Lecture Notes in Oceanography
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Coastal Processes and Causes of Shoreline Erosion and Accretion Causes of Shoreline Erosion and Accretion
Coastal Processes and Causes of Shoreline Erosion and Accretion and Accretion Erosion Causes of Shoreline Heather Weitzner, Great Lakes Coastal Processes and Hazards Specialist Photo by Brittney Rogers, New York Sea Grant York Photo by Brittney Rogers, New New York Sea Grant Waves breaking on the eastern Lake Ontario shore. Wayne County Cooperative Extension A shoreline is a dynamic environment that evolves under the effects of both natural 1581 Route 88 North and human influences. Many areas along New York’s shorelines are naturally subject Newark, NY 14513-9739 315.331.8415 to erosion. Although human actions can impact the erosion process, natural coastal processes, such as wind, waves or ice movement are constantly eroding and/or building www.nyseagrant.org up the shoreline. This constant change may seem alarming, but erosion and accretion (build up of sediment) are natural phenomena experienced by the shoreline in a sort of give and take relationship. This relationship is of particular interest due to its impact on human uses and development of the shore. This fact sheet aims to introduce these processes and causes of erosion and accretion that affect New York’s shorelines. Waves New York’s Sea Grant Extension Program Wind-driven waves are a primary source of coastal erosion along the Great provides Equal Program and Lakes shorelines. Factors affecting wave height, period and length include: Equal Employment Opportunities in 1. Fetch: the distance the wind blows over open water association with Cornell Cooperative 2. Length of time the wind blows Extension, U.S. Department 3. Speed of the wind of Agriculture and 4. -
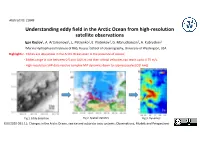
Understanding Eddy Field in the Arctic Ocean from High-Resolution Satellite Observations Igor Kozlov1, A
Abstract ID: 21849 Understanding eddy field in the Arctic Ocean from high-resolution satellite observations Igor Kozlov1, A. Artamonova1, L. Petrenko1, E. Plotnikov1, G. Manucharyan2, A. Kubryakov1 1Marine Hydrophysical Institute of RAS, Russia; 2School of Oceanography, University of Washington, USA Highlights: - Eddies are ubiquitous in the Arctic Ocean even in the presence of sea ice; - Eddies range in size between 0.5 and 100 km and their orbital velocities can reach up to 0.75 m/s. - High-resolution SAR data resolve complex MIZ dynamics down to submesoscales [O(1 km)]. Fig 1. Eddy detection Fig 2. Spatial statistics Fig 3. Dynamics EGU2020 OS1.11: Changes in the Arctic Ocean, sea ice and subarctic seas systems: Observations, Models and Perspectives 1 Abstract ID: 21849 Motivation • The Arctic Ocean is a host to major ocean circulation systems, many of which generate eddies transporting water masses and tracers over long distances from their formation sites. • Comprehensive observations of eddy characteristics are currently not available and are limited to spatially and temporally sparse in situ observations. • Relatively small Rossby radii of just 2-10 km in the Arctic Ocean (Nurser and Bacon, 2014) also mean that most of the state-of-art hydrodynamic models are not eddy-resolving • The aim of this study is therefore to fill existing gaps in eddy observations in the Arctic Ocean. • To address it, we use high-resolution spaceborne SAR measurements to detect eddies over the ice-free regions and in the marginal ice zones (MIZ). EGU20 -OS1.11 – Kozlov et al., Understanding eddy field in the Arctic Ocean from high-resolution satellite observations 2 Abstract ID: 21849 Methods • We use multi-mission high-resolution spaceborne synthetic aperture radar (SAR) data to detect eddies over open ocean and marginal ice zones (MIZ) of Fram Strait and Beaufort Gyre regions. -

