Implicit Functions 11.1 Partial Derivatives to Express the Fact That Z Is a Function of the Two Independent Variables X and Y We Write Z = Z(X, Y)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

33 .1 Implicit Differentiation 33.1.1Implicit Function
Module 11 : Partial derivatives, Chain rules, Implicit differentiation, Gradient, Directional derivatives Lecture 33 : Implicit differentiation [Section 33.1] Objectives In this section you will learn the following : The concept of implicit differentiation of functions. 33 .1 Implicit differentiation \ As we had observed in section , many a times a function of an independent variable is not given explicitly, but implicitly by a relation. In section we had also mentioned about the implicit function theorem. We state it precisely now, without proof. 33.1.1Implicit Function Theorem (IFT): Let and be such that the following holds: (i) Both the partial derivatives and exist and are continuous in . (ii) and . Then there exists some and a function such that is differentiable, its derivative is continuous with and 33.1.2Remark: We have a corresponding version of the IFT for solving in terms of . Here, the hypothesis would be . 33.1.3Example: Let we want to know, when does the implicit expression defines explicitly as a function of . We note that and are both continuous. Since for the points and the implicit function theorem is not applicable. For , and , the equation defines the explicit function and for , the equation defines the explicit function Figure 1. y is a function of x. A result similar to that of theorem holds for function of three variables, as stated next. Theorem : 33.1.4 Let and be such that (i) exist and are continuous at . (ii) and . Then the equation determines a unique function in the neighborhood of such that for , and , Practice Exercises : Show that the following functions satisfy conditions of the implicit function theorem in the neighborhood of (1) the indicated point. -

Efficient Rasterization of Implicit Functions
Efficient Rasterization of Implicit Functions Torsten Möller and Roni Yagel Department of Computer and Information Science The Ohio State University Columbus, Ohio {moeller, yagel}@cis.ohio-state.edu Abstract Implicit curves are widely used in computer graphics because of their powerful fea- tures for modeling and their ability for general function description. The most pop- ular rasterization techniques for implicit curves are space subdivision and curve tracking. In this paper we are introducing an efficient curve tracking algorithm that is also more robust then existing methods. We employ the Predictor-Corrector Method on the implicit function to get a very accurate curve approximation in a short time. Speedup is achieved by adapting the step size to the curvature. In addi- tion, we provide mechanisms to detect and properly handle bifurcation points, where the curve intersects itself. Finally, the algorithm allows the user to trade-off accuracy for speed and vice a versa. We conclude by providing examples that dem- onstrate the capabilities of our algorithm. 1. Introduction Implicit surfaces are surfaces that are defined by implicit functions. An implicit functionf is a map- ping from an n dimensional spaceRn to the spaceR , described by an expression in which all vari- ables appear on one side of the equation. This is a very general way of describing a mapping. An n dimensional implicit surfaceSpR is defined by all the points inn such that the implicit mapping f projectspS to 0. More formally, one can describe by n Sf = {}pp R, fp()= 0 . (1) 2 Often times, one is interested in visualizing isosurfaces (or isocontours for 2D functions) which are functions of the formf ()p = c for some constant c. -

