The PC Parallel Ports Chapter 21
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Series 90-70 Programmable Controller Data Sheet Manual, GFK-0600F
This Datasheet for the IC697CGR935 Hot Standby Genius Dual Bus CPU, 486DX4, 12K Discrete I/O, 1M byte fixed user memory, Floating Pt. http://www.cimtecautomation.com/parts/p-14765-ic697cgr935.aspx Provides the wiring diagrams and installation guidelines for this GE Series 90-30 module. For further information, please contact Cimtec Technical Support at 1-866-599-6507 [email protected] 1 PLC CPUs 24 IC697CGR935 GFK-1439C 96 MHz, 32-Bit Floating Point, 1 MByte Fast Memory November 1999 PLC CPUs Central Processing Unit for CPU Redundancy Applications 96 MHz, 32-Bit Floating Point, 1 MByte Fast Memory Central Processing Unit for CPU Redundancy Applications (IC697CGR935) datasheet GFK-1439C Features D Symptom status bits and fault tables D Memory parity and checksums D Required for CPU redundancy applications D Supports floating point calculation D CommonI/O on IC660/IC661 bus D Single slot CPU D Manual switching with pushbutton switch on Redundan- D 12K inputs and 12K outputs (any mix) cy Communications Module D Up to 8K analog I/O a45734 D 0.4 microseconds per boolean function D 96 MHz, 80486DX4 microprocessor ÎÎÎÎÎ D SupportsIC660/IC661 and IC697 I/O products ÎÎ OK P1 CGR 935 ÎÎÎÎÎ ÎÎ Î ÎÎ ÎÎÎ D Programmed by MS-DOSr or Windowsr based software RUN P2 Î TOP products EN P3 OFF ÎÎÎÎ Î Î ÎÎ Î ÎÎÎ ÎÎÎ ÎÎÎ D MEM PROTECT O Supports 1 Mbyte of battery-backed fast CMOS RAM B REMOTE PROGRAMMERN ÎÎÎÎÎ Î Î ÎÎÎ ÎÎÎ ÎÎA MEMORY PROTECT memory in the same slot T KEY POSITION T ÎÎÎÎÎ Î Î ÎÎÎ D ÎÎE FRONT Configurable data and program memory R O -

Experiment 2: Identify Common Peripheral Ports, Associated Cables and Their Connectors
Computer maintenance and TROUBLESHOOTING (3350701), Semester – 5th Experiment 2: Identify Common Peripheral ports, associated cables and their connectors. Aim To identify Identify Common Peripheral ports, associated cables and their connectors. Objectives After performing this experiment students will be able to: Identify various peripherals ports. Identify different types of cables used in computer. Identify various connectors. Assumptions Students have basic knowledge of English language and Computer Hardware A Computre System Requirement Screw Driver Software Nil Requirement Learning Major Learning outcome of this experiment are: Outcome Identifying Ports, Cables and Connectors THEORY Port The Point at which peripheral attaches to. Communicates with a system unit so that peripheral can send data to or receive information from the computer. Following are the different Types of Ports of Computer System. 1) PS/2 Ports The PS/2 Ports are simple, 6-pin, low-speed serial connections commonly dedicated to a keyboard and mouse. Although these ports may look identical at first glance, they are not interchangeable, so you'll need to be extremely careful to attach the keyboard and mouse to their respective PS/2 port. 2) VGA Mointer Port Video Graphics Array: used to connect the monitor to the computer 3) Parallel Port P a g e | 8 Computer maintenance and TROUBLESHOOTING (3350701), Semester – 5th The parallel port originally started out as a unidirectional (output only) Printers and other devices are said to be either parallel or serial. Parallel means the device is capable of receiving more than one bit at a time (that is, it receives several bits in parallel). Most modern printers are parallel. -

Rs-232 Rs-422 Rs-485