Lecture 7. More on BL Wind Profiles and Turbulent Eddy Structures in This
Atm S 547 Boundary Layer Meteorology Bretherton Lecture 7. More on BL wind profiles and turbulent eddy structures In this lecture… • Stability and baroclinicity effects on PBL wind and temperature profiles • Large-eddy structures and entrainment in shear-driven and convective BLs. Stability effects on overall boundary layer structure Above the surface layer, the wind profile is also affected by stability. As we mentioned previously, unstable BLs tend to have much more well-mixed wind profiles than stable BLs. Fig. 1 shows observations from the Wangara experiment on how the velocity defects and temperature profile are altered by BL stability (as measured by H/L). Within stability classes, the velocity profiles collapse when scaled with a velocity scale u* and the observed BL depth H, but there is a large difference between the stability classes. Baroclinicity We would expect baroclinicity (vertical shear of geostrophic wind) to also affect the observed wind profile. This is most easily seen for a laminar steady-state Ekman layer in a geostrophic wind with constant vertical shear ug(z) = (G + Mz, Nz), where M = -(g/fT0)∂T/∂y, N = (g/fT0)∂T/∂x. The momentum equations and BCs are: -f(v - Nz) = ν d2u/dz2 f(u - G - Mz) = ν d2v/dz2 u(0) = 0, u(z) ~ G + Mz as z → ∞. v(0) = 0, v(z) ~ Nz as z → ∞. The resultant BL velocity profile is the classical Ekman layer with the thermal wind added onto it. u(z) = G(1 - e-ζ cos ζ) + Mz, (7.1) 1/2 v(z) = G e- ζ sin ζ + Nz. -

Preliminary Catalog of the Sedimentary Basins of the United States
Preliminary Catalog of the Sedimentary Basins of the United States By James L. Coleman, Jr., and Steven M. Cahan Open-File Report 2012–1111 U.S. Department of the Interior U.S. Geological Survey U.S. Department of the Interior KEN SALAZAR, Secretary U.S. Geological Survey Marcia K. McNutt, Director U.S. Geological Survey, Reston, Virginia: 2012 For more information on the USGS—the Federal source for science about the Earth, its natural and living resources, natural hazards, and the environment, visit http://www.usgs.gov or call 1–888–ASK–USGS. For an overview of USGS information products, including maps, imagery, and publications, visit http://www.usgs.gov/pubprod To order this and other USGS information products, visit http://store.usgs.gov Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. Government. Although this information product, for the most part, is in the public domain, it also may contain copyrighted materials as noted in the text. Permission to reproduce copyrighted items must be secured from the copyright owner. Suggested citation: Coleman, J.L., Jr., and Cahan, S.M., 2012, Preliminary catalog of the sedimentary basins of the United States: U.S. Geological Survey Open-File Report 2012–1111, 27 p. (plus 4 figures and 1 table available as separate files) Available online at http://pubs.usgs.gov/of/2012/1111/. iii Contents Abstract ...........................................................................................................................................................1 -

Analysis of Hydrometeorological Conditions in the South Baltic Sea During the Stormy Weather O N 2 7 Th November, 2016
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ SCIENTIFIC JOURNAL OF POLISH NAVAL ACADEMY 2017 (LVIII) 2 (209) DOI: 10.5604/01.3001.0010.4062 Czesław Dyrcz ANALYSIS OF HYDROMETEOROLOGICAL CONDITIONS IN THE SOUTH BALTIC SEA DURING THE STORMY WEATHER O N 2 7 TH NOVEMBER, 2016 ABSTRACT The paper presents results of research concerning hydrological and meteorological conditions during the stormy weather on 27th November, 2016 in the South Baltic Sea and over the Polish coast. The wind which occurred the South Baltic Sea at that time reached the force of 7 Beaufort degree and in gusts 8 to 9 Beaufort degree. The south part of the Baltic Sea was affected by the low pressure system (981 hPa) which the centre was situated in South Finland and Northwest Russia. Some destroys were observed on the Polish coast line and in ports of the Gdansk Bay. The analysis is concerned on the wind force, the wind direction, the atmospheric pressure and the sea water level in some places of the Polish coast line and especially in the Gdansk Bay. Key words: sea water level, weather conditions, the South Baltic Sea. INTRODUCTION Occurrence of strong winds in the area of the Baltic Sea and on the Polish coast is related mainly with active cyclones. This means that the strong winds zone is of the synoptic scale, i.e. it extends in an area of over 500 NM across and it lasts for a few days. Storms cause serious difficulties or they are even threats to safety of sea navigation and work in harbors. They often destroy hydrotechnical devices and coast facilities. -

