A State-Of-The-Art Survey on Vehicular Mechatronics Focusing on By-Wire Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
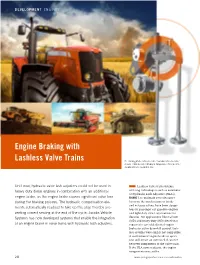
Engine Braking with Lashless Valve Trains
Engines DEVELOPMENT ENGINes Engine Braking with Lashless Valve Trains © Hanna_photo | iStock.com / narvikk | iStock.com / shauni | iStock.com / Maksym Dragunov | iStock.com / Jacobs Vehicle Systems, Inc. Until now, hydraulic valve lash adjusters could not be used in g Lashless valve train systems, heavy-duty diesel engines in combination with an additional utilizing technologies such as automatic or Hydraulic Lash Adjusters (HLAs), engine brake, as the engine brake causes signifcant valve lash FIGURE 1, to maintain zero-clearance during the braking process. The hydraulic compensation ele- between the mechanisms to intake ments automatically readjust to take up this play, thereby pre- and exhaust valves, have been ubiqui- tous in passenger car gasoline engines venting correct seating at the end of the cycle. Jacobs Vehicle and light-duty diesel applications for Systems has now developed systems that enable the integration decades. For applications like medium (MD) and heavy-duty (HD) diesel that of an engine brake in valve trains with hydraulic lash adjusters. require the use of dedicated engine brakes to aid in downhill control, lash- less systems were simply not compatible. A conventional engine brake in opera- tion will create an increased clearance between components of the valve train. If the HLA now readjusts, the engine components may suffer. 28 www.springerprofessional.com/automotive Engines AUTHORS (TCO) and lower Noise, Vibration and release event into the exhaust, and pre- Harshness (NVH) emitted by the valve vents the energy from going back to the train. The adoption of lashless valve crank during the expansion stroke. This trains with HLAs can allow the OEMs to “energy absorption” helps to slow the have more fexibility in valve lift design, loaded vehicle or maintain control on a which helps in meeting more stringent downhill grade without wear and tear or emission targets. -

A Review of Regenerative Braking Systems
This is a repository copy of A Review of Regenerative Braking Systems. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/2118/ Monograph: Clegg, S.J. (1996) A Review of Regenerative Braking Systems. Working Paper. Institute of Transport Studies, University of Leeds , Leeds, UK. Working Paper 471 Reuse See Attached Takedown If you consider content in White Rose Research Online to be in breach of UK law, please notify us by emailing [email protected] including the URL of the record and the reason for the withdrawal request. [email protected] https://eprints.whiterose.ac.uk/ White Rose Research Online http://eprints.whiterose.ac.uk/ Institute of Transport Studies University of Leeds This is an ITS Working Paper produced and published by the University of Leeds. ITS Working Papers are intended to provide information and encourage discussion on a topic in advance of formal publication. They represent only the views of the authors, and do not necessarily reflect the views or approval of the sponsors. White Rose Repository URL for this paper: http://eprints.whiterose.ac.uk/2118/ Published paper S.J. Clegg (1996) A Review of Regenerative Braking Systems. Institute of Transport Studies, University of Leeds, Working Paper 471 White Rose Consortium ePrints Repository [email protected] UNIVERSITY OF LEEDS Institute for Transport Studies ITS Working Paper 471 April 1996 A REVIEW OF REGENERATIVE BRAKING SYSTEMS DR. S J CLEGG ITS Working Papers are intended to provide information and encourage discussion on a topic in advance of formal publication. They represent only the views of the authors, and do not necessarily reflect the views or approval of the sponsors. -
Trailering Tips Power, Or If You Hear Unusual Engine Noises, Immediately Take These Following Steps: 1
Overheating: Prolonged driving with overheated fluids can cause damage to your vehicle. If temperature gauges register abnormally high, if there is a marked decrease in Trailering Tips power, or if you hear unusual engine noises, immediately take these following steps: 1. Pull your vehicle to the side of the road and leaving the Outdoor engine running. Once stopped, shift into park (automatic transmission) or neutral (manual Recreation transmission) and apply the parking brakes. Center 2. Turn off the air conditioning and other accessories to reduce the load on the engine. Roll down windows and turn the heater on to maximum and the fan to its highest setting. The heater core provides a second cooling surface that can help reduce engine temperatures. 3. If you suspect that the overheating is a result of climbing a long steep grade, run the engine at fast idle (around 1,500rpm) until the temperature gauge registers a normal reading. 4. Examine your vehicle. With the vehicle in park or neutral and the parking brake engaged and being mindful of traffic, exit your vehicle. Look for steam or leaking coolant underneath the engine. If you see either of these, shut the engine off and allow engine to cool. To avoid being burned, do not attempt to remove the radiator cap until engine has cooled. Parking On Grades: Parking on steep grades with a trailer is not recommended. If you must, follow this procedure: 1. Apply the brakes and shift into neutral. 2. Have someone block the trailer’s wheels on the downgrade side. 3. Release the brakes until the blocks absorb the load. -

