Trajectory Design to Intercept a Yet-To-Be-Discovered Comet
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Comet Interceptor: a Proposed ESA Mission to a Dynamically New Comet
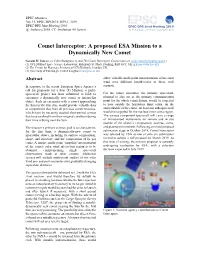
EPSC Abstracts Vol. 13, EPSC-DPS2019-1679-1, 2019 EPSC-DPS Joint Meeting 2019 c Author(s) 2019. CC Attribution 4.0 license. Comet Interceptor: A proposed ESA Mission to a Dynamically New Comet Geraint H. Jones(1,2), Colin Snodgrass(3), and The Comet Interceptor Consortium (see www.cometinterceptor.space ) (1) UCL Mullard Space Science Laboratory, Holmbury St. Mary, Dorking, RH5 6NT, UK ([email protected]) (2) The Centre for Planetary Sciences at UCL/Birkbeck, London, UK (3) University of Edinburgh, United Kingdom ([email protected]) Abstract allow valuable multi-point measurements of the solar wind over different lengtH-scales as tHese craft In response to the recent European Space Agency’s separate. call for proposals for a Fast (F) Mission, a multi- spacecraft project has been submitted to ESA to For the comet encounter, the primary spacecraft, encounter a dynamically new comet or interstellar planned to also act as the primary communication object. SucH an encounter with a comet approacHing point for the whole constellation, would be targetted the Sun for the first time would provide valuable data to pass outside the hazardous inner coma, on the to complement that from all previous comet missions, sunward side of tHe comet. At least one sub-spacecraft whicH Have by necessity studied sHort-period comets would be targetted for tHe nucleus/inner coma region. that Have evolved from their original condition during The various component spacecraft will carry a range their time orbiting near the Sun. of miniaturised instruments for remote and in situ studies of tHe object’s composition, nucleus, coma, The mission’s primary science goal is to cHaracterise, and plasma environment. -
![Arxiv:2005.12932V1 [Astro-Ph.EP] 26 May 2020 with Eccentricity, E = 1.2, ‘Oumuamua Encountered the Solar System with V∞ = 26 Km S](https://docslib.b-cdn.net/cover/6181/arxiv-2005-12932v1-astro-ph-ep-26-may-2020-with-eccentricity-e-1-2-oumuamua-encountered-the-solar-system-with-v-26-km-s-456181.webp)
Arxiv:2005.12932V1 [Astro-Ph.EP] 26 May 2020 with Eccentricity, E = 1.2, ‘Oumuamua Encountered the Solar System with V∞ = 26 Km S
Draft version May 28, 2020 Typeset using LATEX default style in AASTeX63 Evidence that 1I/2017 U1 (`Oumuamua) was composed of molecular hydrogen ice. Darryl Seligman1 and Gregory Laughlin2 1 Dept. of the Geophysical Sciences, University of Chicago, Chicago, IL 60637 2Dept. of Astronomy, Yale University, New Haven, CT 06517 (Received April 14, 2020; Revised May 22, 2020; Accepted May 28, 2020) Submitted to ApJL ABSTRACT `Oumuamua (I1 2017) was the first macroscopic (l ∼ 100 m) body observed to traverse the inner solar system on an unbound hyperbolic orbit. Its light curve displayed strong periodic variation, and it showed no hint of a coma or emission from molecular outgassing. Astrometric measurements indicate that 'Oumuamua experienced non-gravitational acceleration on its outbound trajectory, but energy balance arguments indicate this acceleration is inconsistent with a water ice sublimation-driven jet of the type exhibited by solar system comets. We show that all of `Oumaumua's observed properties can be explained if it contained a significant fraction of molecular hydrogen (H2) ice. H2 sublimation at a rate proportional to the incident solar flux generates a surface-covering jet that reproduces the observed acceleration. Mass wasting from sublimation leads to monotonic increase in the body axis ratio, explaining `Oumuamua's shape. Back-tracing `Oumuamua's trajectory through the Solar System permits calculation of its mass and aspect ratio prior to encountering the Sun. We show that H2-rich bodies plausibly form in the coldest dense cores of Giant Molecular Clouds, where number densities are of order n ∼ 105, and temperatures approach the T = 3 K background. -

Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 2 May–June 2019 CONTENTS FOCUS ..................................................................................................................... 1 European industrial leadership at stake ............................................................................ 1 SPACE POLICY AND PROGRAMMES .................................................................................... 2 EUROPE ................................................................................................................. 2 9th EU-ESA Space Council .......................................................................................... 2 Europe’s Martian ambitions take shape ......................................................................... 2 ESA’s advancements on Planetary Defence Systems ........................................................... 2 ESA prepares for rescuing Humans on Moon .................................................................... 3 ESA’s private partnerships ......................................................................................... 3 ESA’s international cooperation with Japan .................................................................... 3 New EU Parliament, new EU European Space Policy? ......................................................... 3 France reflects on its competitiveness and defence posture in space ...................................... 3 Germany joins consortium to support a European reusable rocket......................................... -

Report on Czech COSPAR-Related Activities in 2019
Report on Czech COSPAR-related activities in 2019 This report summarizes selected results of five Czech institutions represented in the Czech National Committee of COSPAR, namely the Institute of Atmospheric Physics (IAP) of the Czech Academy of Sciences (CAS), the Astronomical Institute (AI) of CAS, the Faculty of Mathematics and Physics of the Charles University (FMP CU), BBT - Materials Processing, and the Czech Space Office. Both selected scientific results and Czech participation in space experiments are reported. There are also significant outreach/PR activities. Participation in space experiments Solar Orbiter (AI CAS, IAP CAS, FMP CU, IPP CAS - TOPTEC) The Solar Orbiter (SOLO) satellite, project ESA-NASA, was successfully launched from Florida on February 10, 2020 at 05:03 CET. Czech institutions have been participating in four out of ten scientific instruments on board of SOLO (STIX, Metis, RPW, and SWA/PAS). Czech commitment to the STIX (remote sensing X-ray telescope led by Switzerland) instrument was fully accomplished. Figure: STIX telescope Another instrument on board the Solar Orbiter is the coronagraph Metis led by Italian PI, with Germany and Czech Republic as Co-PIs. Metis will observe the solar corona in UV in the hydrogen Lyman- line and simultaneously in the visible light. The main optics (two mirrors) were designed and manufactured in the Czech Republic by TOPTEC (section of the Institute of Plasma Physics (IPP) of CAS). The third instrument called RPW (Radio and Plasma Waves) has PI in France, with participation of the AI and IAP CAS. The team at IAP CAS developed and delivered the Time Domain Sampler (TDS) subsystem which will characterize the processes of beam-plasma interactions responsible for generation of Langmuir waves and their conversion to radio emissions. -

PAC March 9 10 2020 Report
NASA ADVISORY COUNCIL PLANETARY SCIENCE ADVISORY COMMITTEE March 9-10, 2020 NASA Headquarters Washington, DC MEETING REPORT _____________________________________________________________ Anne Verbiscer, Chair ____________________________________________________________ Stephen Rinehart, Executive Secretary Table of Contents Opening and Announcements, Introductions 3 PSD Update and Status 3 PSD R&A Status 5 Planetary Protection 7 Discussion 8 Mars Exploration Program 8 Lunar Exploration Program 9 PDCO 11 Planetary Data System 12 PDS at Headquarters 13 Findings and Discussion 13 General Comments 13 Exoplanets in Our Backyard 14 AP Assets for Solar System Observations 15 Solar System Science with JWST 16 Mercury Group 17 VEXAG 17 SBAG 18 OPAG 19 MEPAG 19 MAPSIT 20 LEAG 21 CAPTEM 21 Discussion 22 Findings and Recommendations Discussion 23 Appendix A- Attendees Appendix B- Membership roster Appendix C- Agenda Appendix D- Presentations Prepared by Joan M. Zimmermann Zantech, Inc. 2 Opening, Announcements, Around the Table Identification Executive Secretary of the Planetary Science Advisory Committee (PAC), Dr. Stephen Rinehart, opened the meeting and made administrative announcements. PAC Chair, Dr. Anne Verbiscer, welcomed everyone to the virtual meeting. Announcements were made around the table and on Webex. PSD Status Report Dr. Lori Glaze, Director of the Planetary Science Division, gave a status report. First addressing the President’s Budget Request (PBR) for Fiscal Year 2021 (FY21) for the Science Mission Directorate (SMD), Dr. Glaze noted that it was one of the strongest science budgets in NASA history, representing a 12% increase over the enacted FY20 budget. The total PBR keeps NASA on track to land on the Moon by 2024; and to help prepare for human exploration at Mars. -

