Dialogic Voice API Programming Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
AN2775, Tone Event Detection in Packet Telephony Using The
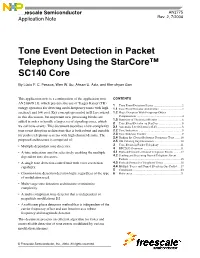
Freescale Semiconductor AN2775 Application Note Rev. 2, 7/2004 Tone Event Detection in Packet Telephony Using the StarCore™ SC140 Core By Lúcio F. C. Pessoa, Wen W. Su, Ahsan U. Aziz, and Kim-chyan Gan This application note is a continuation of the application note CONTENTS AN2384/D [1], which presents the use of Teager-Kaiser (TK) 1 Tone Event Detection Basics ......................................2 energy operators for detecting multi-frequency tones with high 1.1 Tone Event Detector Architecture ..............................2 accuracy and low cost. Key concepts presented in [1] are reused 1.2 Phase Detection With Frequency Offset in this discussion, but important new processing blocks are Compensation .............................................................4 1.3 Summary of Theoretical Results .................................6 added in order to handle a larger set of signaling tones, which 2 Tone Event Detector on StarCore ...............................8 we call tone events. This document describes a low-complexity 2.1 Automatic Level Control (ALC) .................................8 tone event detection architecture that is both robust and suitable 2.2 Tone Indication ...........................................................9 for packet telephony systems with high channel density. The 2.3 Tone Indicator Counter ...............................................9 2.4 Finding the Closest Reference Frequency Tone .......10 proposed architecture is composed of: 2.5 FIR Filtering Implementation ...................................10 -

Integral Enterprise Feature Description
Integral Enterprise Feature Description Issue 2 February 2008 © 2008 Avaya Inc. All Rights Reserved. Notice While reasonable efforts were made to ensure that the information in this document was complete and accurate at the time of printing, Avaya Inc. can assume no liability for any errors. Changes and corrections to the information in this document may be incorporated in future releases. For full support information, please see the complete document, Avaya Support Notices for Software Documentation, document number 03-600758. To locate this document on our Web site, simply go to http://www.avaya.com/support and search for the document number in the search box. Documentation disclaimer Avaya Inc. is not responsible for any modifications, additions, or deletions to the original published version of this documentation unless such modifications, additions, or deletions were performed by Avaya. Customer and/or End User agree to indemnify and hold harmless Avaya, Avaya's agents, servants and employees against all claims, lawsuits, demands and judgments arising out of, or in connection with, subsequent modifications, additions or deletions to this documentation to the extent made by the Customer or End User. Link disclaimer Avaya Inc. is not responsible for the contents or reliability of any linked Web sites referenced elsewhere within this documentation, and Avaya does not necessarily endorse the products, services, or information described or offered within them. We cannot guarantee that these links will work all of the time and we have no control over the availability of the linked pages. Warranty Avaya Inc. provides a limited warranty on this product. Refer to your sales agreement to establish the terms of the limited warranty. -

RTP Payload for DTMF Digits, Telephony Tones and Telephony Signals
Internet Engineering Task Force AVT WG INTERNET-DRAFT H. Schulzrinne/S. Petrack draft-ietf-avt-rfc2833bis-01.ps Columbia U./eDial October 21, 2002 Expires: March 2003 RTP Payload for DTMF Digits, Telephony Tones and Telephony Signals Status of this Memo This document is an Internet-Draft and is in full conformance with all provisions of Section 10 of RFC2026. Internet-Drafts are working documents of the Internet Engineering Task Force (IETF), its areas, and its working groups. Note that other groups may also distribute working documents as Internet-Drafts. Internet-Drafts are draft documents valid for a maximum of six months and may be updated, replaced, or obsoleted by other documents at any time. It is inappropriate to use Internet-Drafts as reference material or to cite them other than as “work in progress.” The list of current Internet-Drafts can be accessed at http://www.ietf.org/ietf/1id-abstracts.txt To view the list Internet-Draft Shadow Directories, see http://www.ietf.org/shadow.html. Copyright Notice Copyright (c) The Internet Society (2002). All Rights Reserved. Abstract This memo describes how to carry dual-tone multifrequency (DTMF) signaling, other tone signals and telephony events in RTP packets. This document updates RFC 2833. 1 Introduction This memo defines two payload formats, one for carrying dual-tone multifrequency (DTMF) digits, other line and trunk signals (Section 3), and a second one for general multi-frequency tones in RTP [1] packets (Section 4). Separate RTP payload formats are desirable since low-rate voice codecs cannot be guaranteed to reproduce these tone signals accurately enough for automatic recognition. -

