Section 7.3. Braids and Bridges
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Directions for Knots: Reef, Bowline, and the Figure Eight
Directions for Knots: Reef, Bowline, and the Figure Eight Materials Two ropes, each with a blue end and a red end (try masking tape around the ends and coloring them with markers, or using red and blue electrical tape around the ends.) Reef Knot (square knot) 1. Hold the red end of the rope in your left hand and the blue end in your right. 2. Cross the red end over the blue end to create a loop. 3. Pass the red end under the blue end and up through the loop. 4. Pull, but not too tight (leave a small loop at the base of your knot). 5. Hold the red end in your right hand and the blue end in your left. 6. Cross the red end over and under the blue end and up through the loop (here, you are repeating steps 2 and 3) 7. Pull Tight! Bowline The bowline knot (pronounced “bow-lin”) is a loop knot, which means that it is tied around an object or tied when a temporary loop is needed. On USS Constitution, sailors used bowlines to haul heavy loads onto the ship. 1. Hold the blue end of the rope in your left hand and the red end in your right. 2. Cross the red end over the blue end to make a loop. 3. Tuck the red end up and through the loop (pull, but not too tight!). 4. Keep the blue end of the rope in your left hand and the red in your right. 5. Pass the red end behind and around the blue end. -

Categorified Invariants and the Braid Group
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 143, Number 7, July 2015, Pages 2801–2814 S 0002-9939(2015)12482-3 Article electronically published on February 26, 2015 CATEGORIFIED INVARIANTS AND THE BRAID GROUP JOHN A. BALDWIN AND J. ELISENDA GRIGSBY (Communicated by Daniel Ruberman) Abstract. We investigate two “categorified” braid conjugacy class invariants, one coming from Khovanov homology and the other from Heegaard Floer ho- mology. We prove that each yields a solution to the word problem but not the conjugacy problem in the braid group. In particular, our proof in the Khovanov case is completely combinatorial. 1. Introduction Recall that the n-strand braid group Bn admits the presentation σiσj = σj σi if |i − j|≥2, Bn = σ1,...,σn−1 , σiσj σi = σjσiσj if |i − j| =1 where σi corresponds to a positive half twist between the ith and (i + 1)st strands. Given a word w in the generators σ1,...,σn−1 and their inverses, we will denote by σ(w) the corresponding braid in Bn. Also, we will write σ ∼ σ if σ and σ are conjugate elements of Bn. As with any group described in terms of generators and relations, it is natural to look for combinatorial solutions to the word and conjugacy problems for the braid group: (1) Word problem: Given words w, w as above, is σ(w)=σ(w)? (2) Conjugacy problem: Given words w, w as above, is σ(w) ∼ σ(w)? The fastest known algorithms for solving Problems (1) and (2) exploit the Gar- side structure(s) of the braid group (cf. -

Knot Masters Troop 90
Knot Masters Troop 90 1. Every Scout and Scouter joining Knot Masters will be given a test by a Knot Master and will be assigned the appropriate starting rank and rope. Ropes shall be worn on the left side of scout belt secured with an appropriate Knot Master knot. 2. When a Scout or Scouter proves he is ready for advancement by tying all the knots of the next rank as witnessed by a Scout or Scouter of that rank or higher, he shall trade in his old rope for a rope of the color of the next rank. KNOTTER (White Rope) 1. Overhand Knot Perhaps the most basic knot, useful as an end knot, the beginning of many knots, multiple knots make grips along a lifeline. It can be difficult to untie when wet. 2. Loop Knot The loop knot is simply the overhand knot tied on a bight. It has many uses, including isolation of an unreliable portion of rope. 3. Square Knot The square or reef knot is the most common knot for joining two ropes. It is easily tied and untied, and is secure and reliable except when joining ropes of different sizes. 4. Two Half Hitches Two half hitches are often used to join a rope end to a post, spar or ring. 5. Clove Hitch The clove hitch is a simple, convenient and secure method of fastening ropes to an object. 6. Taut-Line Hitch Used by Scouts for adjustable tent guy lines, the taut line hitch can be employed to attach a second rope, reinforcing a failing one 7. -