Owners Manual
TO THE OWNER This Owner’s Manual has been prepared to provide you with important oper- ation, maintenance and safety information relating to your UD Trucks vehi- cle. We urge you and others operating the vehicle to carefully read this manual and follow the recommendations for operation, maintenance, and safety. Failure to follow these recommendations could result in serious injury or death to those riding in this vehicle or bystanders. This manual should be considered a permanent part of the vehicle and must be kept with the vehicle at all times. This Owner’s Manual should accompany the vehicle when sold to provide future owners and opera- tors with important operation, safety and maintenance information. The characteristics and functions of this vehicle make its driving and han- dling different from that of a car. Before operating your vehicle, familiarize yourself and others operating the vehicle with these differences. The Warranty and Service Booklet provided with each vehicle contains important information about warranty and service matters. Keep it with your vehicle at all times and present it to your authorized UD Trucks dealer or other service facility when service is required. When service or other assistance is required, consult your UD Trucks dealer. If you have a problem that has not been handled to your satisfaction, contact UD Trucks North America, Inc., 7900 National Service Road Greensboro, NC 27409. 1206-20710-K1 All rights reserved. Reproduction by any means, electronic or mechanical including photocopying, recording or by any information storage and retrieval system or translation in whole or part is not per- mitted without written authorization from UD Trucks Corporation. -

Modeling Torque Converter Characteristics in Automatic Drivelines: Lock-Up Clutch and Engine Braking Simulation
12PFL - 0362 Modeling Torque Converter Characteristics in Automatic Drivelines: Lock-up Clutch and Engine Braking Simulation Hadi Adibi Asl Ph.D. Candidate, Mechanical and Mechatronics Engineering, University of Waterloo Nasser Lashgarian Azad Assistant Professor, Systems Design Engineering, University of Waterloo John McPhee Professor, Systems Design Engineering, University of Waterloo Copyright © 2012 SAE International ABSTRACT A torque converter, which is a hydrodynamic clutch in automatic transmissions, transmits power from the engine shaft to the transmission shaft either by dynamically multiplying the engine torque or by rigidly coupling the engine and transmission shafts. The torque converter is a critical element in the automatic driveline, and it affects the vehicle’s fuel consumption and longitudinal dynamics. This paper presents a math-based torque converter model that is able to capture both transient and steady-state characteristics. The torque converter is connected to a mean-value engine model, transmission model, and longitudinal dynamics model in the MapleSim environment, which uses the advantages of an acausal modeling approach. A lock-up clutch is added to the torque converter model to improve the efficiency of the powertrain in higher gear ratios, and its effect on the vehicle longitudinal dynamics (forward velocity and acceleration) is studied. We show that the proposed model can capture the transition from the forward flow to the reverse flow operations during engine braking or coasting. The simulation results also show that the engine braking phenomenon (due to the flow reversal) can effectively assist the braking system to slow down the vehicle. INTRODUCTION The approach of powertrain modeling with physically meaningful parameters and equations, which is called physics-based modeling, gives a detailed view of powertrain components and operations. -