Cisco SPA100 Series Phone Adapters SPA112 and SPA122
ADMINISTRATION GUIDE Cisco SPA100 Series Phone Adapters SPA112 and SPA122 Downloaded from www.Manualslib.com manuals search engine Cisco and the Cisco Logo are trademarks of Cisco Systems, Inc. and/or its affiliates in the U.S. and other countries. A listing of Cisco's trademarks can be found at www.cisco.com/go/trademarks. Third party trademarks mentioned are the property of their respective owners. The use of the word partner does not imply a partnership relationship between Cisco and any other company. (1005R) © 2011 Cisco Systems, Inc. All rights reserved. OL-25117-01 Downloaded from www.Manualslib.com manuals search engine Contents Chapter 1: Getting Started with the Cisco SPA100 Series Phone Adapters 6 Feature Overview 6 Before You Begin 7 Product Features 8 Connecting the Equipment 10 Overview of the Configuration Utility 11 Launching the Configuration Utility 11 Chapter 2: Quick Setup for Voice over IP Service 14 Chapter 3: Configuring the Network 16 Basic Setup 16 Internet Settings 17 Network Service (SPA122 Only) 19 Network Settings for the LAN and DHCP Server (SPA122 Only) 20 Time Settings 24 Advanced Settings 25 Port Setting (SPA122 Only) 25 MAC Address Clone (SPA122 Only) 26 VPN Passthrough (SPA122 Only) 27 VLAN 28 Application Settings (SPA122 Only) 28 Quality of Service (QoS) (SPA122 Only) 28 Port Forwarding (SPA122 Only) 29 Manually Adding Port Forwarding (SPA122 Only) 31 DMZ (SPA122 Only) 33 Chapter 4: Configuring Voice 34 Getting Started with Voice Services 34 Understanding Voice Port Operations 35 ATA Voice Features -