Integrated Calculus/Pre-Calculus
Furman University Department of Mathematics Greenville, SC, 29613 Integrated Calculus/Pre-Calculus Abstract Mark R. Woodard Contents JJ II J I Home Page Go Back Close Quit Abstract This work presents the traditional material of calculus I with some of the material from a traditional precalculus course interwoven throughout the discussion. Pre- calculus topics are discussed at or soon before the time they are needed, in order to facilitate the learning of the calculus material. Miniature animated demonstra- tions and interactive quizzes will be available to help the reader deepen his or her understanding of the material under discussion. Integrated This project is funded in part by the Mellon Foundation through the Mellon Furman- Calculus/Pre-Calculus Wofford Program. Many of the illustrations were designed by Furman undergraduate Mark R. Woodard student Brian Wagner using the PSTricks package. Thanks go to my wife Suzan, and my two daughters, Hannah and Darby for patience while this project was being produced. Title Page Contents JJ II J I Go Back Close Quit Page 2 of 191 Contents 1 Functions and their Properties 11 1.1 Functions & Cartesian Coordinates .................. 13 1.1.1 Functions and Functional Notation ............ 13 1.2 Cartesian Coordinates and the Graphical Representa- tion of Functions .................................. 20 1.3 Circles, Distances, Completing the Square ............ 22 1.3.1 Distance Formula and Circles ................. 22 Integrated 1.3.2 Completing the Square ...................... 23 Calculus/Pre-Calculus 1.4 Lines ............................................ 24 Mark R. Woodard 1.4.1 General Equation and Slope-Intercept Form .... 24 1.4.2 More On Slope ............................. 24 1.4.3 Parallel and Perpendicular Lines ............. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -
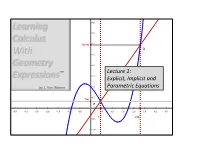
Lecture 1: Explicit, Implicit and Parametric Equations
4.0 3.5 f(x+h) 3.0 Q 2.5 2.0 Lecture 1: 1.5 Explicit, Implicit and 1.0 Parametric Equations 0.5 f(x) P -3.5 -3.0 -2.5 -2.0 -1.5 -1.0 -0.5 0.5 1.0 1.5 2.0 2.5 3.0 3.5 x x+h -0.5 -1.0 Chapter 1 – Functions and Equations Chapter 1: Functions and Equations LECTURE TOPIC 0 GEOMETRY EXPRESSIONS™ WARM-UP 1 EXPLICIT, IMPLICIT AND PARAMETRIC EQUATIONS 2 A SHORT ATLAS OF CURVES 3 SYSTEMS OF EQUATIONS 4 INVERTIBILITY, UNIQUENESS AND CLOSURE Lecture 1 – Explicit, Implicit and Parametric Equations 2 Learning Calculus with Geometry Expressions™ Calculus Inspiration Louis Eric Wasserman used a novel approach for attacking the Clay Math Prize of P vs. NP. He examined problem complexity. Louis calculated the least number of gates needed to compute explicit functions using only AND and OR, the basic atoms of computation. He produced a characterization of P, a class of problems that can be solved in by computer in polynomial time. He also likes ultimate Frisbee™. 3 Chapter 1 – Functions and Equations EXPLICIT FUNCTIONS Mathematicians like Louis use the term “explicit function” to express the idea that we have one dependent variable on the left-hand side of an equation, and all the independent variables and constants on the right-hand side of the equation. For example, the equation of a line is: Where m is the slope and b is the y-intercept. Explicit functions GENERATE y values from x values. -

Implicit Differentiation
opes. A Neurips 2020 Tut orial by Marc Deisenro A Swamps of integrationnumerical b Monte Carlo Heights C Fo r w w m a r o al r N izi ng Flo d -ba h ckw ime ar Of T d D B ea c h Hills There E Unrolling Backprop Bay f Expectations and Sl and fExpectations B ack Again: A Tale o Tale A Again: ack and th and opes. A Neurips 2020 Tut orial by Marc Deisenro A Swamps of integrationnumerical b Monte Carlo Heights C Fo r w Implicit of Vale w m a r o al r N izi ng Flo d -ba h G ckw ime ar Of T d D B Differentiation ea c h Hills There E Unrolling Backprop Bay f Expectations and Sl and fExpectations B ack Again: A Tale o Tale A Again: ack and th and Implicit differentiation Cheng Soon Ong Marc Peter Deisenroth December 2020 oon n S O g g ’s n Tu e t hC o d r n C i a a h l t M a o t a M r r n c e D e s i Motivation I In machine learning, we use gradients to train predictors I For functions f(x) we can directly obtain its gradient rf(x) I How to represent a constraint? G(x; y) = 0 E.g. conservation of mass 1 dy = 3x2 + 4x + 1 dx Observe that we can write the equation as x3 + 2x2 + x + 4 − y = 0 which is of the form G(x; y) = 0. -

Transversal Intersection of Hypersurfaces in R^ 5
TRANSVERSAL INTERSECTION CURVES OF HYPERSURFACES IN R5 a b c d, Mohamd Saleem Lone , O. Al´essio , Mohammad Jamali , Mohammad Hasan Shahid ∗ aCentral University of Jammu, Jammu, 180011, India. bUniversidade Federal do Triangulo˙ Mineiro-UFTM, Uberaba, MG, Brasil cDepartment of Mathematics, Al-Falah University, Haryana, 121004, India dDepartment of Mathematics, Jamia Millia Islamia, New Delhi-110 025, India Abstract In this paper we present the algorithms for calculating the differential geometric properties t,n,b1,b2,b3,κ1,κ2,κ3,κ4 , geodesic curvature and geodesic torsion of the transversal inter- { } section curve of four hypersurfaces (given by parametric representation) in Euclidean space R5. In transversal intersection the normals of the surfaces at the intersection point are linearly inde- pendent, while as in nontransversal intersection the normals of the surfaces at the intersection point are linearly dependent. Keywords: Hypersurfaces, transversal intersection, non-transversal intersection. 1. Introduction The surface-surface intersection problem is a fundamental process needed in modeling shapes in CAD/CAM system. It is useful in the representation of the design of complex ob- jects and animations. The two types of surfaces most used in geometric designing are para- metric and implicit surfaces. For that reason different methods have been given for either parametric-parametric or implicit-implicit surface intersection curves in R3. The numerical marching method is the most widely used method for computing the intersection curves in R3 and R4. The marching method involves generation of sequences of points of an intersection curve in the direction prescribed by the local geometry(Bajaj et al., 1988; Patrikalakis, 1993). arXiv:1601.04252v1 [math.DG] 17 Jan 2016 To compute the intersection curve with precision and efficiency, approaches of superior order are necessary, that is, they are needed to obtain the geometric properties of the intersection curves. -

