Modelling with Implicit Surfaces That Interpolate
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Unifying Parametric and Implicit Surface Representations for Computer Graphics: Parametric Surface Display and Algebraic Surface Fitting
Purdue University Purdue e-Pubs Department of Computer Science Technical Reports Department of Computer Science 1990 Unifying Parametric and Implicit Surface Representations for Computer Graphics: Parametric Surface Display and Algebraic Surface Fitting Changrajit L. Bajaj Report Number: 90-995 Bajaj, Changrajit L., "Unifying Parametric and Implicit Surface Representations for Computer Graphics: Parametric Surface Display and Algebraic Surface Fitting" (1990). Department of Computer Science Technical Reports. Paper 846. https://docs.lib.purdue.edu/cstech/846 This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. UNWYING PARAMETRIC AND IMPLICIT SURFACE REPRESENTATIONS FOR COMPUTER GRAPIDCS: PARAl\ffiTRIC SURFACE DISPLAY AND ALGEnRAIC SURFACEFI1TING Ch:lIldl"lljit L. ll11jllj CSD TR-995 July 1990 Unifying Parametric and Implicit Surface Representations for Computer Graphics: Parametric Surface Display and Algebraic Surface Fitting Chandcrjit Bajaf Department of Computer Science Purdue University West Lafayette, IN 47907 Abstract These are brief survey notes on recent progress in topics dealing with rational surface display aod surface fitting with piecewise algebraic surface patches. It is hoped thai the reader shall delve deeper into specific technical results, by tracking the numerous citations to references provided. Several pictures (unfortnnately grey scale images) are included to illustrate the results of certain algorithms. These notes arc part of a course to be taught at this year's Siggraph 1990. Slides of the course arc also included in the appendix. 'Supported in part by NSF granl D~lS 88-16286 and aNR conlrad NOOOH-88-K-0402 1 1 Introduction Rationality of the algebraic curve or surface is a. -

Efficient Rasterization of Implicit Functions
Efficient Rasterization of Implicit Functions Torsten Möller and Roni Yagel Department of Computer and Information Science The Ohio State University Columbus, Ohio {moeller, yagel}@cis.ohio-state.edu Abstract Implicit curves are widely used in computer graphics because of their powerful fea- tures for modeling and their ability for general function description. The most pop- ular rasterization techniques for implicit curves are space subdivision and curve tracking. In this paper we are introducing an efficient curve tracking algorithm that is also more robust then existing methods. We employ the Predictor-Corrector Method on the implicit function to get a very accurate curve approximation in a short time. Speedup is achieved by adapting the step size to the curvature. In addi- tion, we provide mechanisms to detect and properly handle bifurcation points, where the curve intersects itself. Finally, the algorithm allows the user to trade-off accuracy for speed and vice a versa. We conclude by providing examples that dem- onstrate the capabilities of our algorithm. 1. Introduction Implicit surfaces are surfaces that are defined by implicit functions. An implicit functionf is a map- ping from an n dimensional spaceRn to the spaceR , described by an expression in which all vari- ables appear on one side of the equation. This is a very general way of describing a mapping. An n dimensional implicit surfaceSpR is defined by all the points inn such that the implicit mapping f projectspS to 0. More formally, one can describe by n Sf = {}pp R, fp()= 0 . (1) 2 Often times, one is interested in visualizing isosurfaces (or isocontours for 2D functions) which are functions of the formf ()p = c for some constant c. -