Master Glossary
GlossaryGL Table 1. Changes to Avaya hardware and software naming conventions Previous name New name MCC (Multi-Carrier Cabinet) Avaya™ MCC1 Media Gateway SCC (Single-Carrier Cabinet) Avaya™ SCC1 Media Gateway DEFINITY® G3r Avaya DEFINITY® Server R with Avaya™ SCC1 Media Gateway and/or Avaya™ MCC1 Media Gateway DEFINITY® G3si Avaya DEFINITY® Server SI with Avaya™ SCC1 Media Gateway and/or Avaya™ MCC1 Media Gateway DEFINITY® G3csi or Avaya DEFINITY® Server CSI with DEFINITY ProLogix Avaya™ CMC1 Media Gateway DEFINITY BCS-ECS Call Avaya™ Communication Manager Processing Software (RXX) DEFINITY® BCS or Avaya™ Communication Manager with DEFINITY® ECS Avaya™ CMC1 Media Gateway or Avaya™ SCC1 Media Gateway and/or Avaya™ MCC1 Media Gateway DEFINITY ECS G3r Avaya Communication Manager running on a DEFINITY Server R IP600 Avaya™ S8100 Media Server with Avaya™ G600 Media Gateway DEFINITY ONE™ Avaya™ S8100 Media Server with Avaya™ CMC1 Media Gateway ECLIPS (Enterprise CLass IP For hardware (servers, gateways, and Solutions) switches): Converged Infrastructure For software (telephony, messaging, and Unified Communication Center): Avaya MultiVantage™ Communications Applications CajunView™ Avaya™ MultiService Network Manager 4.5 CajunView™ Console Avaya™ MultiService Console Continued on next page 1 Glossary Table 1. Changes to Avaya hardware and software naming conventions Previous name New name ConfigMaster including Avaya™ MultiService Configuration EZ2Rule Manager UpdateMaster Avaya™ MultiService Software Update Manager VLANMaster Avaya™ MultiService VLAN Manager AddressMaster Avaya™ MultiService Address Manager SMON™ Avaya MultiService SMON™ Manager 5.0 VisAbility Management Suite System and Network Management Suite Continued on next page Numerics 10/100 Fast Ethernet IEEE standard for 10-Mbps baseband and 100-Mbps baseband over unshielded twisted-pair wire. -
CAS Signaling Traffic Emulation MAPS
MAPS™ CAS Protocol Emulator (Channel Association Signalling (CAS) Emulation) 818 West Diamond Avenue - Third Floor, Gaithersburg, MD 20878 Phone: (301) 670-4784 Fax: (301) 670-9187 Email: [email protected] Website: http://www.gl.com 1 MAPS™ CAS Emulator in Telephony Network 2 MAPS™ CAS Features Call Scenarios • Caller ID Functionalities • Two-way Calling • Voice Prompt Confirmation (requires VQT) • Three-way Calling • Voice Quality and Delay Measurements (requires VQT) • Three-way Calling with Calling Party Number • Detect Caller ID, and VMWI Identification • VMWI – Voice Mail with MWI (message waiting indicator) • Basic telephony functions - On-hook, Off-hook, Detect ringing and SDT (stutter dial tone) signal, Dial, and 3-Way Call (using flash hook) • Call Waiting – Detect tone, call id, flash to accept call • Both analog and digital (T1) CAMA simulation is supported • Dial Tone Delay, Post Pickup Delay, special dial tone, stutter dial Reporting tone, special information tone, call waiting, call in progress tone, • Central Database of events/results/errors reorder tone, busy tone, congestion tone, confirmation tone, • Multi-User, Multi-Test, Multi-Reporting howler tone, and ring-back tone • Executed test cases • Fax - Send /Receive fax image (TIFF format) file from/to the • Successful test cases specified location. • Failed test cases • Call Failure events • Failed reason • Call Completion events • Test results showing voice quality, failed call attempts, • Call Drop (sustain calls) events dropped calls • PDF and CSV file formats 3 MAPS™ CAS -

ETR 196 TECHNICAL July 1995 REPORT
ETSI ETR 196 TECHNICAL July 1995 REPORT Source: ETSI TC-NA Reference: DTR/NA-019001 ICS: 33.020 Key words: PSTN, supplementary service Network Aspects (NA); Call forwarding facilities on the fixed public telephone network ETSI European Telecommunications Standards Institute ETSI Secretariat Postal address: F-06921 Sophia Antipolis CEDEX - FRANCE Office address: 650 Route des Lucioles - Sophia Antipolis - Valbonne - FRANCE X.400: c=fr, a=atlas, p=etsi, s=secretariat - Internet: [email protected] Tel.: +33 92 94 42 00 - Fax: +33 93 65 47 16 Copyright Notification: No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media. New presentation - see History box © European Telecommunications Standards Institute 1995. All rights reserved. Page 2 ETR 196: July 1995 Whilst every care has been taken in the preparation and publication of this document, errors in content, typographical or otherwise, may occur. If you have comments concerning its accuracy, please write to "ETSI Editing and Standards Approval Dept." at the address shown on the title page. Page 3 ETR 196: July 1995 Contents Foreword .......................................................................................................................................................9 Executive summary .......................................................................................................................................9 Introduction..................................................................................................................................................10 -