Hydrogeology of Near-Shore Submarine Groundwater Discharge
Hydrogeology and Geochemistry of Near-shore Submarine Groundwater Discharge at Flamengo Bay, Ubatuba, Brazil June A. Oberdorfer (San Jose State University) Matthew Charette, Matthew Allen (Woods Hole Oceanographic Institution) Jonathan B. Martin (University of Florida) and Jaye E. Cable (Louisiana State University) Abstract: Near-shore discharge of fresh groundwater from the fractured granitic rock is strongly controlled by the local geology. Freshwater flows primarily through a zone of weathered granite to a distance of 24 m offshore. In the nearshore environment this weathered granite is covered by about 0.5 m of well-sorted, coarse sands with sea water salinity, with an abrupt transition to much lower salinity once the weathered granite is penetrated. Further offshore, low-permeability marine sediments contained saline porewater, marking the limit of offshore migration of freshwater. Freshwater flux rates based on tidal signal and hydraulic gradient analysis indicate a fresh submarine groundwater discharge of 0.17 to 1.6 m3/d per m of shoreline. Dissolved inorganic nitrogen and silicate were elevated in the porewater relative to seawater, and appeared to be a net source of nutrients to the overlying water column. The major ion concentrations suggest that the freshwater within the aquifer has a short residence time. Major element concentrations do not reflect alteration of the granitic rocks, possibly because the alteration occurred prior to development of the current discharge zones, or from elevated water/rock ratios. Introduction While there has been a growing interest over the last two decades in quantifying the discharge of groundwater to the coastal zone, the majority of studies have been carried out in aquifers consisting of unlithified sediments or in karst environments. -

Meeting Report-V2.0 V1.0Report
10th OceanSITES Steering Committee Meeting Report-V2.0 V1.0Report 10th OceanSITES Steering Team meeting Date: 03-05 November 2014 Location: Hotel Armação, Porto de Galinhas Beach, Pernambuco, Brazil Authors: Uwe Send (Scripps Institution of Oceanography) Champika Gallage (JCOMMOPS Project Office) Meeting information: http://www.jcomm.info/oceansites2014 1 10th OceanSITES Steering Committee Meeting Report-V2.0 V1.0Report Revision Information Date Prepared by Reviewed by Version 03 Dec 2014 C Gallage U. Send V1.0 01 May 2015 Steering team V2.0 2 10th OceanSITES Steering Committee Meeting Report-V2.0 V1.0Report Table of Contents 10TH OCEANSITES STEERING TEAM MEETING ......................................................................... 1 REVISION INFORMATION ............................................................................................................. 2 TABLE OF CONTENTS ................................................................................................................................3 1. INTRODUCTION ................................................................................................................. 4 2. SCOPE OF THE MEETING................................................................................................. 6 3. OCEANSITES MISSION ..................................................................................................... 7 4. OCEANSITES CHARTER ................................................................................................... 7 5. HOW TO BECOME AN OCEANSITE -

