Relationship Between Allan Variances and Kalman Filter Parameters
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Modeling of Atomic Clock Performance and Detection of Abnormal Clock Behavior
WITH) STATES APARTMENT OF NBS TECHNICAL NOTE 636 COMMERCE PUBLICATION Modeling of Atomic Clock Performance and Detection of Abnormal Clock Behavior U.S. APARTMENT OF COMMERCE National Rureau loo Js U51S3 i<?9 3 NATIONAL BUREAU OF STANDARDS 1 The National Bureau of Standards was established by an act of Congress March 3, 1 901 . The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides: (1) a basis for the Nation's physical measure- ment system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to promote public safety. The Bureau consists of the Institute for Basic Standards, the Institute for Materials Research, the Institute for Applied Technology, the Center for Computer Sciences and Technology, and the Office for Information Programs. THE INSTITUTE FOR BASIC STANDARDS provides the central basis within the United States of a complete and consistent system of physical measurement; coordinates that system with measurement systems of other nations; and furnishes essential services leading to accurate and uniform physical measurements throughout the Nation's scien- tific community, industry, and commerce. The Institute consists of a Center for Radia- tion Research, an Office of Measurement Services and the following divisions: Applied Mathematics — Electricity — Mechanics — Heat — Optical Physics — -

Allan Variance Method for Gyro Noise Analysis Using Weighted Least
Optik 126 (2015) 2529–2534 Contents lists available at ScienceDirect Optik jo urnal homepage: www.elsevier.de/ijleo Allan variance method for gyro noise analysis using weighted least square algorithm a a a,∗ b Pin Lv , Jianye Liu , Jizhou Lai , Kai Huang a Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China b AVIC Shanxi Baocheng Aviation Instrument Ltd., Baoji 721006, China a r a t i b s c t l e i n f o r a c t Article history: The Allan variance method is an effective way of analyzing gyro’s stochastic noises. In the traditional Received 3 May 2014 implementation, the ordinary least square algorithm is utilized to estimate the coefficients of gyro noises. Accepted 9 June 2015 However, the different accuracy of Allan variance values violates the prerequisite of the ordinary least square algorithm. In this study, a weighted least square algorithm is proposed to address this issue. The Keywords: new algorithm normalizes the accuracy of the Allan variance values by weighting them according to their Inertial navigation relative quantitative relationship. As a result, the problem associated with the traditional implementation Allan variance method can be solved. In order to demonstrate the effectiveness of the proposed algorithm, gyro simulations are Weighted least square algorithm carried out based on the various stochastic characteristics of SRS2000, VG951 and CRG20, which are Gyro stochastic noises three different-grade gyros. Different least square algorithms (traditional and this proposed method) are Gyro performance evaluation applied to estimate the coefficients of gyro noises. The estimation results demonstrate that the proposed algorithm outperforms the traditional algorithm, in terms of the accuracy and stability. -

Using the Allan Variance and Power Spectral Density to Characterize DC Nanovoltmeters Thomas J
IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 50, NO. 2, APRIL 2001 445 Using the Allan Variance and Power Spectral Density to Characterize DC Nanovoltmeters Thomas J. Witt, Senior Member, IEEE Abstract—When analyzing nanovoltmeter measurements, sto- the noise is white, i.e., when the observations are independent chastic serial correlations are often ignored and the experimental and identically distributed, or, at least, over which the Allan vari- standard deviation of the mean is assumed to be the experimental ance decreases if the measurement time is extended. Such infor- standard deviation of a single observation divided by the square root of the number of observations. This is justified only for white mation is important when designing experiments. Furthermore, noise. This paper demonstrates the use of the power spectrum and knowledge of the minimum Allan variance achievable with a the Allan variance to analyze data, identify the regimes of white nanovoltmeter, and the time necessary to attain it, are useful noise, and characterize the performance of digital and analog dc specifications of the instrument. I nanovoltmeters. Limits imposed by temperature variations, Not surprisingly, it was found that, for low source resistances, noise and source resistance are investigated. the most important factor limiting precision is the stability of the Index Terms—Noise measurements, spectral analysis, time do- ambient temperature. This instigated an ancillary study of the main analysis, voltmeters, white noise. temperature coefficients of a number of nanovoltmeters. Sub- sequently the instruments were used in a temperature-stabilized I. INTRODUCTION enclosure, so that the next-greatest factor limiting the precision, HE experimental standard deviation of the mean is cor- noise, could be examined. -
Analysis of Laser Frequency Stability Using Beat-Note Measurement V1.1 09 2016
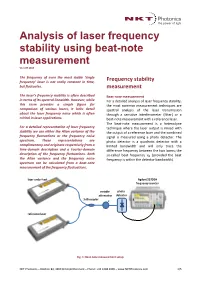
Analysis of laser frequency stability using beat-note measurement V1.1 09 2016 The frequency of even the most stable ‘single frequency’ laser is not really constant in time, Frequency stability but fluctuates. measurement The laser’s frequency stability is often described Beat-note measurement in terms of its spectral linewidth. However, while For a detailed analysis of laser frequency stability, this term provides a simple figure for the most common measurement techniques are comparison of various lasers, it lacks detail spectral analysis of the laser transmission about the laser frequency noise which is often through a sensitive interferometer (filter) or a critical in laser applications. beat-note measurement with a reference laser. The beat-note measurement is a heterodyne For a detailed representation of laser frequency technique where the laser output is mixed with stability we use either the Allan variance of the the output of a reference laser and the combined frequency fluctuations or the frequency noise signal is measured using a photo detector. The spectrum. These representations are photo detector is a quadratic detector with a complimentary and originate respectively from a limited bandwidth and will only trace the time-domain description and a Fourier-domain difference frequency between the two lasers; the description of the frequency fluctuations. Both so-called beat frequency 휈퐵 (provided the beat the Allan variance and the frequency noise frequency is within the detector bandwidth). spectrum can be calculated from a beat-note measurement of the frequency fluctuations. laser under test Agilent 53230A frequency counter variable photo attenuator detector 3 dB coupler reference laser Fig. -

