Responsive Hydrogel Actuators Via 3D Printing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
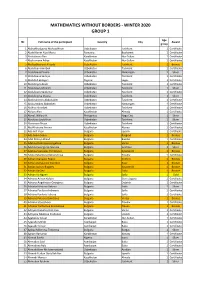
Mathematics Without Borders - Winter 2020 Group 1
MATHEMATICS WITHOUT BORDERS - WINTER 2020 GROUP 1 Age № Full name of the participant Country City Award group 1 Abboskhodjaeva Mohasalkhon Uzbekistan Tashkent 1 Certificate 2 Abdel Karim Alya Maria Romania Bucharest 1 Certificate 3 Abdraimov Alan Kazakhstan Nur-Sultan 1 Certificate 4 Abdraimova Adiya Kazakhstan Nur-Sultan 1 Certificate 5 Abdujabborova Alizoda Uzbekistan Tashkent 1 Bronze 6 Abdullaev Amirbek Uzbekistan Tashkent 1 Certificate 7 Abdullaeva Dinara Uzbekistan Namangan 1 Silver 8 Abdullaeva Samiya Uzbekistan Tashkent 1 Certificate 9 Abdullah Balogun Nigeria Lagos 1 Certificate 10 Abdullayev Azam Uzbekistan Tashkent 1 Certificate 11 Abdullayev Mirolim Uzbekistan Tashkent 1 Silver 12 Abdullayev Saidumar Uzbekistan Tashkent 1 Certificate 13 Abdullayeva Diyora Uzbekistan Tashkent 1 Silver 14 Abdurahimov Abduhakim Uzbekistan Tashkent 1 Certificate 15 Abduvosidov Abbosbek Uzbekistan Namangan 1 Certificate 16 Abidov Islombek Uzbekistan Tashkent 1 Certificate 17 Abiyev Alan Kazakhstan Almaty 1 Certificate 18 Abriol, Willary A. Philippines Naga City 1 Silver 19 Abrolova Laylokhon Uzbekistan Tashkent 1 Silver 20 Abrorova Afruza Uzbekistan Tashkent 1 Certificate 21 Abulkhairova Amina Kazakhstan Atyrau 1 Certificate 22 Ada Arif Vasvi Bulgaria Isperih 1 Certificate 23 Ada Selim Selim Bulgaria Razgrad 1 Bronze 24 Adel Dzheyn Brand Bulgaria Bansko 1 Certificate 25 Adelina Dobrinova Angelova Bulgaria Varna 1 Bronze 26 Adelina Georgieva Ivanova Bulgaria Svishtov 1 Silver 27 Adelina Svetoslav Yordanova Bulgaria Kyustendil 1 Bronze 28 Adina Zaharieva -

2010 Buenos Aires, Argentina
Claiming CME Credit To claim CME credit for your participation in the MDS 14th Credit Designation International Congress of Parkinson’s Disease and Movement The Movement Disorder Society designates this educational Disorders, International Congress participants must complete activity for a maximum of 35 AMA PRA Category 1 Credits™. and submit an online CME Request Form. This form will be Physicians should only claim credit commensurate with the available beginning June 15. extent of their participation in the activity. Instructions for claiming credit: If you need a Non-CME Certificate of Attendance, please tear • After June 15, visit the MDS Web site. out the Certificate in the back of this Program and write in • Log in after reading the instructions on the page. You will your name. need your International Congress File Number which is located on your name badge or e-mail The Movement Disorder Society has sought accreditation from [email protected]. the European Accreditation Council for Continuing Medical • Follow the on-screen instructions to claim CME Credit for Education (EACCME) to provide CME activity for medical the sessions you attended. specialists. The EACCME is an institution of the European • You may print your certificate from your home or office, or Union of Medical Specialists (UEMS). For more information, save it as a PDF for your records. visit the Web site: www.uems.net. Continuing Medical Education EACCME credits are recognized by the American Medical The Movement Disorder Society is accredited by the Association towards the Physician’s Recognition Award (PRA). Accreditation Council for Continuing Medical Education To convert EACCME credit to AMA PRA category 1 credit, (ACCME) to provide continuing medical education for contact the AMA online at www.ama-assn.org. -