Notes on Calculus and Optimization
Economics 101A Section Notes GSI: David Albouy Notes on Calculus and Optimization 1 Basic Calculus 1.1 Definition of a Derivative Let f (x) be some function of x, then the derivative of f, if it exists, is given by the following limit df (x) f (x + h) f (x) = lim − (Definition of Derivative) dx h 0 h → df although often this definition is hard to apply directly. It is common to write f 0 (x),or dx to be shorter, or dy if y = f (x) then dx for the derivative of y with respect to x. 1.2 Calculus Rules Here are some handy formulas which can be derived using the definitions, where f (x) and g (x) are functions of x and k is a constant which does not depend on x. d df (x) [kf (x)] = k (Constant Rule) dx dx d df (x) df (x) [f (x)+g (x)] = + (Sum Rule) dx dx dy d df (x) dg (x) [f (x) g (x)] = g (x)+f (x) (Product Rule) dx dx dx d f (x) df (x) g (x) dg(x) f (x) = dx − dx (Quotient Rule) dx g (x) [g (x)]2 · ¸ d f [g (x)] dg (x) f [g (x)] = (Chain Rule) dx dg dx For specific forms of f the following rules are useful in economics d xk = kxk 1 (Power Rule) dx − d ex = ex (Exponent Rule) dx d 1 ln x = (Logarithm Rule) dx x 1 Finally assuming that we can invert y = f (x) by solving for x in terms of y so that x = f − (y) then the following rule applies 1 df − (y) 1 = 1 (Inverse Rule) dy df (f − (y)) dx Example 1 Let y = f (x)=ex/2, then using the exponent rule and the chain rule, where g (x)=x/2,we df (x) d x/2 d x/2 d x x/2 1 1 x/2 get dx = dx e = d(x/2) e dx 2 = e 2 = 2 e . -

Analytic and Differential Geometry Mikhail G. Katz∗
Analytic and Differential geometry Mikhail G. Katz∗ Department of Mathematics, Bar Ilan University, Ra- mat Gan 52900 Israel Email address: [email protected] ∗Supported by the Israel Science Foundation (grants no. 620/00-10.0 and 84/03). Abstract. We start with analytic geometry and the theory of conic sections. Then we treat the classical topics in differential geometry such as the geodesic equation and Gaussian curvature. Then we prove Gauss’s theorema egregium and introduce the ab- stract viewpoint of modern differential geometry. Contents Chapter1. Analyticgeometry 9 1.1. Circle,sphere,greatcircledistance 9 1.2. Linearalgebra,indexnotation 11 1.3. Einsteinsummationconvention 12 1.4. Symmetric matrices, quadratic forms, polarisation 13 1.5.Matrixasalinearmap 13 1.6. Symmetrisationandantisymmetrisation 14 1.7. Matrixmultiplicationinindexnotation 15 1.8. Two types of indices: summation index and free index 16 1.9. Kroneckerdeltaandtheinversematrix 16 1.10. Vector product 17 1.11. Eigenvalues,symmetry 18 1.12. Euclideaninnerproduct 19 Chapter 2. Eigenvalues of symmetric matrices, conic sections 21 2.1. Findinganeigenvectorofasymmetricmatrix 21 2.2. Traceofproductofmatricesinindexnotation 23 2.3. Inner product spaces and self-adjoint endomorphisms 24 2.4. Orthogonal diagonalisation of symmetric matrices 24 2.5. Classification of conic sections: diagonalisation 26 2.6. Classification of conics: trichotomy, nondegeneracy 28 2.7. Characterisationofparabolas 30 Chapter 3. Quadric surfaces, Hessian, representation of curves 33 3.1. Summary: classificationofquadraticcurves 33 3.2. Quadric surfaces 33 3.3. Case of eigenvalues (+++) or ( ),ellipsoid 34 3.4. Determination of type of quadric−−− surface: explicit example 35 3.5. Case of eigenvalues (++ ) or (+ ),hyperboloid 36 3.6. Case rank(S) = 2; paraboloid,− hyperbolic−− paraboloid 37 3.7. -