Regenerative Braking
REGENERATIVE BRAKING A regenerative brake is an apparatus, a device or system which allows a vehicle to recapture and store part of the kinetic energy that would otherwise be 'lost' to heat when braking. Braking systems Electrical Regenerative brakes are most commonly seen in electric or hybrid vehicles. Electric regenerative brakes descended from dynamic brakes (rheostatic brakes in the UK) which have been used on electric and diesel-electric locomotives and streetcars since the mid-20th century. In both systems, braking is accomplished by switching motors to act as generators that convert motion into electricity instead of electricity into motion. Traditional friction-based brakes must also be provided to be used when rapid, powerful braking is required. Mechanism Like conventional brakes, dynamic brakes convert energy to heat, but this is accomplished by passing the generated current through large banks of resistors that dissipate the energy. If designed appropriately, this heat can be used to warm the vehicle interior. When the energy is meant to be dissipated externally, largeradiator- like cowls can be employed to house the resistor banks. Electric railway vehicles feed recaptured energy back into the grid, while road vehicles store it for re-acceleration using flywheels, batteries, or capacitors. It is estimated that regenerative braking systems currently see 31.3% efficiency; however, the actual efficiency depends on numerous factors, such as the state of charge of the battery, how many wheels are equipped to use the regenerative braking system, and whether the topology used is parallel or serial in nature. It is usual (in railway use) to include a 'back-up' system such that friction braking is applied automatically if the connection to the power supply is lost. -

MOVING LARGE OBJECTS. Efficient MAN Crane Vehicles
MOVING LARGE OBJECTS. Efficient MAN crane vehicles. A REAL POWER HORSE. Today, cranes are indispensable helpers, making for convenience and efficiency in many sectors of industry and commerce. Equipment like this is always needed to shift the cargo on and off a low loader, for example. Trucks with front-mounted or rear-mounted cranes transport timber, carry building materials and generally make light of weighty matters as crane tippers or platforms for heavy-duty cranes. MAN offers the right vehicles for all these tasks, combining innovation with reliability, aimed at achieving maximum transport efficiency. MAN efficiency in transport ex works: experience it for yourself. www.truck.man 2 Content CONTENT. Vehicles for transporting building materials Page 4 Loading cranes Page 6 Crane tippers Page 8 MAN Modification Page 10 Driveline Page 12 Running gear Page 16 Driver assistance systems Page 18 Cabs Page 20 Engines Page 26 Chassis for traction applications Page 27 Some of the equipment illustrated in this brochure is not included in the series-production scope. Content 3 A GREAT WAY TO SEE THE SITES. The MAN chassis and tractor units for transporting building materials combine dynamic pulling power with superb driving characteristics and exemplary safety. As solo trucks, articulated trains, tippers, platform trucks or tractor-semitrailers: an MAN with front- or rear-mounted crane easily handles the A to Z of construction materials, from abutment sections and aluminium strip through to zinc-phosphate cement and Z-section steel. The specific weight and volume of the various materials vary widely, and pallet sizes and stacking heights also differ. -