Chapter 11 CORINTHIAN COLLEGES, INC., Et Al. Case
Case 15-10952-KJC Doc 712 Filed 08/05/15 Page 1 of 2014 IN THE UNITED STATES BANKRUPTCY COURT FOR THE DISTRICT OF DELAWARE In re: Chapter 11 CORINTHIAN COLLEGES, INC., et al.1 Case No. 15-10952-CSS Debtor. AFFIDAVIT OF SERVICE STATE OF CALIFORNIA } } ss.: COUNTY OF LOS ANGELES } SCOTT M. EWING, being duly sworn, deposes and says: 1. I am employed by Rust Consulting/Omni Bankruptcy, located at 5955 DeSoto Avenue, Suite 100, Woodland Hills, CA 91367. I am over the age of eighteen years and am not a party to the above-captioned action. 2. On July 30, 2015, I caused to be served the: a) Notice of (I) Deadline for Casting Votes to Accept or Reject the Debtors’ Plan of Liquidation, (II) The Hearing to Consider Confirmation of the Combined Plan and Disclosure Statement and (III) Certain Related Matters, (the “Confirmation Hearing Notice”), b) Debtors’ Second Amended and Modified Combined Disclosure Statement and Chapter 11 Plan of Liquidation, (the “Combined Disclosure Statement/Plan”), c) Class 1 Ballot for Accepting or Rejecting Debtors’ Chapter 11 Plan of Liquidation, (the “Class 1 Ballot”), d) Class 4 Ballot for Accepting or Rejecting Debtors’ Chapter 11 Plan of Liquidation, (the “Class 4 Ballot”), e) Class 5 Ballot for Accepting or Rejecting Debtors’ Chapter 11 Plan of Liquidation, (the “Class 5 Ballot”), f) Class 4 Letter from Brown Rudnick LLP, (the “Class 4 Letter”), ____________________________________________________________________________________________________________________________________________________________________________________________________________ 1 The Debtors in these cases, along with the last four digits of each Debtor’s federal tax identification number, are: Corinthian Colleges, Inc. -
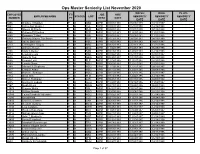
Ops Master Seniority List November 2020
Ops Master Seniority List November 2020 WN SLI DUAL FL ATL EMPLOYEE FT/ JOB HIRE EMPLOYEE NAME STATUS LOC SENIORITY SENIORITY SENIORITY NUMBER PT DESC DATE DATE DATE DATE 3456 Bradley J Madden F A ABQ OP01 09/08/1980 05/05/1979 10/18/1997 3061 Cathy Ann Wagner F A TUL OP01 03/03/1980 05/10/1980 12/14/1998 5152 Steven M Prouty F A PHX OP01 09/03/1982 08/01/1980 07/15/1998 3946 Anthony P Rambes F A ECP OP01 03/12/1981 11/09/1980 11/22/1996 4660 Dewayne T Hart F A LBB OP01 03/04/1982 10/06/1981 11/12/1996 5489 Anthony Wayne Tomlinson F A MAF OP01 01/16/1983 08/19/1982 04/29/1998 6326 Javier Ontiveros F A HOU OP01 11/03/1983 01/18/1983 04/01/1997 6223 Christopher Deguio F A ABQ OP01 09/22/1983 05/11/1983 11/22/1996 8011 Anthony Russo F A BNA OP01 11/02/1985 10/23/1983 06/25/1998 6108 Mark K Dexter F A SAN OP01 09/16/1983 12/02/1983 12/14/1998 4334 Erwin B Lewis F A OAK OP01 01/06/1982 05/11/1984 07/01/1997 9645 Gary W Toal F A GEG OP01 05/25/1987 03/18/1985 08/19/1998 8066 George Loya F A ELP OP01 12/16/1985 11/07/1985 07/30/1996 6863 Lonnie Glenn F A HOU OP01 05/09/1984 12/22/1985 10/29/1994 6388 Michael B Stephens F A HOU OP01 12/19/1983 12/22/1985 09/20/1995 8217 Craig D Arthur F A HOU OP01 03/15/1986 12/22/1985 09/08/1996 7905 Robert L Bettinger F A HOU OP01 08/13/1985 12/22/1985 01/31/1997 7114 Scott Wirt F A PHX OP01 07/14/1984 12/22/1985 12/14/1998 6922 Darren H Alcalay F I LAS OP01 05/28/1984 08/13/1986 04/09/1994 5255 Gordon R Ludwig F A GEG OP01 10/20/1982 09/16/1986 11/09/1997 7167 Hugh S Levi F A OGG OP01 08/13/1984 09/25/1986 -