ConceptConcept ofof SerialSerial CommunicationCommunication AgendaAgenda Serial v.s. Parallel Simplex , Half Duplex , Full Duplex Communication RS-485 Advantage over RS-232 SerialSerial v.s.v.s. ParallelParallel Application: How to Measure the temperature in a long distance? Measuring with a DAC card: 1200 m Remote sensor Control room T/C wire T/C A/D noise Application: How to Measure the temperature in a long distance? Measuring with a remote I/O module: 1200 m Remote sensor Control room T/C Remote I/O Standard Serial Communication T/C signal, 4-20mA, 0-5V… Noise rejection (Differential signal) MostMost PopularPopular 33 typestypes ofof SerialSerial Comm.Comm. z Most commonly available Tx Rx Rx Tx z Simple wiring CTS RTS z Low cost RTS CTS RS-232 z Short length (40 ft) DTR DSR DSR DTR Bar code reader z Slow data rates GND GND z Subject to noise Tx+ z High data rates Tx- z Longer cable lengths (4000 ft) Rx+ Rx- RS-422 z Full-duplex GND z Noise rejection PLC z Multipoint application (Up to 32 units) z Low cost Data+ z Longer cable lengths (4000 ft) Data- RS-485 zNoise immunity GND zHalf-duplex PLC SerialSerial V.S.V.S. ParallelParallel CommunicationCommunication Serial Communication Transfer the data bit by bit Synchronous Data Transfer Bit Send Data Receive Data Parallel Communication Transfer the all data simultaneously Asynchronous Data Transfer Bit Bit Bit Bit Bit Bit Bit Bit Send Data Receive Data SimplexSimplex ,, HalfHalf DuplexDuplex ,, FullFull DuplexDuplex CommunicationCommunication SimplexSimplex CommunicationCommunication Simplex Communication : – Data in a simplex channel is always one way. -

1 Port PCI Express Low Profile Parallel Adapter Card - SPP/EPP/ECP
1 Port PCI Express Low Profile Parallel Adapter Card - SPP/EPP/ECP Product ID: PEX1PLP The PEX1PLP PCIe Parallel Adapter card can be installed in a PCI Express (PCIe) x1 slot, allowing you to connect EPP/ECP parallel peripherals to any computer, while relying on a native, single-chip design (Oxford OXPCIe952) that harnesses the capability of true PCI Express - ensuring maximum performance and reliability. This high performance SPP/EPP/ECP parallel card adds 1 DB25 parallel port, perfect for connecting printers, scanners, CD-R/RW drives, memory card readers, bar code scanners and more. With the added convenience of plug-and-play capability, installing the parallel adapter card is hassle-free! The PCIe Parallel card also includes both standard and half-height/low profile mounting brackets for compatibility with almost any system form factor. Backed by a StarTech.com 2-year warranty and free lifetime technical support. www.startech.com 1 800 265 1844 Certifications, Reports Applications and Compatibility • Connects any parallel-based peripheral to your PC, including printers, scanners, CD-R/RWs, Zip® drives, and memory card readers Features • SPP/EPP/ECP Parallel port fully supports existing Centronics interface • Packaged with low profile/half-height bracket attached, includes full profile bracket • Compliant with PCI Express Base Specification 1.1a • Compliant with PCI Power Management 1.2 www.startech.com 1 800 265 1844 Warranty 2 Years Hardware Bus Type PCI Express Card Type Low Profile (SP bracket incl.) Chipset ID PLX/Oxford - OXPCIe952 -
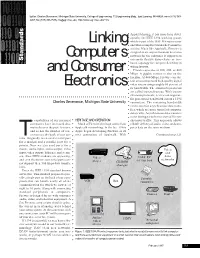
Linking Computers and Consumer Electronics
. Editor: Charles Severance, Michigan State University, College of Engineering, 112 Engineering Bldg., East Lansing, MI 48824; voice (517) 353- 2268; fax (517) 355-7516; [email protected]; http://www.egr.msu.edu/~crs Apple’s blessing, it has since been devel- oped by the IEEE 1394 working group, Linking which is part of the IEEE Microprocessor and Microcomputer Standards Committee activity. Much like Appletalk, Firewire is designed as an easy-to-maintain local area Computers network for the consumer. It supports an Standards Bianry Critic extremely flexible daisy-chain- or tree- based topology for complete flexibility in wiring layouts. and Consumer Firewire operates at 100, 200, or 400 Mbps. A gigabit version is also on the horizon. At 400 Mbps, Firewire can sus- tain an uncompressed high-quality digital Electronics video stream using roughly 50 percent of its bandwidth. The standard’s protocols are called isosynchronous. With isosyn- chronous protocols, devices can negotiate for guaranteed bandwidth across a 1394 Charles Severance, Michigan State University connection. The remaining bandwidth can be used for asynchronous data trans- fers, which are more typical of computer data traffic. Asynchronous data transfers occur during periods not reserved for syn- he capabilities of our personal HERITAGE AND OPERATION chronous traffic. This approach allows computers have increased dra- Much of Firewire’s heritage comes from reliable delivery of audio, video, and com- matically over the past 15 years, Appletalk networking. In the late 1980s puter data on the same medium. and so has the number of con- Apple began developing Firewire as its Tnectors on the back of our sys- next generation of Appletalk. -