Parametric & Implicit Surfaces
3D Object Representations • Points • Solids o Range image o Voxels o Point cloud o BSP tree Parametric & Implicit o CSG Sweep Surfaces • Surfaces o o Polygonal mesh Thomas Funkhouser o Subdivision • High-level structures Princeton University o Parametric o Scene graph Implicit Application specific COS 426, Spring 2007 o o Surfaces Parametric Surfaces • What makes a good surface representation? • Boundary defined by parametric functions: o Accurate o x = fx(u,v) o Concise o y = fy(u,v) o Intuitive specification o z = fz(u,v) y o Local support o Affine invariant Parametric functions v define mapping from o Arbitrary topology (u,v) to (x,y,z): v o Guaranteed continuity o Natural parameterization x o Efficient display u Efficient intersections u o z H&B Figure 10.46 FvDFH Figure 11.42 Parametric Surfaces Parametric Surfaces • Boundary defined by parametric functions: • Example: surface of revolution o x = fx(u,v) o Take a curve and rotate it about an axis o y = fy(u,v) o z = fz(u,v) • Example: ellipsoid x = r cos φ cos θ = x φ θ y ry cos sin = φ z rz sin H&B Figure 10.10 Demetri Terzopoulos 1 Parametric Surfaces Parametric Surfaces • Example: swept surface • How do we describe arbitrary smooth surfaces o Sweep one curve along path of another curve with parametric functions? Demetri Terzopoulos H&B Figure 10.46 Piecewise Polynomial Parametric Surfaces Parametric Patches • Surface is partitioned into parametric patches: • Each patch is defined by blending control points Same ideas as parametric splines! Same ideas as parametric curves! Watt -
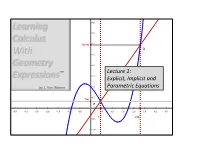
Lecture 1: Explicit, Implicit and Parametric Equations
4.0 3.5 f(x+h) 3.0 Q 2.5 2.0 Lecture 1: 1.5 Explicit, Implicit and 1.0 Parametric Equations 0.5 f(x) P -3.5 -3.0 -2.5 -2.0 -1.5 -1.0 -0.5 0.5 1.0 1.5 2.0 2.5 3.0 3.5 x x+h -0.5 -1.0 Chapter 1 – Functions and Equations Chapter 1: Functions and Equations LECTURE TOPIC 0 GEOMETRY EXPRESSIONS™ WARM-UP 1 EXPLICIT, IMPLICIT AND PARAMETRIC EQUATIONS 2 A SHORT ATLAS OF CURVES 3 SYSTEMS OF EQUATIONS 4 INVERTIBILITY, UNIQUENESS AND CLOSURE Lecture 1 – Explicit, Implicit and Parametric Equations 2 Learning Calculus with Geometry Expressions™ Calculus Inspiration Louis Eric Wasserman used a novel approach for attacking the Clay Math Prize of P vs. NP. He examined problem complexity. Louis calculated the least number of gates needed to compute explicit functions using only AND and OR, the basic atoms of computation. He produced a characterization of P, a class of problems that can be solved in by computer in polynomial time. He also likes ultimate Frisbee™. 3 Chapter 1 – Functions and Equations EXPLICIT FUNCTIONS Mathematicians like Louis use the term “explicit function” to express the idea that we have one dependent variable on the left-hand side of an equation, and all the independent variables and constants on the right-hand side of the equation. For example, the equation of a line is: Where m is the slope and b is the y-intercept. Explicit functions GENERATE y values from x values. -
Polygon Meshes and Implicit Surfaces
Polygon Meshes and Implicit Surfaces PPoollyyggoonn MMeesshheess PPaarraammeettrriicc SSuurrffaacceess IImmpplliicciitt SSuurrffaacceess CCoonnssttrruuccttiivvee SSoolliidd GGeeoommeettrryy 10/01/02 Modeling Complex Shapes • We want to build models of very complicated objects • An equation for a sphere is possible, but how about an equation for a telephone, or a face? • Complexity is achieved using simple pieces – polygons, parametric surfaces, or implicit surfaces • Goals – Model anything with arbitrary precision (in principle) – Easy to build and modify – Efficient computations (for rendering, collisions, etc.) – Easy to implement (a minor consideration...) 2 What do we need from shapes in Computer Graphics? • Local control of shape for modeling • Ability to model what we need • Smoothness and continuity • Ability to evaluate derivatives • Ability to do collision detection • Ease of rendering No one technique solves all problems 3 Curve Representations Polygon Meshes Parametric Surfaces Implicit Surfaces 4 Polygon Meshes • Any shape can be modeled out of polygons – if you use enough of them… • Polygons with how many sides? – Can use triangles, quadrilaterals, pentagons, … n- gons – Triangles are most common. – When > 3 sides are used, ambiguity about what to do when polygon nonplanar, or concave, or self- intersecting. • Polygon meshes are built out of – vertices (points) edges – edges (line segments between vertices) faces – faces (polygons bounded by edges) 5 vertices Polygon Models in OpenGL • for faceted shading • for smooth shading -