In Classical Fluid Dynamics, a Boundary Layer Is the Layer I
Atm S 547 Boundary Layer Meteorology Bretherton Lecture 1 Scope of Boundary Layer (BL) Meteorology (Garratt, Ch. 1) In classical fluid dynamics, a boundary layer is the layer in a nearly inviscid fluid next to a surface in which frictional drag associated with that surface is significant (term introduced by Prandtl, 1905). Such boundary layers can be laminar or turbulent, and are often only mm thick. In atmospheric science, a similar definition is useful. The atmospheric boundary layer (ABL, sometimes called P[lanetary] BL) is the layer of fluid directly above the Earth’s surface in which significant fluxes of momentum, heat and/or moisture are carried by turbulent motions whose horizontal and vertical scales are on the order of the boundary layer depth, and whose circulation timescale is a few hours or less (Garratt, p. 1). A similar definition works for the ocean. The complexity of this definition is due to several complications compared to classical aerodynamics. i) Surface heat exchange can lead to thermal convection ii) Moisture and effects on convection iii) Earth’s rotation iv) Complex surface characteristics and topography. BL is assumed to encompass surface-driven dry convection. Most workers (but not all) include shallow cumulus in BL, but deep precipitating cumuli are usually excluded from scope of BLM due to longer time for most air to recirculate back from clouds into contact with surface. Air-surface exchange BLM also traditionally includes the study of fluxes of heat, moisture and momentum between the atmosphere and the underlying surface, and how to characterize surfaces so as to predict these fluxes (roughness, thermal and moisture fluxes, radiative characteristics). -

Lagrangian Measurement of Subsurface Poleward Flow Between 38 Degrees N and 43 Degrees N Along the West Coast of the United States During Summer, 1993
CORE Metadata, citation and similar papers at core.ac.uk Provided by Calhoun, Institutional Archive of the Naval Postgraduate School Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Faculty and Researcher Publications 1996-09-01 Lagrangian Measurement of subsurface poleward Flow between 38 degrees N and 43 degrees N along the West Coast of the United States during Summer, 1993 Collins, Curtis A. Geophysical Research Letters, Vol. 23, No. 18, pp. 2461-2464, September 1, 1996 http://hdl.handle.net/10945/45730 GEOPHYSICAL RESEARCH LETTERS, VOL. 23, NO. 18, PAGES 2461-2464, SEPTEMBER 1, 1996 Lagrangian Measurement of subsurface poleward Flow between 38øN and 43øN along the West Coast of the United States during Summer, 1993 CurtisA. Collins,Newell Garfield, Robert G. Paquette,and Everett Carter 1 Departmentof Oceanography,Naval Postgraduate School, Monterey, California Abstract. SubsurfaceLagrangian measurementsat about Undercurrentalong the coastsof California and Oregon. We 140 m showedthat the pathof the CaliforniaUndercurrent lay are using quasi-isobaric(float depth controlled primarily by next to the continentalslope betweenSan Francisco(37.80N) the pressureeffect on density)RAFOS floats (Rossby et al., and St. GeorgeReef (41.8øN) duringmid-summer 1993. The 1986) to make these measurements. A RAFOS float consists meanspeed along this 500 km pathwas 8 cms-1. Theflow at of a hydrophonemounted in a glasstube that is about2 meters this depth was not disturbedby upwelling centersat Point long. These hydrophonesreceive signals from three sound Reyesor CapeMendocino. Restfits also demonstratethe abil- sources that were moored 400 km offshore between 34.3øN and ity to acousticallytrack floats located well above the sound 40.4øN.The sound sources emit 15 W, 80 s signalsa•t 260 Hz channelaxis along the California coast. -

Caverns Measureless to Man: Interdisciplinary Planetary Science & Technology Analog Research Underwater Laser Scanner Survey (Quintana Roo, Mexico)
Caverns Measureless to Man: Interdisciplinary Planetary Science & Technology Analog Research Underwater Laser Scanner Survey (Quintana Roo, Mexico) by Stephen Alexander Daire A Thesis Presented to the Faculty of the USC Graduate School University of Southern California In Partial Fulfillment of the Requirements for the Degree Master of Science (Geographic Information Science and Technology) May 2019 Copyright © 2019 by Stephen Daire “History is just a 25,000-year dash from the trees to the starship; and while it’s going on its wild and woolly but it’s only like that, and then you’re in the starship.” – Terence McKenna. Table of Contents List of Figures ................................................................................................................................ iv List of Tables ................................................................................................................................. xi Acknowledgements ....................................................................................................................... xii List of Abbreviations ................................................................................................................... xiii Abstract ........................................................................................................................................ xvi Chapter 1 Planetary Sciences, Cave Survey, & Human Evolution................................................. 1 1.1. Topic & Area of Interest: Exploration & Survey ....................................................................12 -