Dialogic Voice API Programming Guide
Dialogic® Voice API Programming Guide April 2009 05-2332-006 Copyright and Legal Notice Copyright © 2004-2009, Dialogic Corporation. All Rights Reserved. You may not reproduce this document in whole or in part without permission in writing from Dialogic Corporation at the address provided below. All contents of this document are subject to change without notice and do not represent a commitment on the part of Dialogic Corporation or its subsidiaries. Reasonable effort is made to ensure the accuracy of the information contained in the document. However, due to ongoing product improvements and revisions, Dialogic Corporation and its subsidiaries do not warrant the accuracy of this information and cannot accept responsibility for errors or omissions that may be contained in this document. INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH DIALOGIC® PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT. EXCEPT AS EXPLICITLY SET FORTH BELOW OR AS PROVIDED IN A SIGNED AGREEMENT BETWEEN YOU AND DIALOGIC, DIALOGIC ASSUMES NO LIABILITY WHATSOEVER, AND DIALOGIC DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF DIALOGIC PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY INTELLECTUAL PROPERTY RIGHT OF A THIRD PARTY. Dialogic products are not intended for use in medical, life saving, life sustaining, critical control or safety systems, or in nuclear facility applications. Due to differing national regulations and approval requirements, certain Dialogic products may be suitable for use only in specific countries, and thus may not function properly in other countries. -
TR 101 973-2 V1.1.1 (2002-12) Technical Report
ETSI TR 101 973-2 V1.1.1 (2002-12) Technical Report Access and Terminals (AT); Public Switched Telephone Network; Support of legacy terminals by BroadBand IP equipment; Listing of the most relevant features and functionalities; Part 2: Analogue PSTN terminals 2 ETSI TR 101 973-2 V1.1.1 (2002-12) Reference DTR/AT-000002-02 Keywords analogue, broadband, IP, multimedia ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice Individual copies of the present document can be downloaded from: http://www.etsi.org The present document may be made available in more than one electronic version or in print. In any case of existing or perceived difference in contents between such versions, the reference version is the Portable Document Format (PDF). In case of dispute, the reference shall be the printing on ETSI printers of the PDF version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, send your comment to: [email protected] Copyright Notification No part may be reproduced except as authorized by written permission. -
Voice API Programming Guide
Voice API Programming Guide June 2005 05-2377-002 INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL® PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT. EXCEPT AS PROVIDED IN INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEVER, AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF INTEL PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. Intel products are not intended for use in medical, life saving, or life sustaining applications. Intel may make changes to specifications and product descriptions at any time, without notice. This Voice API Programming Guide as well as the software described in it is furnished under license and may only be used or copied in accordance with the terms of the license. The information in this manual is furnished for informational use only, is subject to change without notice, and should not be construed as a commitment by Intel Corporation. Intel Corporation assumes no responsibility or liability for any errors or inaccuracies that may appear in this document or any software that may be provided in association with this document. Except as permitted by such license, no part of this document may be reproduced, stored in a retrieval system, or transmitted in any form or by any means without express written consent -

Universal Multifrequency Tone Detector (UMTD) Algorithm User’S Guide
Universal Multifrequency Tone Detector (UMTD) Algorithm User’s Guide www.spiritDSP.com/CST Literature Number: SPRU638 March 2003 IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its hardware products to the specifications applicable at the time of sale in accor- dance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parame- ters of each product is not necessarily performed. TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. -

ETR 187 TECHNICAL April 1995 REPORT
ETSI ETR 187 TECHNICAL April 1995 REPORT Source: ETSI TC-HF Reference: DTR/HF-01032 ICS: 33.020, 33.040.40 Key words: Human factors, tones Human Factors (HF); Recommendation of characteristics of telephone services tones when locally generated in telephony terminals ETSI European Telecommunications Standards Institute ETSI Secretariat Postal address: F-06921 Sophia Antipolis CEDEX - FRANCE Office address: 650 Route des Lucioles - Sophia Antipolis - Valbonne - FRANCE X.400: c=fr, a=atlas, p=etsi, s=secretariat - Internet: [email protected] Tel.: +33 92 94 42 00 - Fax: +33 93 65 47 16 Copyright Notification: No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media. New presentation - see History box © European Telecommunications Standards Institute 1995. All rights reserved. Page 2 ETR 187: April 1995 Whilst every care has been taken in the preparation and publication of this document, errors in content, typographical or otherwise, may occur. If you have comments concerning its accuracy, please write to "ETSI Editing and Committee Support Dept." at the address shown on the title page. Page 3 ETR 187: April 1995 Contents Foreword .......................................................................................................................................................5 Introduction....................................................................................................................................................5 1 Scope