Introduction to Manifolds
Introduction to Manifolds Roland van der Veen 2018 2 Contents 1 Introduction 5 1.1 Overview . 5 2 How to solve equations? 7 2.1 Linear algebra . 9 2.2 Derivative . 10 2.3 Intermediate and mean value theorems . 13 2.4 Implicit function theorem . 15 3 Is there a fundamental theorem of calculus in higher dimensions? 23 3.1 Elementary Riemann integration . 24 3.2 k-vectors and k-covectors . 26 3.3 (co)-vector fields and integration . 33 3.3.1 Integration . 34 3.4 More on cubes and their boundary . 37 3.5 Exterior derivative . 38 3.6 The fundamental theorem of calculus (Stokes Theorem) . 40 3.7 Fundamental theorem of calculus: Poincar´elemma . 42 4 Geometry through the dot product 45 4.1 Vector spaces with a scalar product . 45 4.2 Riemannian geometry . 47 5 What if there is no good choice of coordinates? 51 5.1 Atlasses and manifolds . 51 5.2 Examples of manifolds . 55 5.3 Analytic continuation . 56 5.4 Bump functions and partitions of unity . 58 5.5 Vector bundles . 59 5.6 The fundamental theorem of calculus on manifolds . 62 5.7 Geometry on manifolds . 63 3 4 CONTENTS Chapter 1 Introduction 1.1 Overview The goal of these notes is to explore the notions of differentiation and integration in a setting where there are no preferred coordinates. Manifolds provide such a setting. This is not calculus. We made an attempt to prove everything we say so that no black boxes have to be accepted on faith. This self-sufficiency is one of the great strengths of mathematics. -

Implicit Functions and Their Differentials in General Analysis*
IMPLICIT FUNCTIONS AND THEIR DIFFERENTIALS IN GENERAL ANALYSIS* BY T. H. HILDEBRANDT AND LAWRENCEM. GRAVESf Introduction. Implicit function theorems occur in analysis in many different forms, and have a fundamental importance. Besides the classical theorems as given for example in Goursat's Cours d'Analyse and Bliss's Princeton Colloquium Lectures, and the classical theorems on linear integral equations, implicit function theorems in the domain of infinitely many variables have been developed by Volterra, Evans, Levy, W. L. Hart and others. Î The existence and imbedding theorems for solutions of differential equa- tions, as treated for example by Bliss, § have also received extensions to domains of infinitely many variables by Moulton, Hart, Barnett, Bliss and others. If Special properties in the case of linear differential equations in an infinitude of variables have been treated by Hart and Hildebrandt. || On the other hand, Hahn and Carathéodory** have made important generalizations of the notion of differential equation by removing conti- nuity restrictions on the derivatives and by writing the equations in the form of integral equations. *Presented to the Society March 25, 1921, and December 29, 1924; received by the editors January 28,1926. jNational Research Fellow in Mathematics. ÎSee Volterra, Fonctions de Lignes, Chapter 4; Evans, Cambridge Colloquium Lectures, pp. 52-72; Levy, Bulletin de la Société Mathématique de France, vol. 48 (1920), p. 13, Hart, these Transactions, vol. 18 (1917), pp. 125-150, where additional references may be found; also vol. 23 (1922), pp. 45-50, and Annals of Mathematics, (2), vol. 24 (1922)pp. 29 and 35. § Princeton Colloquium, and Bulletin of the American Mathematical Society, vol. -

February 18, 2019 LECTURE 7: DIRECTIONAL DERIVATIVES
February 18, 2019 LECTURE 7: DIRECTIONAL DERIVATIVES. 110.211 HONORS MULTIVARIABLE CALCULUS PROFESSOR RICHARD BROWN Synopsis. Today, we move into directional derivatives, a generalization of a partial deriva- tive where we look for how a function is changing at a point in any single direction in the domain. This gives a powerful tool, both conceptually as well as technically, to discuss the role the derivative of a function plays in exposing the properties of both functions on and sets within Euclidean space. We define the gradient of a real-valued function (finally) and its interpretations and usefulness, and move toward one of the most powerful theorems of multivariable calculus, the Implicit Function Theorem. The Directional Derivative. 7.0.1. Vector form of a partial derivative. Recall the definition of a partial derivative evalu- ated at a point: Let f : X ⊂ R2 ! R, x open, and (a; b) 2 X. Then the partial derivative of f with respect to the first coordinate x, evaluated at (a; b) is @f f(a + h; b) − f(a; b) (a; b) = lim : @x h!0 h Here, we vary only the first coordinate, leaving the y coordinate value b fixed, and write a (a + h; b) = (a; b) + (h; 0). In vector notation, this is like taking the vector a = , and b adding to it a small amount h, but only in the x-direction. Indeed, this means adding to a 1 the vector h = hi, where here we use the standard convention for unit vectors in 2 0 R 3 and R , namely i = e1, j = e2, etc.