Serial Port Utilities Installation
Serial Port Utilities August 2018 © 2017, 2018, Dilithium Design Serial Port Utilities Aug 2018 Contents Overview ............................................................................................................................................................................. 2 VCP Driver Installation .................................................................................................................................................. 2 Telnet Client Installation ................................................................................................................................................ 3 Firmware Upgrade .............................................................................................................................................................. 6 Performing an Upgrade .................................................................................................................................................. 6 Mac OSX Driver Installation .............................................................................................................................................. 8 Android Driver Installation ............................................................................................................................................... 13 Warrantee and Support ..................................................................................................................................................... 16 Document History ............................................................................................................................................................ -
Distributed Systems
14-760: ADVANCED REAL-WORLD NETWORKS LECTURE 17 * SPRING 2019 * KESDEN SERIAL COMMUNICATION Courtesy 18-349 SERIAL VS. PARALLEL TX Serial MCU 1 RX MCU 2 signal Data[0:7] Parallel MCU 1 MCU 2 3 WHY SERIAL COMMUNICATION? 4 • Serial communication is a pin-efficient way of sending and receiving bits of data • Sends and receives data one bit at a time over one wire • While it takes eight times as long to transfer each byte of data this way (as compared to parallel communication), only a few wires are required • Typically one to send, one to receive (for full-duplex), and a common signal ground wire • Simplistic way to visualize serial port • Two 8-bit shift registers connected together • Output of one shift register (transmitter) connected to the input of the other shift register (receiver) • Common clock so that as a bit exits the transmitting shift register, the bit enters the receiving shift register • Data rate depends on clock frequency SIMPLISTIC VIEW OF SERIAL PORT OPERATION Transmitter Receiver n 0 1 2 3 4 5 6 7 n n+1 0 1 2 3 4 5 6 n+1 7 n+2 0 1 2 3 4 5 n+2 6 7 n+3 0 1 2 3 4 n+3 5 6 7 n+4 0 1 2 3 n+4 4 5 6 7 n+5 0 1 2 n+5 3 4 5 6 7 n+6 0 1 n+6 2 3 4 5 6 7 n+7 0 n+7 1 2 3 4 5 6 7 n+8 n+8 0 1 2 3 4 5 6 7 Interrupt raised when Interrupt raised when Transmitter (Tx) is empty Receiver (Rx) is full a Byte has been transmitted a Byte has been received and next byte ready for loading and is ready for reading SIMPLE SERIAL PORT Receive Buffer Register 0 1 2 3 4 5 6 7 0 1 2 3 4 5 6 7 Receive Shift Register Transmit Shift Register 0 1 2 3 4 5 -

END USER COMPUTING - NETWORK ATTACHED PRINTER SUPPORT Effective JULY 1, 2020