Chinese Knotting
Chinese Knotting Standards/Benchmarks: Compare and contrast visual forms of expression found throughout different regions and cultures of the world. Discuss the role and function of art objects (e.g., furniture, tableware, jewelry and pottery) within cultures. Analyze and demonstrate the stylistic characteristics of culturally representative artworks. Connect a variety of contemporary art forms, media and styles to their cultural, historical and social origins. Describe ways in which language, stories, folktales, music and artistic creations serve as expressions of culture and influence the behavior of people living in a particular culture. Rationale: I teach a small group self-contained Emotionally Disturbed class. This class has 9- 12 grade students. This lesson could easily be used with a larger group or with lower grade levels. I would teach this lesson to expose my students to a part of Chinese culture. I want my students to learn about art forms they may have never learned about before. Also, I want them to have an appreciation for the work that goes into making objects and to realize that art can become something functional and sellable. Teacher Materials Needed: Pictures and/or examples of objects that contain Chinese knots. Copies of Origin and History of knotting for each student. Instructions for each student on how to do each knot. Cord ( ½ centimeter thick, not too rigid or pliable, cotton or hemp) in varying colors. Beads, pendants and other trinkets to decorate knots. Tweezers to help pull cord through cramped knots. Cardboard or corkboard piece for each student to help lay out knot patterns. Scissors Push pins to anchor cord onto the cardboard/corkboard. -
Learn to Braid a Friendship Bracelet
Learn to Braid a Friendship Bracelet Rapunzel braided her long hair, and you can use the same technique to make a beautiful bracelet for you or a friend. Adult supervision recommended for children under 8. You will need: Embroidery floss, yarn, or other lightweight string or cord Scissors Measuring tape Masking tape (optional) 1. To begin, measure around your wrist. To find out how long to cut each piece of string, double your wrist measurement For example, if your wrist is 6 inches around, add 6 inches to get 12 inches total. 2. Cut 3 pieces of your string using the total measurement you calculated (12 inches each in this example). They can all be the same color, or you can play with different color combinations. 3. Tie all 3 pieces together in a knot about 1.5-2 inches from one end. To hold the end in place, you can use masking tape to hold the knot down to a table. If you don’t have any masking tape handy, ask a family member to hold the knot so you can work on braiding. 4. To start braiding, spread the 3 strands out so they’re not crossed or tangled. (The photos here start in the middle of the braid, but the process is the same). Lift the strand on the far right (blue in the first photo) and cross it over the middle strand (red). Then lift the left strand (black) and cross it over the middle strand (now blue). 5. Repeat this sequence, continuing on by lifting the right strand (now red) to cross over the middle strand (now black). -

Tying the THIEF KNOT
Texas 4-H Natural Resources Program Knot Tying: Tying the THIEF KNOT The Thief Knot is one of the most interesting knots to teach people about. The Thief Knot is said to have been tied by Sailor’s who wanted a way to see if their Sea Bag was being tampered with. The crafty Sailor would tie the Thief Knot, which closely resembles the Square Knot, counting on a careless thief. The Thief Knot is tied much like the Square Knot, but the ends of the knot are at opposite ends. The careless thief, upon seeing what knot was tied in the Sailor’s sea bag, would tie the bag back with a regular Square Knot alerting the Sailor his bag had been rummaged through. The Thief Knot, while more of a novelty knot, does have its purpose if you’re trying to fool thieves… I guess it’s safe to say it was the original tamper evident tape. Much like the Square Knot, the Thief Knot should NOT be relied upon during a critical situation where lives are at risk! Also, the Thief Knot is even more insecure than the Square Knot and will also slip if not under tension or when tied with Nylon rope. Uses: The Thief Knot is not typically tied by mistake, unlike the Square Knot which can yield a Granny Knot. Indication of tampering Some similar Square Knot uses (Remember this is more insecure!) Impressing your friends at parties Instructions: Hold the two ends of the rope in opposite hands Form a bight (curved section of rope) with your left hand where the end points towards the top of the loop Pass the right end in and around the back of the bight Continue threading the right end back over the bight and back through it The right end should now be parallel with its starting point Grasp both ends of the right and left sides and pull to tighten Check the knot to ensure that you have the working ends of the knot pointing in opposite directions Texas 4-H Youth Development Program 4180 State Highway 6 College Station, Texas, 77845 Tel. -