ESA / SCI Presentation
Status of the ESA Scientific Programme Günther Hasinger, ESA Director of Science 59th European Space Sciences Committee Meeting 15.May 2020 ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 1 ESA Solar System Fleet ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 2 ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 3 Solar Orbiter Lift-Off ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 4 ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 5 Now ALL instruments switched on! BepiColombo ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 6 BepiColombo Earth Flyby MERTIS MPO-MAG SIXS MGNS M-Cam SERENA Mio -sensors M-Cam PHEBUS M-Cam ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 7 Credits for MPO-MAG audio tracks: ESA/BepiColombo/MPOESA UNCLASSIFIED - For Official-MAG/IGEP Use -IWF-IC-ISAS G. Hasinger ESSC | 15.5.2020 | Slide 8 SERENA PICAM/ MPO MAG comparison ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 9 MERTIS: first results of a novel instrument Raw Data from instrument and calibration source Raw Data merged and additional calibration H. Hiesinger, J. Helbert, M D’Amore MERTIS Team University Münster, Germany DLR Berlin, Germany Credit: DLR Berlin and Westfälische Wilhelms Universität Münster, Germany ESA UNCLASSIFIED - For Official Use G. Hasinger ESSC | 15.5.2020 | Slide 10 Professionals/Amateurs Ground Based Observations 25 cm Telescope - the OCTOPUS telescope in San Pedro de Atacama (Chile) from the 6ROADS network. -

Small Bodies Assessment Group 21St Meeting Preliminary Agenda
Small Bodies Assessment Group 21st Meeting Preliminary Agenda Monday, June 24 8:30 Welcome 8:40 Planetary Science Division overview – Lori Glaze 9:30 Responses to SBAG 18 findings – Lindley Johnson 10:00 Break 10:15 OSIRIS-REx update – Lucy Lim 10:45 Early career talks “Visible – Near-Infrared Spectroscopy of Organics in Meteorites and Asteroids” – Hannah Kaplan “"Surface Composition and Thermal Evolution of Asteroids: Results from the Observatory and Laboratory" – Mike Lucas 11:15 Early career lightning talks 11:30 Open microphone time 11:55 Lunch 1:30 NEOO program – Kelly Fast 1:45 Planetary Defense Coordination Office – Lindley Johnson 2:15 Planetary Defense Conference – Brent Barbee 2:30 Planetary Defense Conference tabletop exercise – Paul Chodas 2:45 The future of NHATS and follow-on – Paul Chodas and Dan Adamo 3:30 Break 3:45 NEOWISE update – Emily Kramer 4:00 NEOCam update – Joe Masiero 4:15 Phobos/Deimos working group – Tom Duxbury 4:30 Open microphone 5:00 End of day Tuesday, June 25 8:30 Destiny Plus update – Tomoko Arai 8:45 Hayabusa2 update – Makoto Yoshikawa 9:15 Hera update – Patrick Michel 9:30 SPHEREx mission – Carey Lisse 9:45 Comet Wirtanen campaign summary – Tony Farnham 10:00 Break 10:30 Minor Planet Center, Comet Subnode of the Planetary Data System – Gerbs Bauer 10:45 Asteroid Subnode of the Planetary Data System – Eric Palmer 11:00 USGS mapping update – Tim Titus 11:15 MAPSIT Planetary Spatial Data Infrastructure Recommendations for Small Bodies – Jason Laura 11:30 Arecibo – Anne Virkki 11:45 Open microphone 12:00 Lunch 1:30 Active asteroids – Gerbs Bauer 1:45 Decadal Survey next steps – Bonnie Buratti 2:00 HEOMD update – Jake Bleacher 2:15 SIMPLEx Finalist Selection, Janus – Christine Hartzell 2:40 New ESA mission, Comet Interceptor – Matthew Knight 3:00 Goals overview – Tim Swindle 3:10 Goals – Diversity – Carolyn Ernst 3:35 Findings, announcement of new members 3:45 Adjourn . -