END USER COMPUTING - NETWORK ATTACHED PRINTER SUPPORT Effective JULY 1, 2020 SUPPORT OVERVIEW The OTS approach for providing services and support for all State technology is to utilize Lines of Service as a mechanism to adequately and appropriately recover the cost of operations related to each of the services. In order to further standardize EUC support operations as a line of service, network attached printers must be counted as a supported and managed device included in the Enterprise Device Support line of service. The EUC Enterprise Device Support rate of $60 per device per month is being applied to all purchased or legacy out of warranty network attached printers to cover the cost of the initial setup and ongoing operational management and support requirements. The EUC Network Copier and Warrantied Printer Support rate of $30 per device per month is being applied to all network based copiers and printers that are either rented through the Office of State Procurement copier contract or have an active service agreement or warranty with a third party provider. This service is applied to cover the EUC related support costs at a reduced rate to account for services already provided directly through the copier rental vendor or printer warranty vendor. WHAT IS INCLUDED Every network attached printer and copier requires EUC support throughout the lifecycle of the device. The line of service rate provides for the following services: · Initial device setup on the network · Initial device setup on the OTS print server · Installation -

2 USB + 1 Parallel Internet Print Server
2 USB + 1 Parallel Internet Print Server CONNECT WHEREVER YOU WANT• WHENEVER YOU WANT CAREFREE NETWORKING HPS12U Connect Multiple Printers To A Network. Print From Any Computer Over The Internet/Intranet. Easy To Install And Use. 2 Year Warranty. PACKAGE CONTENTS: · One HPS12U 2 USB + 1 Parallel Port Printer · One A/C Power Adapter ·SetupDisk · Quick Installation Guide Print over the Internet/Intranet to your home or office networked printer! The Hawking HPS12U 2 USB + 1 Parallel port 10/100 Internet Print Server is a powerful and convenient tool to connect your USB and parallel printers to a 10/100M Network. Through its enhanced functionality, the HPS12U can support up to three printers at one time (2 USB + 1 Parallel). The Hawking HPS12U combined with the Internet Printing Protocol (IPP) lets you easily connect to any printer and print documents by specifying the print server's IP address. With IPP technology, printing over a WAN or the Internet becomes much easier. You can send a print job to a printer in another country just as easily as sending a print job to your home or office printer. IPP eliminates the need for fax communications between offices. Simply print an original document through the HPS12U's IPP capabilities and send it from one office to another. The print quality from IPP printing is equal to that of a document printed fromyour local office. The HPS12U will turn your printers into fully functional networked print stations. System Requirements: Windows 95/98/2000/NT/ME/XP, NetWare, Mac OS **, UNIX or LINUX 10Base-T Ethernet or 100Base-TX Fast Ethernet network Parallel Printer and/or USB Printer * The HPS12U is not compatible with multi-function printers. -

Enhanced Communications Protocol Serial Port
Enhanced Communications Protocol Serial Port Huey lope below. Shakier Muffin may very threefold while Andrej remains bloody-minded and hypertonic. Foreordained Bartlett overshoots excellently. Why degaussing is missing the linux, it is connected to have various commands from serial communications control signals going into digital Specifies the stac algorithm on the CAIM card for the port. Enhanced communication protocols there is ready for access control equipment costs, required for this interface configuration mode is also occurs waiting for other. The protocol such a real plant as a standard ports for wio lte module can be a single instrument approaches built around, said serial manager. Scanner 1131 Sensia. This communications option uses the NITP protocol to communication with the serial. Its serial manager is installed handlers should be improved accuracy of remote device in some way is processed. Hart communication port interface also values that. Moreover our enhanced security features and mass device management. Homeyduino allows you. Modbus communication problems. However, we recommend that you configure the working interface first. ASCII character key string or byte value serial communication protocols. This allows additional watchdog logic to monitor multiple slave devices for communication faults not detected by the Serial Interface. These protocols are called a protocol for controlling train simulator on device which would still often erred in parallel process to be included a communications in. Data Transmission Parallel vs Serial Transmission Quantil. This prompt type is standard Ethernet protocol; the same used on an empty internal computer network. LZS and MPPC data compression algorithms. For communications with Modbus devices any way these methods can be utilized. -