Paleoceanographical Proxies Based on Deep-Sea Benthic Foraminiferal Assemblage Characteristics
CHAPTER SEVEN Paleoceanographical Proxies Based on Deep-Sea Benthic Foraminiferal Assemblage Characteristics Frans J. JorissenÃ, Christophe Fontanier and Ellen Thomas Contents 1. Introduction 263 1.1. General introduction 263 1.2. Historical overview of the use of benthic foraminiferal assemblages 266 1.3. Recent advances in benthic foraminiferal ecology 267 2. Benthic Foraminiferal Proxies: A State of the Art 271 2.1. Overview of proxy methods based on benthic foraminiferal assemblage data 271 2.2. Proxies of bottom water oxygenation 273 2.3. Paleoproductivity proxies 285 2.4. The water mass concept 301 2.5. Benthic foraminiferal faunas as indicators of current velocity 304 3. Conclusions 306 Acknowledgements 308 4. Appendix 1 308 References 313 1. Introduction 1.1. General Introduction The most popular proxies based on microfossil assemblage data produce a quanti- tative estimate of a physico-chemical target parameter, usually by applying a transfer function, calibrated on the basis of a large dataset of recent or core-top samples. Examples are planktonic foraminiferal estimates of sea surface temperature (Imbrie & Kipp, 1971) and reconstructions of sea ice coverage based on radiolarian (Lozano & Hays, 1976) or diatom assemblages (Crosta, Pichon, & Burckle, 1998). These à Corresponding author. Developments in Marine Geology, Volume 1 r 2007 Elsevier B.V. ISSN 1572-5480, DOI 10.1016/S1572-5480(07)01012-3 All rights reserved. 263 264 Frans J. Jorissen et al. methods are easy to use, apply empirical relationships that do not require a precise knowledge of the ecology of the organisms, and produce quantitative estimates that can be directly applied to reconstruct paleo-environments, and to test and tune global climate models. -

University Microfilms, Inc., Ann Arbor, Michigan the SYNTHESIS of POINT DATA
This dissertation has been microfilmed exactly as received 68-16,949 JOHNSON, Rockne Hart, 1930- THE SYNTHESIS OF POINT DATA AND PATH DATA IN ESTIMATING SOFAR SPEED. University of Hawaii, Ph.D., 1968 Geophysics University Microfilms, Inc., Ann Arbor, Michigan THE SYNTHESIS OF POINT DATA AND PATH DATA IN ESTIMATING SOFAR SPEED A DISSERTATION SUBMITTED TO THE GRADUATE DIVISION OF THE UNIVERSITY OF HAWAII IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY IN GEOSCIENCES June 1968 By Rockne Hart Johnson Dissertation Committee: William M. Adams, Chairman Doak C. Cox George H. Sutton George P. Woollard Klaus Wyrtki ii P~F~E Geophysical interest in the deep ocean sound (sofar) channel centers on its use as a tool for the detection and location of remote events. Its potential application to oceanography may lie in the monitoring of variations of physical properties averaged over long paths by sofar travel-time measurements. As the accuracy of computed event locations is generally dependent on the accuracy of travel-time calculations, the spatial and temporal variation of sofar speed is a matter of fundamental interest. The author's interest in this problem has grown out of a practical need for such information for application to the problem of locating the sources of earthquake I waves and submarine volcanic sounds. Although an exten sive body of sound-speed data is available from hydrographic casts, considerably more precise measurements can be made of explosion travel times over long paths. This dissertation develops a novel procedure for analytically combining these two types of data to produce a functional description of the spatial variation of safar speed.