Marathon Sofia 2017 Entry List
Marathon Sofia 2017 Entry List Last modification:2021/09/29 08:51 # First Name: Second Name: Country: Distance: Status: BIP 1 Georgi Yordanov Bulgaria 21 paid 1002 2 Grigor Todorov Bulgaria 21 paid 1003 3 Nikolay Opichkov Bulgaria 10 paid 3002 4 Vladimir VLADIMIROV Bulgaria 42 paid 102 5 Ivelin Tenev Bulgaria 10 paid 3003 6 Stefan Bratanov United Kingdom 42 paid 103 7 Velko Gerasimov Bulgaria 42 paid 104 8 Ventceslav Dimitrov Bulgaria 10 paid 3007 9 Nikolay Georgiev Bulgaria 42 paid 107 10 Georgi Kravaykov Bulgaria 21 paid 1004 11 Kaloyan Trifonov Bulgaria 3 free N/A 12 Nadya Petrova Bulgaria 10 paid 4005 13 Dragomir Draganov Bulgaria 42 paid 105 14 Bratislav Bratanov Bulgaria 10 paid 3005 15 Lyubomir Tsekov Bulgaria 10 paid 3004 16 Mariya Karagyozova Bulgaria 10 paid 4002 17 Maya Kerezieva Bulgaria 21 paid 2002 18 Laurens de Kort Netherlands 42 paid 106 19 Petya Slavchova Bulgaria 10 paid 4003 20 Viktor Metodiev Bulgaria 10 paid 3006 21 Nicole Tinto United Kingdom 21 paid 2003 22 sandor kovacs Hungary 21 paid 1005 23 Alberda Klaas Netherlands 42 paid 108 24 Antoniya Tomova Bulgaria 10 paid 4004 25 Veronica Milcheva Bulgaria 21 paid 2004 26 STAVROULA ASIMINARAPTI Greece 21 paid 2005 27 Todor Stoev Bulgaria 10 paid 3008 28 Tsenka Bobcheva Bulgaria 10 paid 4006 29 Dimitar Tonchev Bulgaria 10 paid 3009 30 Emma Toncheva Bulgaria 10 paid 4007 31 Martina Milkovska Bulgaria 42 paid 602 32 Christo Christov Bulgaria 42 paid 109 33 Ivan Stanchev Bulgaria 21 paid 1006 34 Ina Petrova Bulgaria 3 free N/A 35 Penio Penev Bulgaria 21 paid 1007 36 DANIEL -
2019 Basketball Guide.Pub
20182018----1919 DeKalb County Basketball Media Guide Columbia and Hall of Fame coach Dr. Phillip McCrary pointed towards 600th career victory in 2018-19. THE HOME OF STATE CHAMPIONS $2.00 DEKALB COUNTY BASKETBALL GUIDE 2018 -19 DEKALB COUNTY SCHOOL DISTRICT ATHLETIC DEPARTMENT 5829 Memorial Drive Stone Mountain, Georgia 30083 (678) 676 -1821 www.dekalb.k12.ga.us/athletics Directory SUPERINTENDENT Dr. R. Stephen Green EXECUTIVE DIRECTOR OF ATHLETICS James Jackson Basketball Coordinator Dr. Tekshia Ward -Smith ATHLETIC SPECIALIST Chris Chilton ATHLETIC SPECIALIST Mark Brock 2 DEKALB COUNTY’S LONG HISTORY OF STATE CHAMPIONS DeKalb County’s proud basketball history began and continues with a championship pedigree. The Clarkston boys brought home the first state trophy in 1940, and 41 other teams have since realized the big prize in the ensuing 76 years. From legendary coach Elmer Morrow ’s dominating boys teams at Druid Hills in the 1950s to the current boys powerhouses at Miller Grove and Columbia, the list of win- ners is an impressive one. Druid Hills knocked off Avondale (50 -44), Tifton (47 -44) and Jeff Davis (55 -42) in state finals in 1953, 1954 and 1957 respectively. Stone Mountain and Clarkston on the boys side, and Druid Hills and Stone Mountain among the girls served as the other early local powers. E.L. Rainey , another of DeKalb County’s original hoop coaching giants, led Stone Mountain to the Class B crown in 1957. Tom Church guided Clarkston to its second boys state championship with a victo- rious effort in the class B final in 1964. The girls matched the boys for the first time at Druid Hill in 1960, with Virginia Canady coaching that squad to the Class AAA title. -
