗА МАЛЕ РЕЈНОЛДСОВЕ БРОЈЕВЕ Докторска дисертација БЕОГРАД, 2017 TO MY FAMILY ACKNOWLEDGEMENTS I would like to express my sincere thanks and gratitude to my advisor professor Zlatko Petrovic for his valuable and continuous advice, thoughtfulness and assistance throughout the duration of this work. I would like to express my sincere thanks and gratitude to all PhD program staff members in Mechanical Engineering Faculty and to the Innovation Center in Mechanical Engineering Faculty. I would like to express my gratitude to Libyan Ministry of High Education and Science Research and to Libyan Scholarship Administration for their financial support. This research would not have been accomplished without their support. I also would like to take this opportunity to thank my family who are surely proud of me on this day. Special thanks to the staffs, students and friends that I have met during my research study especially those in the Mechanical Engineering Department. Above all, I am very much grateful to almighty Allah for giving me courage and good health for completing this research. Mostafa Abobaker BELGRADE 2017 Abstract In this thesis, the flow around airfoils at low Reynolds numbers has been modeled. The model utilizes inviscid-viscous interaction method. The inviscid-viscous interaction method supplemented by an adequate laminar separation bubble modeling forms an efficient design tool when numerical optimization by systematic shape modification is anticipated. The inviscid solution of the potential flow equation is based on conformal mapping. -
Ep 2275671 A1
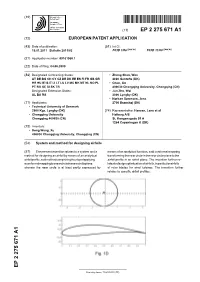
(19) & (11) EP 2 275 671 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 19.01.2011 Bulletin 2011/03 F03D 1/06 (2006.01) F03D 11/00 (2006.01) (21) Application number: 09161960.1 (22) Date of filing: 04.06.2009 (84) Designated Contracting States: • Zhong Shen, Wen AT BE BG CH CY CZ DE DK EE ES FI FR GB GR 2820 Gentofte (DK) HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL • Chen, Jin PT RO SE SI SK TR 400030 Chongqing University, Chongqing (CN) Designated Extension States: • Jun Zhu, Wei AL BA RS 2800 Lyngby (DK) • Nørkær Sørensen, Jens (71) Applicants: 2700 Brønshøj (DK) • Technical University of Denmark 2800 Kgs. Lyngby (DK) (74) Representative: Hansen, Lene et al • Chongqing University Høiberg A/S Chongqing 400030 (CN) St. Kongensgade 59 A 1264 Copenhagen K (DK) (72) Inventors: • Dong Wang, Xu 400030 Chongqing University, Chongqing (CN) (54) System and method for designing airfoils (57) The present invention relates to a system and a means of an analytical function, said conformal mapping method for designing an airfoil by means of an analytical transforming the near circle in the near circle plane to the airfoil profile, said method comprising the step of applying airfoil profile in an airfoil plane. The invention further re- aconformal mapping to a near circle in a near circle plane, lates to design optimization of airfoils, in particular airfoils wherein the near circle is at least partly expressed by of rotor blades for wind turbines. The invention further relates to specific airfoil profiles.