2007 Chrysler Aspen: Engineering
Contact: Colin McBean Todd Goyer 2007 Chrysler Aspen Offers Unmatched Capability and Performance in a Premium Package Best-in-class V-8 power with fuel-saving MDS technology Best-in-class refinement Standard Electronic Stability Program (ESP) First-in-class Trailer Sway Control September 21, 2006, Auburn Hills, Mich. - The all-new 2007 Chrysler Aspen is engineered to deliver a confident, powerful, refined and highly capable driving experience, providing a new level of ride quality in the full-size SUV market. Power is delivered with efficiency, the ride is plush yet controlled, steering is crisp and direct, braking is strong and assured, and the cabin features best-in- class refinement. “We combined a superior suspension configuration with best-in-class power and capability to make the all-new 2007 Chrysler Aspen a unique offering in the luxury SUV market,” said Mike Donoughe, Vice President – Body-on-frame Product Team, Chrysler Group. “Adding to the formula, Chrysler Group’s fuel-saving Multi-displacement System (MDS) and flexible fuel technology provide Chrysler Aspen owners V-8 power with the fuel efficiency of smaller full- size SUVs.” Best-in-class Power With Fuel-saving Technology The all-new 2007 Chrysler Aspen provides best-in-class horsepower and torque with the towing and hauling capability of a large SUV and the fuel efficiency of smaller full-size SUVs. “With the most powerful engine in its class — the 5.7-liter HEMI ® V-8 — the all-new 2007 Chrysler Aspen delivers unrivaled capability and performance with fuel-saving MDS technology,” said Donoughe. “Impressive off-the-line acceleration combined with enough torque to tow 8,950 lbs., Chrysler Aspen is a premium SUV where beauty is backed with brawn.” The optional 5.7-liter HEMI V-8 engine — featuring Chrysler Group’s fuel-saving Multi-displacement System (MDS) — delivers best-in-class 335 horsepower and 370 lb.-ft. -
Application of Floating Pedal Regenerative Braking for a Rear-Wheel-Drive Parallel-Series Plug-In Hybrid Electric Vehicle with an Automatic Transmission
Dissertations and Theses 12-2016 Application of Floating Pedal Regenerative Braking for a Rear- Wheel-Drive Parallel-Series Plug-In Hybrid Electric Vehicle with an Automatic Transmission Dylan Lewis Lewton Follow this and additional works at: https://commons.erau.edu/edt Part of the Automotive Engineering Commons, and the Electro-Mechanical Systems Commons Scholarly Commons Citation Lewton, Dylan Lewis, "Application of Floating Pedal Regenerative Braking for a Rear-Wheel-Drive Parallel- Series Plug-In Hybrid Electric Vehicle with an Automatic Transmission" (2016). Dissertations and Theses. 307. https://commons.erau.edu/edt/307 This Thesis - Open Access is brought to you for free and open access by Scholarly Commons. It has been accepted for inclusion in Dissertations and Theses by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. APPLICATION OF FLOATING PEDAL REGENERATIVE BRAKING FOR A REAR- WHEEL-DRIVE PARALLEL-SERIES PLUG-IN HYBRID ELECTRIC VEHICLE WITH AN AUTOMATIC TRANSMISSION by Dylan Lewis Lewton A Thesis Submitted to the College of Engineering Department of Mechanical Engineering in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering Embry-Riddle Aeronautical University Daytona Beach, Florida December 2016 Acknowledgements First and foremost, I would like to thank my thesis advisor Dr. Currier for all his support and guidance throughout the completion of this thesis. Although there were several people that helped with this thesis, I would like to give a special thanks to Adam Szechy, Matthew Nelson, Abdulla Karmustaji, and Marc Compere. Adam for working closely with me to develop a full vehicle model that could be used for testing control algorithms before vehicle testing. -

1) Which of These Is Not a Type of Retarder? A) Electric B) Hydraulic C
1) Which of these is not a type of retarder? a) Electric b) Hydraulic c) Robotic 2) Trucks and buses are subject to certain laws, regulations and inspections. Which of these is true? a) County and city laws do not apply to trucks and buses engaged in interstate commerce b) Federal regulations apply only to trucks and buses driven at least 50 mph c) Laws and restrictions can vary from place to place 3) When approaching a bridge on a 2 lane road, you should: a) Drive in the center of the bridge b) Check the weight limit of the bridge c) Slow down to 25 mph on the bridge 4) Which of these statements is true? a) Most people are more alert at night than in the day b) Most hazards are easier to see at night than during the day c) Many heavy vehicle accidents occur between midnight and 6 am 5) Which of these statements about an inspection of suspension components is true? a) Distorted springs are safe as long as they are not broken b) Axle mounts should be checked at each point they are secured to the vehicles frame and axles c) Suspension components should be checked at all axles except for the following unit 6) You are checking your brakes and suspension system for a pre-trip inspection. Which of these statements is true? a) Just one missing leaf in a leaf spring is not dangerous b) Spring hangers that are cracked but still tight are not dangerous c) Brake shoes should not have oil, grease or brake fluid on them 7) Why may tourists be a hazard? a) They drive rented cars b) They may move slowly, change lanes unexpectedly or stop suddenly c) Police do not fine them 8) What keeps an engine cool in hot weather driving? a) Proper engine oil level b) Air conditioner use c) High speed driving in order to put more air into the radiator 9) Cargo inspection a) Is most often not the responsibility of the driver b) Should be performed after every break you take while driving c) Is needed only if hazardous material is being hauled 10) A vehicle is loaded with very little weight on the drive axle. -