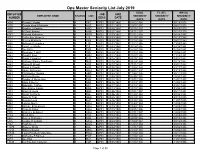
Master Seniority List
Ops Master Seniority List July 2019 DUAL FL ATL WN SLI EMPLOYEE JOB HIRE EMPLOYEE NAME STATUS LOC SENIORITY SENIORITY SENIORITY NUMBER DESC DATE DATE DATE DATE 3454 Ronald J Hudak A SAT OP01 09/07/1980 08/02/1998 07/18/1978 2600 Dennis Kreg Whiteside A AUS OP01 05/22/1979 03/05/1997 09/01/1978 3456 Bradley J Madden A ABQ OP01 09/08/1980 10/18/1997 05/05/1979 3466 M Scott Adams A AMA OP01 09/17/1980 09/11/1997 07/27/1979 4281 Richard Robinson A OGG OP01 11/09/1981 01/21/1998 04/04/1980 3061 Cathy Ann Wagner A TUL OP01 03/03/1980 12/14/1998 05/10/1980 5152 Steven M Prouty A PHX OP01 09/03/1982 07/15/1998 08/01/1980 3946 Anthony P Rambes A ECP OP01 03/12/1981 11/22/1996 11/09/1980 3065 Gary Len Shults A TUL OP01 03/03/1980 06/24/1995 02/24/1981 5286 Joe Fuzy A PHX OP01 11/03/1982 05/28/1998 07/05/1981 4660 Dewayne T Hart A LBB OP01 03/04/1982 11/12/1996 10/06/1981 3383 David E Peel A OMA OP01 07/11/1980 02/07/1995 11/19/1981 6185 David J Vasquez A ELP OP01 09/16/1983 04/15/1998 03/22/1982 5489 Anthony Wayne Tomlinson A MAF OP01 01/16/1983 04/29/1998 08/19/1982 6263 Danny R Wood I AUS OP01 10/17/1983 07/31/1997 09/01/1982 5737 Baron K Stovall A AUS OP01 05/05/1983 11/06/1998 01/17/1983 6326 Javier Ontiveros A HOU OP01 11/03/1983 04/01/1997 01/18/1983 6223 Christopher Deguio A ABQ OP01 09/22/1983 11/22/1996 05/11/1983 8011 Anthony Russo A BNA OP01 11/02/1985 06/25/1998 10/23/1983 5785 Gordon A Stevenson A PHX OP01 05/18/1983 12/01/1995 12/01/1983 6108 Mark K Dexter A SAN OP01 09/16/1983 12/14/1998 12/02/1983 6993 Edward L Trafton A SAT OP01 -

Local Ppp Round 2
Borrower Name Address City ZIP Current Approval AmountServicing Lender Jobs Reported WSB REHABILITATION SERVICES 510 W Main St Canfield 44406-1454 $2,000,000.00 Mid Penn Bank 239 HICKEY METAL FABRICATION AND ROOFING CO 873 Georgetown Rd 873 GeorgetownSalem Rd 44460-9710 $2,000,000.00 PNC Bank 171 LIBERTY STEEL INDUSTRIES INC. 2207 Larchmont Ave NE Warren 44483-2834 $2,000,000.00 Citizens Bank 146 COVELLI FAMILY LIMITED PARTNERSHIP III 3900 E Market St Warren 44484-4708 $2,000,000.00 Huntington National Bank 500 RAISING DOUGH NC LLC 3900 E Market St Warren 44484-4708 $2,000,000.00 Huntington National Bank 500 BRILEX TECH SERVICES INC. 1111 Crescent St Youngstown 44502-1360 $2,000,000.00 First National Bank of Pennsylvania 217 COMMUNITY BUS SERVICES INC. 11 Central Sq Ste 908 Youngstown 44503-1504 $2,000,000.00 First National Bank of Pennsylvania 264 THE DEARING COMPRESSOR AND PUMP COMPANY 3974 Simon Rd Youngstown 44512-1318 $2,000,000.00 First National Bank of Pennsylvania 199 CHESTNUT LAND COMPANY 7629 Market St Ste 200 Youngstown 44512-6082 $2,000,000.00 The Middlefield Banking Company 366 PENNSYLVANIA TOOL SALES & SERVICE INC. 625 Bev Rd Youngstown 44512-6421 $2,000,000.00 KeyBank National Association 205 HYNES INDUSTRIES INC. 3805 Hendricks Rd Youngstown 44515-1536 $2,000,000.00 JP Morgan Chase Bank 118 AVI FOOD SYSTEMS INC. 2590 Elm Rd NE Warren 44483-2997 $1,999,998.00 JP Morgan Chase Bank 300 BRT EXTRUSIONS INC 1818 N Main St N/A Niles 44446-1285 $1,982,068.00 Transportation Alliance Bank, Inc. -

English Versions of Foreign Names