Transversal Intersection of Hypersurfaces in R^ 5
TRANSVERSAL INTERSECTION CURVES OF HYPERSURFACES IN R5 a b c d, Mohamd Saleem Lone , O. Al´essio , Mohammad Jamali , Mohammad Hasan Shahid ∗ aCentral University of Jammu, Jammu, 180011, India. bUniversidade Federal do Triangulo˙ Mineiro-UFTM, Uberaba, MG, Brasil cDepartment of Mathematics, Al-Falah University, Haryana, 121004, India dDepartment of Mathematics, Jamia Millia Islamia, New Delhi-110 025, India Abstract In this paper we present the algorithms for calculating the differential geometric properties t,n,b1,b2,b3,κ1,κ2,κ3,κ4 , geodesic curvature and geodesic torsion of the transversal inter- { } section curve of four hypersurfaces (given by parametric representation) in Euclidean space R5. In transversal intersection the normals of the surfaces at the intersection point are linearly inde- pendent, while as in nontransversal intersection the normals of the surfaces at the intersection point are linearly dependent. Keywords: Hypersurfaces, transversal intersection, non-transversal intersection. 1. Introduction The surface-surface intersection problem is a fundamental process needed in modeling shapes in CAD/CAM system. It is useful in the representation of the design of complex ob- jects and animations. The two types of surfaces most used in geometric designing are para- metric and implicit surfaces. For that reason different methods have been given for either parametric-parametric or implicit-implicit surface intersection curves in R3. The numerical marching method is the most widely used method for computing the intersection curves in R3 and R4. The marching method involves generation of sequences of points of an intersection curve in the direction prescribed by the local geometry(Bajaj et al., 1988; Patrikalakis, 1993). arXiv:1601.04252v1 [math.DG] 17 Jan 2016 To compute the intersection curve with precision and efficiency, approaches of superior order are necessary, that is, they are needed to obtain the geometric properties of the intersection curves. -

An Implicit Surface Polygonizer
An Implicit Surface Polygonizer Jules Bloomenthal The University of Calgary Calgary, Alberta T2N 1N4 Canada An algorithm for the polygonization of implicit surfaces is described and an implementation in C is provided. The discussion reviews implicit surface polygonization, and compares various methods. Introduction Some shapes are more readily defined by implicit, rather than parametric, techniques. For example, consider a sphere centered at C with radius r. It can be described parametrically as {P}, where: β α β α β α ∈ π β ∈ π π (Px, Py, Pz) = (Cx, Cy, Cz)+(r cos cos , r cos sin , r sin ), (0, 2 ), (- /2, /2). The implicit definition for the same sphere is more compact: 2 2 2 2 (Px-Cx) +(Py-Cy) +(Pz-Cz) -r = 0. Because an implicit representation does not produce points by substitution, root-finding must be employed to render its surface. One such method is ray tracing, which can generate excellent images of implicit surfaces. Alternatively, an image of the function (not surface) can be created with volume rendering. Polygonization is a method whereby a polygonal (i.e., parametric) approximation to the implicit surface is created from the implicit surface function. This allows the surface to be rendered with conventional polygon renderers; it also permits non-imaging operations, such as positioning an object on the surface. Polygonization consists of two principal steps. First, space is partitioned into adjacent cells at whose corners the implicit surface function is evaluated; negative values are considered inside the surface, positive values outside. Second, within each cell, the intersections of cell edges with the implicit surface are connected to form one or more polygons. -