Off-Road Driving
Off-Road Driving Off-Road Driving BEFORE YOU DRIVE . 161 BASIC OFF-ROAD TECHNIQUES . 161 AFTER DRIVING OFF-ROAD. 163 SERVICING REQUIREMENTS. 164 Driving Techniques DRIVING ON SOFT SURFACES & DRY SAND . 165 DRIVING ON SLIPPERY SURFACES (ice, snow, mud, wet grass). 165 CLIMBING STEEP SLOPES . 166 DESCENDING STEEP SLOPES . 167 TRAVERSING A SLOPE . 167 NEGOTIATING A ‘V’ SHAPED GULLY. 168 DRIVING IN EXISTING WHEEL TRACKS . 168 CROSSING A RIDGE . 168 CROSSING A DITCH . 168 WADING . 169 159 160 Off-Road Driving Off-Road Driving BEFOREOff-Road Driving YOU DRIVE BASIC OFF-ROAD TECHNIQUES Before venturing off-road, it is absolutely These basic driving techniques are an essential that inexperienced drivers become introduction to the art of off-road driving and do fully familiar with the vehicle's controls and not necessarily provide the information needed also study the off-road driving techniques to successfully cope with every single off-road described on the following pages. situation. We strongly recommend that owners who WARNING intend to drive off-road frequently, should seek Off-road driving can be hazardous. as much additional information and practical • Familiarise yourself with the experience as possible. recommended driving techniques in order Before driving off-road it is important that you to minimise risks to yourself, your vehicle check the condition of the wheels and tyres and AND your passengers. that the tire pressures are correct. Worn or • DO NOT take unnecessary risks and be incorrectly inflated tires will adversely affect the prepared for emergencies at all times. performance, stability and safety of the vehicle. Gear selection IMPORTANT On automatic models, with the main selector lever set at ‘D’, the gearbox automatically • Always wear a seat belt for personal provides the correct gear for the majority of protection in all off-road driving off-road conditions. -

Chapter 3 Braking Performance
CHAPTER 3 BRAKING PERFORMANCE - I ·7.-:_.. ABS test drive. (Photo courtesy ofRobert Bosch GmbH.) BASIC EQUATIONS The general equation for braking performance may be obtained from Newton's Second Law written for the x-direction. The forces on the vehicle are generally of the type shown in Figure 1.6. Then, NSL is: (3-1) where: W =Vehicle weight g =Gravitational acceleration Dx =- ax =Linear deceleration Fxf =Front axle braking force Fxr = Rear axle braking force J)1\ = A 'rodynarrli drag (.) I Jphill gradl· ( 'II!\I' I'l '.I{ \ BI{A K IN ' I'I ~ RI'O J{M/\N\I ;. H IN I ' A MI ' N'I I ,' ~ I II' VI ' I III 'I 1 I ' N!\MII ',: TIIl',IJOIlI a,lId (l'll l hfuk illf ' 1111 ' '( 'rillS ariSl: Irllfllih 'lll('(J"l: llflh ' brak 'S where: : 1 ~ llIl~ Wllllllllhllg rt.:si~ lall ," 'rr ' 'Is, h ';trill' I'd 'lion, and uriv 'lin' drags, A x =Distance traveled during the deceleration IIlllpr,'" 'IISIV ' :I1l ;dYSIS nllh' d <..:c ' Ieralion r<": l(uir 'S detai led knowledge of all Ill!'s ' l or' 'S a 'ling un Ihe vt.: hi ck, In the case where the deceleration is a full stop, then Vf is zero, and X is the stopping distance, SO. Then: ( 'cHlshml Deceleration y2 y2 SD=_o-= - ~- (3-6) Silllpi 'and fundamental relationships can be derived for the case where it 2 Fxt 2 Dx I/'> 1l' ,I SOII ;,lbl ' to assume that the forces acting on the vehicle will be constant M 1I111111 1'. ~1 ( 1~11 a ~rake application.