The Comet Interceptor Mission
EPSC Abstracts Vol. 15, EPSC2021-606, 2021 https://doi.org/10.5194/epsc2021-606 Europlanet Science Congress 2021 © Author(s) 2021. This work is distributed under the Creative Commons Attribution 4.0 License. The Comet Interceptor Mission Geraint Jones1,2, Colin Snodgrass3, Cecilia Tubiana4, and the The Comet Interceptor Team* 1Mullard Space Science Laboratory, University College London, Hombury St. Mary, Dorking RH5 6NT, UK ([email protected]) 2The Centre for Planetary Sciences at UCL/Birkbeck, London, UK 3University of Edinburgh, UK 4INAF-IAPS, Rome, Italy *A full list of authors appears at the end of the abstract Comets are undoubtedly extremely valuable scientific targets, as they largely preserve the ices formed at the birth of our Solar System. In June 2019, the multi-spacecraft project Comet Interceptor was selected by the European Space Agency, ESA, as its next planetary mission, and the first in its new class of Fast (F) projects [Snodgrass, C. and Jones, G. (2019) Nature Comms. 10, 5418]. The Japanese space agency, JAXA, will make a major contribution to Comet Interceptor. The mission’s primary science goal is to characterise, for the first time, a yet-to-be-discovered long- period comet (LPC), preferably one which is dynamically new, or an interstellar object. An encounter with a comet approaching the Sun for the first time will provide valuable data to complement that from all previous comet missions, which visited short period comets that have evolved over many close approaches to the Sun. The surface of Comet Interceptor’s LPC target will be being heated to temperatures above the its constituent ices’ sublimation point for the first time since its formation. -

SPACE : Obstacles and Opportunities
!"#$%$&'%()'*$ " '%(%)%'%%"('"('#" %(' ! "#$%&'!()* '! '!*%&! ! "*!%*)!* !% $! !* **!))$# *% !%!!!()* !"#$%&"! ! ))$#!&)!*%!#&! $$$%%!&!"%*%&)%'!#& )'%!* ! ! ( $* ! %'!))*'*'!"%)* '!+$#! '! "! (!$ !$ %!* !)% $!&#*%"! )$&!%!* ** $%!$ '#! $)"! (",+! -. // /0 !1**23! ! "!4%!* '"!!("!5 ! $$$%%!1$ '% '!4 %"3"!! "&)!&!6)$%!"%$'!$$ '!%!(("!* ** $%!$ '#! $)'! $$ '!%!((("!* **!!))$#!1 !))*'*'!"%)* 3! (7"!#$%)"! ! 5,8 ""0 ! 0!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! " !!!!!!!!!!!!!!!!!!!!!!!!!!!!!! 0 / 8! ! 0 8.! '* )*)$)!9))!4* *)!**$)$%%!"*%))$%'!,$)%!%!"%!"*%))$%!#& )'%! :%!13!* !4;,!"%%#!1)#* %3"!!#&!)*)$)! %))* !*$))!$$! *%))$%! *$$'* !* !#$ '!$$!%!<" $%!4;,!"%%#!() SPACE : Obstacles and Opportunities Rapporteur’s Report Alan Smith Canada -UK Colloquium, 19 -21 November 2015 The University of Strathclyde, Technology and Innovation Centre Glasgow Canada -UK Council School of Policy Studies, Queen’s University ii !"#$%&%'(&!$%'#) !"#$%&&#"'()* ' !"#$%&'()*% # %# # %#%*%#)%( ) %$( ()%($%%# %$%*( % #% ) %% $#% '$#$) !%"( % #%($" %)*% #"# % " '$)% #$ % $(%*)% % #% &#"# #% $ ($%% #)% '% &' #'% &)*% ! ) #"(#!% () $% )*% *% # % % )*% + #$% & #% !%$% #)% () % )*$"%% $) % ($% )*% ,)* "#$ % # % )*% #$% # ) * (( )% #$ % # % #$% ($ ) '$)% ($- )!% "( % # "% # % ($" % #% '($#-$% % )*$"%% " '$)% . #% $(%*)% *# # % $% + #$'% #$ % / (#$% #)""() 0'% 1)% '#$#%'$)% #$ % # ) * ( !% 2$% *% *% 1($ % $( ()% 3""%% $ $4 % 5""# % & #% &($% # #) '% ($(-#""% # % "# % % )) % * ( '%$)#""%'($%%( ) %#$ %"# %% # )'$)%.6**70!%2$%% *% # % '# % #% % % )) % * ( !% -