ENGLISH VERSIONS OF FOREIGN NAMES Compiled by: Paul M. Kankula ( NN8NN ) at [email protected] in May-2001 Note: For non-profit use only - reference sources unknown - no author credit is taken or given - possible typo errors. ENGLISH Czech. French German Hungarian Italian Polish Slovakian Russian Yiddish Aaron Aron . Aaron Aron Aranne Arek Aron Aaron Aron Aron Aron Aron Aronek Aronos Abel Avel . Abel Abel Abele . Avel Abel Hebel Avel Awel Abraham Braha Abram Abraham Avram Abramo Abraham . Abram Abraham Bramek Abram Abrasha Avram Abramek Abrashen Ovrum Abrashka Avraam Avraamily Avram Avramiy Avarasha Avrashka Ovram Achilies . Achille Achill . Akhilla . Akhilles Akhilliy Akhylliy Ada . Ada Ada Ara . Ariadna Page 1 of 147 ENGLISH VERSIONS OF FOREIGN NAMES Compiled by: Paul M. Kankula ( NN8NN ) at [email protected] in May-2001 Note: For non-profit use only - reference sources unknown - no author credit is taken or given - possible typo errors. ENGLISH Czech. French German Hungarian Italian Polish Slovakian Russian Yiddish Adalbert Vojta . Wojciech . Vojtech Wojtek Vojtek Wojtus Adam Adam . Adam Adam Adamo Adam Adamik Adamka Adi Adamec Adi Adamek Adamko Adas Adamek Adrein Adas Adamok Damek Adok Adela Ada . Ada Adel . Adela Adelaida Adeliya Adelka Ela AdeliAdeliya Dela Adelaida . Ada . Adelaida . Adela Adelayida Adelaide . Adah . Etalka Adele . Adele . Adelina . Adelina . Adelbert Vojta . Vojtech Vojtek Adele . Adela . Page 2 of 147 ENGLISH VERSIONS OF FOREIGN NAMES Compiled by: Paul M. Kankula ( NN8NN ) at [email protected] in May-2001 Note: For non-profit use only - reference sources unknown - no author credit is taken or given - possible typo errors. ENGLISH Czech. French German Hungarian Italian Polish Slovakian Russian Yiddish Adelina . -

TRIO Mcnair/GSEF Roster
St. Olaf TRIO McNair Scholars & GSEF Program Roster Outside Funding + Summer Research/ Internship Experience Summer Research/ Internship Experience Class Last Name First Name Major (1) (2) Update 2023 Fernandez Brandon Biology 2023 Lor+ (GRADx) Seng Music 2023 Msuya Kina Biology Fatimoh 2023 Opakunle (Tosin) Econ Econ/ 2023 Perez Berenice Spanish 2023 Sanchez Stephanie Biology 2023 Tunks Samirah Psych/ SW Wieseler+ Music/Ed 2024 (GRADx) Blake /Spanish Willis+ English/Japa 2023 (GRADx) Seth nese Biology/Pre- 2023 Xiong Sha Med 2023 Youdon Tenzin Biology Antoniya 2023 Zheleva (Toni) Biology Aguilar Biology/Psy Summer Classes 2022 Ortega Fernando ch CURI/McNair Research Emily Mohl: Expanding the Milkweed Adapptation 2022 Anderson+ Ben Biology Research and Education Network Jocelyn Poli Sci/ CURI/McNair Research with Prof. Medina: 2022 Avila+ (Jossy) Spanish Caribbean Sts Network Garcia Poli Sci/ Svoboda Legal Scholars (Online) 2022 Torres Wendy SoAn LSAMP/McNair Research Norman Lee: Hope Dentistry Developing a multi-speaker array to 2022 Garfias+ Leslie Biology investigate insect hearing Exercise SSS Office Manager 2022 Guzman+ Mike Science Math & McNair Research with Alden Adolph: Impacts University of Washington Physics REU 2022 Karki Samip Physics EMTof Snow Evolution Allina Mixed ICU St. Paul, EMT, MN Dept 2022 Locken+ Autumn Nursing Health Contact Tracing (Spring) CURI/McNair Research with Jay Demas: Searching for a Magnetic Needle in a 2022 Lor Cha Physics Haystack McNair Research with Dr. Colin Harris: University of Iowa Biostats -

2013 Atlantic Cape Graduate List