Application Note
APPLICATION NOTE OSCILLATOR SHORT TERM STABILITY: (root) Allan Variance Normally, when trying to determine how tightly grouped a set of data is, the standard deviation (σ, or square root of variance, σ2) of that data is calculated. However, when making this calculation on a group of frequency measurements taken from an oscillator, long term stability variables (such as aging and ambient effects) can begin to obscure the short term stability of that oscillator. In this instance a calculation called Allan variance (named after David Allan of NIST) provides better results. Simply put, instead of calculating the variance for an entire set of data at once, the variances from progressing pairs of data points are averaged, minimizing non-short term factors. In practice, root Allan variance is used rather than Allan variance, and its equation is: Statistical rules apply, and at least 31 readings (corresponding to 30 successive pairs) should be taken. Also, there will be a distinct root Allan variance value for each gate time used to record the frequency data. An example of a root Allan variance specification might be: < 3x10-9/1 second. This states that the standard deviation of successive readings taken with 1 second gate times (not counting aging and ambient effects) should be less than 3x10-9 (fractional frequency movement). Note that there is a direct (albeit complex) relation between Allan variance and phase noise ( (ƒ)): Longer gate times used in measuring Allan variance correspond to smaller frequency offsets from the carrier, while shorter gate times correspond to larger frequency offsets from the carrier. The phase noise measurement system used has the capability to calculate root Allan variance from (ƒ). -
Allan Variance: Noise Analysis for Gyroscopes
Freescale Semiconductor Document Number: AN5087 APPLICATION NOTE Rev. 0, 2/2015 Allan Variance: Noise Analysis for Gyroscopes Contents 1 Introduction 1 Introduction ............................................... 1 2 Creating an Allan Deviation Plot for Noise Allan variance is a method of analyzing a Identification in a Gyroscope ................... 2 sequence of data in the time domain, to 2.1 . Calculate Allan Variance using Output measure frequency stability in oscillators. This Angles ................................................. 3 method can also be used to determine the 2.2 . Calculate Allan Variance Using intrinsic noise in a system as a function of the Averages of Output Rate Samples ....... 4 2.3 . Calculate Allan Deviation and Create an averaging time. The method is simple to Allan Deviation Plot .............................. 5 compute and understand, it is one of the most 3 Noise Identification ................................... 5 popular methods today for identifying and 4 References ................................................ 7 quantifying the different noise terms that exist in 5 Revision History........................................ 8 inertial sensor data. The results from this method are related to five basic noise terms appropriate for inertial sensor data. These are quantization noise, angle random walk, bias instability, rate random walk, and rate ramp. The Allan variance analysis of a time domain signal ( ) consists of computing its root Allan variance or Allan deviation as a function of Ω different averaging times and then analyzing the characteristic regions and log-log scale slopes of the Allan deviation curves to identify the different noise modes. Freescale Semiconductor, Inc. Creating an Allan Deviation Plot for Noise Identification in a Gyroscope 2 Creating an Allan Deviation Plot for Noise Identification in a Gyroscope The following describes the steps to be followed in order to create an Allan deviation plot. -