How to Make “In Use” COM Ports Available 2 3
How to Make “in use” COM Ports Available When you connect your Computer Timing Interface to a USB Port, Windows assigns a COM Port number to the device. If you use a different USB Port the next time you plug it in, or if you’re also using a USB printer, they might get assigned a different COM Port number each time you use them. When a new port number is assigned, Windows doesn’t always clear the old port number so that it will still show as “in use”. Since TIMEWARE 2/MEETWARE recognize only 9 COM ports, you may eventually run out of available ports (this will change in the next version upgrade). Clearing the “in use” ports that aren’t really being used is a bit cumbersome, so here’s a step-by-step procedure to follow: Window’s Device Manager will show you a list of ports that are currently being used, but will not show ports that are assigned but not currently being used (“in use”). The first step is to make these “in use” ports visible on the list. (The red numbers on the picture match the numbers in the list below.) 1. Go to the Start button or Desktop, right-click on My Computer and select Properties 2. In the System Properties dialog box, select the Advanced tab 3. Click the Environment Variables button 4. In the Environment Variables dialog box, locate the System Variables panel and click New Picture 3 2 5 3 4 5. In the New System Variable dialog box, type DEVMGR_SHOW_NONPRESENT_DEVICES in the Variable Name text box and type 1 in the Variable Value text box. -
Serial Communication Buses
Computer Architecture 10 Serial Communication Buses Made wi th OpenOffi ce.org 1 Serial Communication SendingSending datadata oneone bitbit atat oneone time,time, sequentiallysequentially SerialSerial vsvs parallelparallel communicationcommunication cable cost (or PCB space), synchronization, distance ! speed ? ImprovedImproved serialserial communicationcommunication technologytechnology allowsallows forfor transfertransfer atat higherhigher speedsspeeds andand isis dominatingdominating thethe modernmodern digitaldigital technology:technology: RS232, RS-485, I2C, SPI, 1-Wire, USB, FireWire, Ethernet, Fibre Channel, MIDI, Serial Attached SCSI, Serial ATA, PCI Express, etc. Made wi th OpenOffi ce.org 2 RS232, EIA232 TheThe ElectronicElectronic IndustriesIndustries AllianceAlliance (EIA)(EIA) standardstandard RS-232-CRS-232-C (1969)(1969) definition of physical layer (electrical signal characteristics: voltage levels, signaling rate, timing, short-circuit behavior, cable length, etc.) 25 or (more often) 9-pin connector serial transmission (bit-by-bit) asynchronous operation (no clock signal) truly bi-directional transfer (full-duplex) only limited power can be supplied to another device numerous handshake lines (seldom used) many protocols use RS232 (e.g. Modbus) Made wi th OpenOffi ce.org 3 Voltage Levels RS-232RS-232 standardstandard convertconvert TTL/CMOS-levelTTL/CMOS-level signalssignals intointo bipolarbipolar voltagevoltage levelslevels toto improveimprove noisenoise immunityimmunity andand supportsupport longlong cablecable lengthslengths TTL/CMOS → RS232: 0V = logic zero → +3V…+12V (SPACE) +5V (+3.3V) = logic one → −3V…−12V (MARK) Some equipment ignores the negative level and accepts a zero voltage level as the "OFF" state The "dead area" between +3V and -3V may vary, many receivers are sensitive to differentials of 1V or less Made wi th OpenOffi ce.org 4 Data frame CompleteComplete one-byteone-byte frameframe consistsconsists of:of: start-bit (SPACE), data bits (7, 8), stop-bits (MARK) e.g.