Book of Abstracts to Dowload
ABSTRACT BOOK 1 TABLE OF CONTENTS Summary ........................................................................................................................................... 5 Committees ......................................................................................................................................19 Agenda ............................................................................................................................................22 List of participants ............................................................................................................................ 25 Abstracts - Day 1 - Sessions 1-2 ...............................................................................................27 Solar system-exoplanet synergies - general approach and programmatic land-scape, Rauer Heike........................................................................................................................................................................28 Horizon 2061, from overarching science goal to specific science objectives, Michel Blanc...........................................................................................................................................................................29 Formation and Orbital Evolution of Young Planetary Systems, Baruteau Clément.....31 Composition and Interior structure of solar and extrasolar giant planets, Nettelmenn Nadine [et al.].......................................................................................................................................32 -

BPSC 2020 - Monday 13 January - AM
BPSC 2020 - Monday 13 January - AM 08:30 Registration 09:00 WELCOME - Colin Wilson Outer planet atmospheres Jupiter's tropical circulation revealed via Juno radiometry and ground-based 09:10 Leigh Fletcher Leicester University infrared spectroscopy Modelling Jupiter's Dynamic Weather Layer: Turbulence, Clouds & Moist 09:23 Peter Read Oxford University Convection Exploring Clouds and Composition of Ice Giants with Ground- and Space-Based 09:36 Patrick Irwin Oxford University Telescopes Using Visible/Near-IR Longitudinal Variations in the Stratosphere of Uranus from the Spitzer Infrared 09:49 Naomi Rowe-Gurney Leicester University Spectrometer Uranus and Neptune in the Mid-Infrared: Atmospheric Temperatures and 10:02 Michale Roman Leicester University Circulation Inferred from Thermal Imaging 10:15 Karen Aplin Bristol University Atmospheric Ionisation and Lightning at the Ice Giant Planets Temporal and Spectral Studies of Jupiter's X-Ray Aurorae with XMM-Newton 10:28 Affelia Wibisono UCL/MSSL During a Compression Event 10:41 Richard Haythornthwaite UCL/MSSL Fast and slow water ion populations in the Enceladus plume 10:55 COFFEE Atmospheres posters: authors in attendance Terrestrial Planet atmospheres Detecting Pre-Biosignatures in the Atmospheres of Earth-Like Planets around 11:25 Sarah Rugheimer Oxford University Other Stars Energetic and Thermodynamic Limits on Continental Silicate Weathering 11:38 Robert Graham Oxford University Strongly Impact the Habitability of Wet, Rocky Worlds Multiple Superrotating States in an Idealized Model -

Triennio 2020-2022, Le Attività Svolte, Quelle Da Realizzare (In Corso O Nuove), Definendo, Inoltre, Le Risorse Impiegate E Le Modalità Operative
Piano Triennale delle Attività 2020-2022 1 INTRODUZIONE E EXECUTIVE SUMMARY .............................................. 3 2 NORMATIVA E DOCUMENTI DI RIFERIMENTO ..................................... 6 3 STRATEGIE E POLITICHE INDUSTRIALI .................................................. 7 L’industria spaziale nazionale ............................................................................................................................ 7 La partecipazione italiana in ESA ...................................................................................................................... 9 La partecipazione ai programmi dell’Unione Europea .................................................................................. 10 Il Documento di Visione Strategica per Lo Spazio - DVSS ............................................................................ 16 L’integrazione dei documenti programmatici - Il Piano triennale della Performance ................................ 17 I rapporti con gli stakeholder ........................................................................................................................... 18 Benessere organizzativo, valorizzazione e politiche inclusive ........................................................................ 19 4 ATTIVITÀ PREVISTE NEL PERIODO 2020-2022 ...................................... 22 Telecomunicazioni, Osservazione della Terra e Navigazione (S1) ................................................................ 22 Studio dell’Universo (S2) .................................................................................................................................