2013 Atlantic Cape Graduate List ATLANTIC COUNTY Absecon Harli A. Arcieri Mark Assad Mark C. Barbetto, Jr. Jennifer Birkbeck Antonella Bonansea James Cincotti Elizabeth A. Conover Andrew P. Dailey Darshan P. Dave Andrew B. Dvorsky Paul S. Dzialo Leah F. Feldman Valeria A. Gonzalez Karla Guevara Thomas J. Hunt Howard S. Johnson Nirmit S. Kansagra Colin Daniel Kelly Nihan Komurcuogullari Jaime Lea LaPinta William LoDico William J. LoDico II Nicholas R. Mancinelli Tinelle McNulty Amanda M. Mitre-Lopez Courtney J. Murray Jennifer N. Robles Robert S. Speirs Valerie D. Torres Chel-Lei Twyman Kyra Welch Atlantic City Veronica A. Austin Ashley N. Biscardi Ardena Blake Madia M. Branch Jesus Bravo-Jauregui Quanda S. Brinson Tanisha Bryant Ells Buffaloe Shuping Chen Clarice N. Collette Rocio R. De la Paz Tram T. Dinh Fatumata Dolleh Omar Faroque Yi B. Feng Nathalia Garcia Michelle R. Green Latoya M. Hampton Dominic Handy Steven L. Hightower Sky Hu Bianca D. Jackson Keisha M. James Tracey Ann Johnson Cheryl I. Jones Lonnise H. Jones Tyrell Jones Vickie L. Jones Veronina Lee Xue Li Jan W. Luo Zsave’ C. Muhammad Isbah Mussaddiq Lisandra Q. Nguyen Christine Parker Evgeniya A. Pavlova Hanin M. Qammouh Rizwana Rashid Bianca L. Reynolds Karen Rios Kathleen M. Rizzo Jonmarshall M. Robinson Carlene L. Rush Elvira Rustamova Muzammil Said Jazmine M. Seney Bushra Shaheen Lynn M. To Jennifer Torres-Prado Takimah S. Toulson Giang T. Tran Lynda T. Tran Awilda Y. Valdez-Santana Jerry C. Wade Diana M. Weiner Juan J. Wiggins Raina M. Williams Sabrina N. Winters Anthony Woodard Robert C. Young, Jr. -

A Culture of Positivity
Finding God in All Things The Bishop O’Dowd High School Magazine A Culture of Positivity A Culture of Positivity, page 2 Transforming Lives Dinner, page 26 Winter 2017 Class of 2017 Endowment Fund, page 33 Charism Finding God in all things calls us to: Community in Diversity Strength of Character Academic Excellence Kinship with Creation Social Justice From the Joy Stephen Phelps, EdD PRESIDENT President James (J.D.) Childs, MA, MEd In the psychology class I taught during the fall semester, we completed a unit on Principal positive psychology, illuminating the behaviors and intellectual experiences that Susan Andres Director of Marketing enable individuals and human communities to thrive. We studied a concept known as the zone of proximal development. This concept in education underscores Romeo Baldeviso, MS Chief Information Officer the difference between what a learner can do without help and with help. Great Rebecca Bischoff teachers and coaches who make expert use of this concept motivate students and Chief Development Officer bring joy to their lives, generating cultures that produce excellence and continual Christine Garavaglia, CPA Chief Financial Officer growth. Michelle Hawkins Director of Development This issue of the Dragon stands in sharp contrast to the recently completed Brian Judd, MS Presidential campaign that was among the most negative and joyless in memory. Assistant Principal J.D. Childs’ lead article on page 5 speaks for all of us at O’Dowd as he applies the Briana Loewinsohn research on positivity and the values expressed in our Charism to everything we Graphic Designer do here. Joy is what happens when a school seeks to find God in everything we do Cathy McFann Director of Annual Giving and Special Events because God is love and joy.