Integration of Singular Braid Invariants and Graph Cohomology
TRANSACTIONS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 350, Number 5, May 1998, Pages 1791{1809 S 0002-9947(98)02213-2 INTEGRATION OF SINGULAR BRAID INVARIANTS AND GRAPH COHOMOLOGY MICHAEL HUTCHINGS Abstract. We prove necessary and sufficient conditions for an arbitrary in- variant of braids with m double points to be the “mth derivative” of a braid invariant. We show that the “primary obstruction to integration” is the only obstruction. This gives a slight generalization of the existence theorem for Vassiliev invariants of braids. We give a direct proof by induction on m which works for invariants with values in any abelian group. We find that to prove our theorem, we must show that every relation among four-term relations satisfies a certain geometric condition. To find the relations among relations we show that H1 of a variant of Kontsevich’s graph complex vanishes. We discuss related open questions for invariants of links and other things. 1. Introduction 1.1. The mystery. From a certain point of view, it is quite surprising that the Vassiliev link invariants exist, because the “primary obstruction” to constructing them is the only obstruction, for no clear topological reason. The idea of Vassiliev invariants is to define a “differentiation” map from link invariants to invariants of “singular links”, start with invariants of singular links, and “integrate them” to construct link invariants. A singular link is an immersion S1 S3 with m double points (at which the two tangent vectors are not n → parallel) and no other singularities. Let Lm denote the free Z-module generated by isotopy` classes of singular links with m double points. -
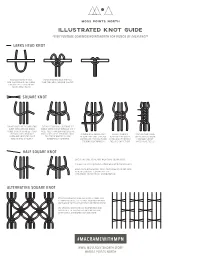
Illustrated Knot Guide *Visit Youtube.Com/Mosspointsnorth for Videos of Each Knot*
ILLUSTRATED KNOT GUIDE *VISIT YOUTUBE.COM/MOSSPOINTSNORTH FOR VIDEOS OF EACH KNOT* LARKS HEAD KNOT FOLD EACH CORD IN HALF, REACH FROM THE BACK AND PULL TAKE THE MIDDLE OF THE FOLDED YOUR CORD ENDS THROUGH THE LOOP CORD AND LAY IT OVER THE BAR YOU’RE ATTACHING TO SQUARE KNOT SQUARE KNOTS ARE TIED WITH TWO THE RIGHT CORD WILL GO BEHIND THE OUTER CORDS AROUND MIDDLE MIDDLE CORDS AND UP THROUGH THE ‘4 CORDS. START WITH THE LEFT CORD HOLE’. PULL IT THROUGH AND SLIDE THE CROSSING OVER THE MIDDLE KNOT TO THE TOP OF THE INNER CORDS. COMPLETE THE SQUARE KNOT THE LEFT CORD WILL YOU CAN COUNT THESE CORDS AND UNDER THE RIGHT TIGHTEN THE KNOT BY PULLING BY DOING THE SAME STEPS BUT GO BEHIND THE MIDDLE SIDE NOTCHES TO KNOW CORD TO MAKE A FIGURE 4 HORIZONTALLY OUTWARDS STARTING WITH THE RIGHT CORD CORDS AND UP THROUGH HOW MANY SQUARE CREATING A BACKWARDS 4 THE HOLE ON THE RIGHT KNOTS YOU’VE TIED (3) HALF SQUARE KNOT EXACTLY THE SAME AS THE FIRST HALF OF THE SQUARE KNOT! THIS WILL CAUSE YOUR KNOTS TO SPIRAL AROUND THE INNER CORDS WHEN YOU’VE DONE ABOUT 5 KNOTS, ADJUST THE SPIRAL AND START WITH THE CORD THAT IS ON THE LEFT SIDE (VIEW ONLINE VIDEO FOR FULL DEMONSTRATION) ALTERNATING SQUARE KNOT TYPICAL SQUARE KNOTS ARE TIED USING 4 CORDS, FOR ALTERNATING KNOTS, USE 2 CORDS FROM NEIGHBORING KNOTS ABOVE TO TIE A SQUARE KNOT UNDERNEATH THEM. THE ORIGINAL INNER CORDS OF NEIGHBORING KNOT GROUPS WILL TIE THE KNOT AROUND THE ORIGINAL OUTER CORDS, ALTERNATING BACK AND FORTH. -

Braid Groups
Braid Groups Jahrme Risner Mathematics and Computer Science University of Puget Sound [email protected] 17 April 2016 c 2016 Jahrme Risner GFDL License Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front- Cover Texts, and no Back-Cover Texts. A copy of the license is included in the appendix entitled \GNU Free Documentation License." Introduction Braid groups were introduced by Emil Artin in 1925, and by now play a role in various parts of mathematics including knot theory, low dimensional topology, and public key cryptography. Expanding from the Artin presentation of braids we now deal with braids defined on general manifolds as in [3] as well as several of Birman' other works. 1 Preliminaries We begin by laying the groundwork for the Artinian version of the braid group. While braids can be dealt with using a number of different representations and levels of abstraction we will confine ourselves to what can be called the geometric braid groups. 3 2 2 Let E denote Euclidean 3-space, and let E0 and E1 be the parallel planes with z- coordinates 0 and 1 respectively. For 1 ≤ i ≤ n, let Pi and Qi be the points with coordinates (i; 0; 1) and (i; 0; 0) respectively such that P1;P2;:::;Pn lie on the line y = 0 in the upper plane, and Q1;Q2;:::;Qn lie on the line y = 0 in the lower plane. -