NUMERICAL METHODS for RAY TRACING IMPLICITLY DEFINED SURFACES | Numerical Methods for Ray Tracing Implicitly Defined Surfaces⇤
CS371 2014 NUMERICAL METHODS FOR RAY TRACING IMPLICITLY DEFINED SURFACES | Numerical Methods for Ray Tracing Implicitly Defined Surfaces⇤ Morgan McGuire Williams College September 25, 2014 (Updated October 6, 2014) Figure 1: A 60 fps interactive reference scene defined by implicit surfaces ray traced on GeForce 650M using the techniques described in this document. Figure 2: An impressive demo of real-time ray-traced implicit surface fractals by Kali (Pablo Roman Andrioli), implemented in about 300 lines of GLSL https://www.shadertoy.com/ view/ldjXzW. ⇤This document is an early draft of an upcoming Graphics Codex chapter. http://graphics.cs.williams.edu/courses/cs371 1 Contents 1 Primary Surfaces 3 2 Analytic Ray Intersection 3 3 Numerical Ray Intersection 3 4 Ray Marching 4 5 Distance Estimators 5 6 Sphere Tracing 5 7 Some Distance Estimators 6 7.1 Sphere ......................................... 6 7.2 Plane ......................................... 6 7.3 Box .......................................... 6 7.4 Rounded Box ..................................... 7 7.5 Torus ......................................... 7 7.6 Wheel ......................................... 7 7.7 Cylinder ........................................ 8 8 Computing Normals 8 9 A Simple GLSL Ray Caster 9 10 Operations on Distance Estimators 11 11 Some Useful Operators 12 11.1 Union ......................................... 12 11.2 Intersection ...................................... 12 11.3 Subtraction ...................................... 12 11.4 Repetition ...................................... -

Analytic and Differential Geometry Mikhail G. Katz∗
Analytic and Differential geometry Mikhail G. Katz∗ Department of Mathematics, Bar Ilan University, Ra- mat Gan 52900 Israel Email address: [email protected] ∗Supported by the Israel Science Foundation (grants no. 620/00-10.0 and 84/03). Abstract. We start with analytic geometry and the theory of conic sections. Then we treat the classical topics in differential geometry such as the geodesic equation and Gaussian curvature. Then we prove Gauss’s theorema egregium and introduce the ab- stract viewpoint of modern differential geometry. Contents Chapter1. Analyticgeometry 9 1.1. Circle,sphere,greatcircledistance 9 1.2. Linearalgebra,indexnotation 11 1.3. Einsteinsummationconvention 12 1.4. Symmetric matrices, quadratic forms, polarisation 13 1.5.Matrixasalinearmap 13 1.6. Symmetrisationandantisymmetrisation 14 1.7. Matrixmultiplicationinindexnotation 15 1.8. Two types of indices: summation index and free index 16 1.9. Kroneckerdeltaandtheinversematrix 16 1.10. Vector product 17 1.11. Eigenvalues,symmetry 18 1.12. Euclideaninnerproduct 19 Chapter 2. Eigenvalues of symmetric matrices, conic sections 21 2.1. Findinganeigenvectorofasymmetricmatrix 21 2.2. Traceofproductofmatricesinindexnotation 23 2.3. Inner product spaces and self-adjoint endomorphisms 24 2.4. Orthogonal diagonalisation of symmetric matrices 24 2.5. Classification of conic sections: diagonalisation 26 2.6. Classification of conics: trichotomy, nondegeneracy 28 2.7. Characterisationofparabolas 30 Chapter 3. Quadric surfaces, Hessian, representation of curves 33 3.1. Summary: classificationofquadraticcurves 33 3.2. Quadric surfaces 33 3.3. Case of eigenvalues (+++) or ( ),ellipsoid 34 3.4. Determination of type of quadric−−− surface: explicit example 35 3.5. Case of eigenvalues (++ ) or (+ ),hyperboloid 36 3.6. Case rank(S) = 2; paraboloid,− hyperbolic−− paraboloid 37 3.7. -