VARIANCE AS APPLIED to CRYSTAL OSCILLATORS We Need to Understand What a Variance Is, Or Is Trying to Achieve
VARIANCE AS APPLIED TO CRYSTAL OSCILLATOR S Before we can discuss VARIANCE AS APPLIED TO CRYSTAL OSCILLATORS we need to understand what a Variance is, or is trying to achieve. In simple terms a Variance tries to put a meaningful figure to ‘what we actually receive’ against ‘what we expect to receive’. It is, simply, a mathematical formula applied to a set of data points / samples / readings which are usually collected over a specified per iod of time. There are various 2 types of Variances, each tailored to suit a particular application. Variance is σ y , but the term Variance is also 2 used for √σy , it is up to the individual to interpret which is being quoted. Variance is only useful if it c onverges. Convergence means the more samples we take the closer the resulting Variance gets to a steady value. Non convergence means the Variance just gets bigger and bigger as we take more and more samples. An example of a converging Variance is the numb er of times the flip of a regular coin turns up heads. The more times we flip the coin the more likely the Variance is to converge to 0.25 (0.25 is 0.5 2). An example of a non converging Variance is the age of a person, the more data we collect the larger t he Variance gets, it is not heading for a steady value. This means we have to have an understanding of the underlying causes of the variability of the collected data before we can decide if a Variance will have any meaning. -

Extracting Dark Matter Signatures from Atomic Clock Stability Measurements
Extracting dark matter signatures from atomic clock stability measurements Tigran Kalaydzhyan∗ and Nan Yu Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Dr, MS 298, Pasadena, CA 91109, U.S.A. (Dated: September 22, 2017) We analyze possible effects of the dark matter environment on the atomic clock stability mea- surements. The dark matter is assumed to exist in a form of waves of ultralight scalar fields or in a form of topological defects (monopoles and strings). We identify dark matter signal signatures in clock Allan deviation plots that can be used to constrain the dark matter coupling to the Standard Model fields. The existing data on the Al+/Hg+ clock comparison are used to put new limits on −15 the dilaton dark matter in the region of masses mφ > 10 eV. We also estimate the sensitiv- ities of future atomic clock experiments in space, including the cesium microwave and strontium optical clocks aboard the International Space Station, as well as a potential nuclear clock. These experiments are expected to put new limits on the topological dark matter in the range of masses −10 −6 10 eV < mφ < 10 eV. PACS numbers: 95.35.+d, 06.30.Ft, 95.55.Sh INTRODUCTION and still being consistent with the astrophysical, cos- mological and gravitational tests. It is constructive to split the aforementioned mass range in two categories: Despite an overwhelming amount of cosmological and sub-eV and the rest. The latter is usually tested with astrophysical data suggesting the existence of dark mat- high-energy and scattering experiments [1], where typi- ter (DM), there is no confirmed direct detection of DM cal tested masses of DM particles, the so-called Weakly particles or fields up to the date, see Ref. -

Characterization of Frequency Stability: Analysis of the Modified Allan Variance and Properties of Its Estimate
IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. M-33, NO. 4, DECEMBER 1984 Copyright o 1984 IEEE. Reprinted, with permission, from IEEE Transactions on Instrumentation and Measurements, Vol. IM-33, No. 4, pp. 332-336, December 1984. Characterization of Frequency Stability: Analysis of the Modified Allan Variance and Properties of Its Estimate PAUL LESAGE AND THiOPHANE AYI AbrWuet-An anrlyticll e-xpnrrion for the modified AlIan variance is &en for each component of the model usuaIIy considered to describe the frequency or phue lluctuationc in frequency standardr The reIa- tion between the Allan variance and the modified AIIan variance is rpecifii and compared with that of a previou~~Iy pubIished anrlyrig Ihe uncertainty on the estimate of the modified AIIan variance c&u- Wed from a ftite ct of meuurement d8t.a is diu2us6ed. Manuscript received December 8,1983; revised February 17, 1984. The authors are with the Laboratoire de I’Horloge Atomique, Equipe de Recherche du CNRS, associie i I’Universit6 Paris-Sud, 91405 Orsay, France. TN-259 IEEE TRANSACTIONS ON INSTRUMENTATION AND YEASUREMENT, VOL. IM-33.NO.4,DECEMBER 1984 333 I. INTRODUCTION b h,(t) Many works [ 11 -[S ] have been devoted to the characteriza- tion of the frequency stability of ultrastable frequency sources and have shown that the frequency noise of a generator can be easily characterized by means of the “two-sample variance” (21 of frequency fluctuations, which is also known as the “Allan variance” [ 2] in the special case where the dead time between samples is zero. An algorithm for frequency measurements has been devel- Fig. -