Introduction to Braid Groups Joshua Lieber VIGRE REU 2011 University of Chicago
Introduction to Braid Groups Joshua Lieber VIGRE REU 2011 University of Chicago ABSTRACT. This paper is an introduction to the braid groups in- tended to familiarize the reader with the basic definitions of these mathematical objects. First, the concepts of the Fundamental Group of a topological space, configuration space, and exact sequences are briefly defined, after which geometric braids are discussed, followed by the definition of the classical (Artin) braid group and a few key results concerning it. Finally, the definition of the braid group of an arbitrary manifold is given. Contents 1. Geometric and Topological Prerequisites 1 2. Geometric Braids 4 3. The Braid Group of a General Manifold 5 4. The Artin Braid Group 8 5. The Link Between the Geometric and Algebraic Pictures 10 6. Acknowledgements 12 7. Bibliography 12 1. Geometric and Topological Prerequisites Any picture of the braid groups necessarily follows only after one has discussed the necessary prerequisites from geometry and topology. We begin by discussing what is meant by Configuration space. Definition 1.1 Given any manifold M and any arbitrary set of m points in that manifold Qm, the configuration space Fm;nM is the space of ordered n-tuples fx1; :::; xng 2 M − Qm such that for all i; j 2 f1; :::; ng, with i 6= j, xi 6= xj. If M is simply connected, then the choice of the m points is irrelevant, 0 ∼ 0 as, for any two such sets Qm and Qm, one has M − Qm = M − Qm. Furthermore, Fm;0 is simply M − Qm for some set of M points Qm. -

What Is a Braid Group? Daniel Glasscock, June 2012
What is a Braid Group? Daniel Glasscock, June 2012 These notes complement a talk given for the What is ... ? seminar at the Ohio State University. Intro The topic of braid groups fits nicely into this seminar. On the one hand, braids lend themselves immedi- ately to nice and interesting pictures about which we can ask (and sometimes answer without too much difficulty) interesting questions. On the other hand, braids connect to some deep and technical math; indeed, just defining the geometric braid groups rigorously requires a good deal of topology. I hope to convey in this talk a feeling of how braid groups work and why they are important. It is not my intention to give lots of rigorous definitions and proofs, but instead to draw lots of pictures, raise some interesting questions, and give some references in case you want to learn more. Braids A braid∗ on n strings is an object consisting of 2n points (n above and n below) and n strings such that i. the beginning/ending points of the strings are (all of) the upper/lower points, ii. the strings do not intersect, iii. no string intersects any horizontal line more than once. The following are braids on 3 strings: We think of braids as lying in 3 dimensions; condition iii. is then that no string in the projection of the braid onto the page (as we have drawn them) intersects any horizontal line more than once. Two braids on the same number of strings are equivalent (≡) if the strings of one can be continuously deformed { in the space strictly between the upper and lower points and without crossing { into the strings of the other. -

Dehornoy's Ordering on the Braid Group and Braid
Algebra i analiz St. Petersburg Math. J. Tom. 15 (2003), vyp. 3 Vol. 15 (2004), No. 3, Pages 437{448 S 1061-0022(04)00816-7 Article electronically published on March 30, 2004 DEHORNOY'S ORDERING ON THE BRAID GROUP AND BRAID MOVES A. V. MALYUTIN AND N. YU. NETSVETAEV Abstract. In terms of Dehornoy's ordering on the braid group Bn, restrictions are found that prevent us from performing the Markov destabilization and the Birman{ Menasco braid moves. As a consequence, a sufficient condition is obtained for the link represented by a braid to be prime, and it is shown that all braids in Bn that are not minimal lie in a finite interval of Dehornoy's ordering. Introduction 0.1. It is known that any classical link in R3 is representable by a closed braid, and the set of such closed braids is infinite. By a braid move we mean the passage from a closed braid βb to another closed braid representing the same link as βb. Many essential results of the theory of braids and links are related to the moves of stabilization and destabilization introduced by Markov, as well as to the \exchange move" and the \flype" defined by Birman and Menasco. While stabilization can always be performed, the other moves mentioned above do not apply to some braids. 0.2. In the present paper, we establish some restrictions on the possibility of performing braid moves; the restrictions are formulated in terms of Dehornoy's ordering. Combin- ing them with the known results concerning such transformations, we obtain conditions sufficient for the primeness of the link represented by a braid (these conditions are also formulated in terms of Dehornoy's ordering) and prove that there exists a similar criterion of the minimality of a braid.