On the Velocity of an Implicit Surface
On the Velocity of an Implicit Surface JOS STAM and RYAN SCHMIDT Autodesk Research In this paper we derive an equation for the velocity of an arbitrary time- ample, if we translate a sphere by a constant velocity, then each evolving implicit surface. Strictly speaking only the normal component of point of the surface will also move at this velocity. To fix the tan- the velocity is unambiguously defined. This is because an implicit surface gential velocity we need to impose another condition on the motion does not have a unique parametrization. However, by enforcing a constraint of these particles. In this paper we propose that the normalized gra- on the evolution of the normal field we obtain a unique tangential compo- dient field should not change over time. This is indeed the case nent. We apply our formulas to surface tracking and to the problem of com- when the implicit surface undergoes a translational motion. puting velocity vectors of a motion blurred blobby surface. Other possible This work was initially motivated by the problem of motion blur- applications are mentioned at the end of the paper. ring iso-surface meshes of a particle simulation. However, in es- timating the tangential velocity we have also addressed the more Categories and Subject Descriptors: I.3.5 [Computer Graphics]: Com- general problem of predicting where a point on a time-varying im- putational Geometry and Object Modeling; I.3.6 [Computer Graphics]: plicit surface will move to in the next frame. With this building Methodology and Techniques block we can more accurately track an animated implicit surface General Terms: Implicit surfaces, Blobbies, motion blur with a mesh or set of particles, rather than generating a new mesh at every frame. -

Guaranteeing the Topology of an Implicit Surface Polygonization For
Guaranteeing the Topology of an Implicit Surface Polygonization for Interactive Modeling 2 Barton T. Stander1 John C. Hart School of EECS Washington State University Abstract of topology in computer graphics, such as the connection patterns Morse theory shows how the topology of an implicit surface is af- of a mesh of polygons or parametric patches. Thus, for a polygo- fected by its function’s critical points, whereas catastrophe theory nization to accurately represent the topology of an implicit surface shows how these critical points behave as the function’s parameters the number of components and the genus of each component of the change. Interval analysis finds the critical points, and they can also polygonization need to agree with that of the implicit surface. be tracked efficiently during parameter changes. Changes in the Implicit surfaces are commonly polygonized to a given degree function value at these critical points cause changes in the topology. of geometric accuracy. This accuracy is in some cases adaptively Techniques for modifying the polygonization to accommodate such related to the local curvature of the implicit surface, reducing the changes in topology are given. These techniques are robust enough number of polygons without affecting the appearance of the sur- to guarantee the topology of an implicit surface polygonization, and face. This work instead focuses on a polygonization that accu- are efficient enough to maintain this guarantee during interactive rately discerns the topology of an implicit surface. Topologically- modeling. The impact of this work is a topologically-guaranteed accurate polygonization can reduce the number of polygons with- polygonization technique, and the ability to directly and accurately out affecting the structure of the surface. -

1 a Survey on Implicit Surface Polygonization
1 A Survey on Implicit Surface Polygonization B. R. de ARAUJO´ , University of Toronto / INESC-ID Lisboa DANIEL S. LOPES, INESC-ID Lisboa PAULINE JEPP, INESC-ID Lisboa JOAQUIM A. JORGE, INESC-ID Lisboa BRIAN WYVILL, University of Victoria Implicit surfaces are commonly used in image creation, modeling environments, modeling objects and scientific data visualization. In this paper, we present a survey of different techniques for fast visualization of implicit surfaces. The main classes of visualization algorithms are identified along with the advantages of each in the context of the different types of implicit surfaces commonly used in Computer Graphics. We focus closely on polygonization methods as they are the most suited to fast visualization. Classification and comparison of existing approaches are presented using criteria extracted from current research. This enables the identification of the best strategies according to the number of specific requirements such as speed, accuracy, quality or stylization. Categories and Subject Descriptors: I.3.5 [COMPUTER GRAPHICS]: Computational Geometry and Object Mod- eling General Terms: Design, Algorithms, Performance Additional Key Words and Phrases: Implicit surface, shape modeling, polygonization, surface meshing, surface rendering ACM Reference Format: Bruno R. de Araujo,´ Daniel S. Lopes, Pauline Jepp, Joaquim A. Jorge, and Brian Wyvill, 2014. A survey on implicit surface polygonization. ACM Comput. Surv. 1, 1, Article 1 (January 1), 36 pages. DOI:http://dx.doi.org/10.1145/0000000.0000000 1. INTRODUCTION Implicit Surfaces are a popular 3D mathematical model used in Computer Graphics. They are used to represent shapes in Modeling, Animation, Scientific Simulation and Visualiza- tion [Gomes et al.