Frequency Reference Stability and Coherence Loss in Radio Astronomy Interferometers Application to the SKA
Journal of Astronomical Instrumentation World Scientific Publishing Company Frequency Reference Stability and Coherence Loss in Radio Astronomy Interferometers Application to the SKA Bassem Alachkar1,2 , Althea Wilkinson1 and Keith Grainge1 1Jodrell Bank Centre for Astrophysics School of Physics & Astronomy University of Manchester Manchester, UK [email protected] Received (to be inserted by publisher); Revised (to be inserted by publisher); Accepted (to be inserted by publisher); The requirements on the stability of the frequency reference in the Square Kilometre Array (SKA), as a radio astronomy interferometer, are given in terms of maximum accepted degree of coherence loss caused by the instability of the frequency reference. In this paper we analyse the relationship between the characterisation of the instability of the frequency reference in the radio astronomy array and the coherence loss. The calculation of the coherence loss from the instability characterisation given by the Allan deviation is reviewed. Some practical aspects and limitations are analysed. Keywords: Radio Astronomy- Interferometry- Coherence Loss- Allan Deviation – Frequency Stability. 1. Introduction The basic principle of radio astronomy interferometry relies on combining the received signals of the array sensors in a coherent manner. To achieve good coherence of the array, the frequency references at the array sensors must be synchronised to a common reference. In a connected radio interferometry array, this can be achieved by a synchronised frequency dissemination system which delivers frequency reference signals to the receptors, (e.g. Schediwy et al., 2017 and Wang et al., 2015). The local frequency reference signals are used for sampling and/or for down-converting the frequency of the radio astronomy signals. -

Allan Variance of Time Series Models for Measurement Data
IOP PUBLISHING METROLOGIA Metrologia 45 (2008) 549–561 doi:10.1088/0026-1394/45/5/009 Allan variance of time series models for measurement data Nien Fan Zhang Statistical Engineering Division, National Institute of Standards and Technology, Gaithersburg, MD 20899, USA Received 10 April 2008 Published 23 September 2008 Online at stacks.iop.org/Met/45/549 Abstract The uncertainty of the mean of autocorrelated measurements from a stationary process has been discussed in the literature. However, when the measurements are from a non-stationary process, how to assess their uncertainty remains unresolved. Allan variance or two-sample variance has been used in time and frequency metrology for more than three decades as a substitute for the classical variance to characterize the stability of clocks or frequency standards when the underlying process is a 1/f noise process. However, its applications are related only to the noise models characterized by the power law of the spectral density. In this paper, from the viewpoint of the time domain, we provide a statistical underpinning of the Allan variance for discrete stationary processes, random walk and long-memory processes such as the fractional difference processes including the noise models usually considered in time and frequency metrology. Results show that the Allan variance is a better measure of the process variation than the classical variance of the random walk and the non-stationary fractional difference processes including the 1/f noise. 1. Introduction power spectral density given by In metrology, it is a common practice that the dispersion or 2 f(ω)= h ωα, standard deviation of the average of repeated measurements α (1) =− is calculated by the sample standard deviation of the α 2 measurements divided by the square root of the sample size. -

Package 'Avar'
Package ‘avar’ January 15, 2020 Type Package Title Allan Variance Version 0.1.1 Date 2020-01-15 LazyData true Maintainer Stéphane Guerrier <[email protected]> Description Implements the allan variance and allan variance linear regression estimator for la- tent time series models. More details about the method can be found, for example, in Guer- rier, S., Molinari, R., & Stebler, Y. (2016) <doi:10.1109/LSP.2016.2541867>. Depends R (>= 3.5.0) License AGPL-3 Imports Rcpp, stats, simts Suggests knitr, rmarkdown LinkingTo Rcpp, RcppArmadillo Encoding UTF-8 RoxygenNote 7.0.2 VignetteBuilder knitr URL https://github.com/SMAC-Group/avar BugReports https://github.com/SMAC-Group/avar/issues NeedsCompilation yes Author Stéphane Guerrier [aut, cre], James Balamuta [aut], Gaetan Bakalli [aut], Roberto Molinari [aut], Justin Lee [aut], Ahmed Radi [aut], Haotian Xu [aut], Yuming Zhang [aut], Nathanael Claussen [aut] Repository CRAN Date/Publication 2020-01-15 19:10:03 UTC 1 2 adis_av R topics documented: adis_av . .2 avlr .............................................3 av_ar1 . .5 av_dr ............................................6 av_qn ............................................7 av_rw ............................................8 av_wn............................................8 covmat_ar1blocks . .9 covmat_bi . 10 covmat_nswn . 11 fit_avlr . 12 imar_av . 12 kvh1750_av . 13 MOAV............................................ 14 navchip_av . 15 NOAV............................................ 15 plot.avar . 16 plot.avlr . 18 plot.imu_avar . 20 plot.imu_avlr . 21 print.avar . 22 summary.avar . 23 Index 24 adis_av Allan variance of IMU Data from an ADIS 16405 sensor Description This data set contains Allan variance of gyroscope and accelerometer data from an ADIS 16405 sensor. Usage adis_av Format A list of the following elements: • "sensor": Name of the sensor. • "freq": The frequency at which the error signal is measured.