The Action, the Lagrangian and Hamilton's Principle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rotational Motion (The Dynamics of a Rigid Body)
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body) Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body)" (1958). Robert Katz Publications. 141. https://digitalcommons.unl.edu/physicskatz/141 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 11 Rotational Motion (The Dynamics of a Rigid Body) 11-1 Motion about a Fixed Axis The motion of the flywheel of an engine and of a pulley on its axle are examples of an important type of motion of a rigid body, that of the motion of rotation about a fixed axis. Consider the motion of a uniform disk rotat ing about a fixed axis passing through its center of gravity C perpendicular to the face of the disk, as shown in Figure 11-1. The motion of this disk may be de scribed in terms of the motions of each of its individual particles, but a better way to describe the motion is in terms of the angle through which the disk rotates. -

Relativistic Dynamics
Chapter 4 Relativistic dynamics We have seen in the previous lectures that our relativity postulates suggest that the most efficient (lazy but smart) approach to relativistic physics is in terms of 4-vectors, and that velocities never exceed c in magnitude. In this chapter we will see how this 4-vector approach works for dynamics, i.e., for the interplay between motion and forces. A particle subject to forces will undergo non-inertial motion. According to Newton, there is a simple (3-vector) relation between force and acceleration, f~ = m~a; (4.0.1) where acceleration is the second time derivative of position, d~v d2~x ~a = = : (4.0.2) dt dt2 There is just one problem with these relations | they are wrong! Newtonian dynamics is a good approximation when velocities are very small compared to c, but outside of this regime the relation (4.0.1) is simply incorrect. In particular, these relations are inconsistent with our relativity postu- lates. To see this, it is sufficient to note that Newton's equations (4.0.1) and (4.0.2) predict that a particle subject to a constant force (and initially at rest) will acquire a velocity which can become arbitrarily large, Z t ~ d~v 0 f ~v(t) = 0 dt = t ! 1 as t ! 1 . (4.0.3) 0 dt m This flatly contradicts the prediction of special relativity (and causality) that no signal can propagate faster than c. Our task is to understand how to formulate the dynamics of non-inertial particles in a manner which is consistent with our relativity postulates (and then verify that it matches observation, including in the non-relativistic regime). -
OCC D 5 Gen5d Eee 1305 1A E
this cover and their final version of the extended essay to is are not is chose to write about applications of differential calculus because she found a great interest in it during her IB Math class. She wishes she had time to complete a deeper analysis of her topic; however, her busy schedule made it difficult so she is somewhat disappointed with the outcome of her essay. It was a pleasure meeting with when she was able to and her understanding of her topic was evident during our viva voce. I, too, wish she had more time to complete a more thorough investigation. Overall, however, I believe she did well and am satisfied with her essay. must not use Examiner 1 Examiner 2 Examiner 3 A research 2 2 D B introduction 2 2 c 4 4 D 4 4 E reasoned 4 4 D F and evaluation 4 4 G use of 4 4 D H conclusion 2 2 formal 4 4 abstract 2 2 holistic 4 4 Mathematics Extended Essay An Investigation of the Various Practical Uses of Differential Calculus in Geometry, Biology, Economics, and Physics Candidate Number: 2031 Words 1 Abstract Calculus is a field of math dedicated to analyzing and interpreting behavioral changes in terms of a dependent variable in respect to changes in an independent variable. The versatility of differential calculus and the derivative function is discussed and highlighted in regards to its applications to various other fields such as geometry, biology, economics, and physics. First, a background on derivatives is provided in regards to their origin and evolution, especially as apparent in the transformation of their notations so as to include various individuals and ways of denoting derivative properties. -

The Celestial Mechanics of Newton
GENERAL I ARTICLE The Celestial Mechanics of Newton Dipankar Bhattacharya Newton's law of universal gravitation laid the physical foundation of celestial mechanics. This article reviews the steps towards the law of gravi tation, and highlights some applications to celes tial mechanics found in Newton's Principia. 1. Introduction Newton's Principia consists of three books; the third Dipankar Bhattacharya is at the Astrophysics Group dealing with the The System of the World puts forth of the Raman Research Newton's views on celestial mechanics. This third book Institute. His research is indeed the heart of Newton's "natural philosophy" interests cover all types of which draws heavily on the mathematical results derived cosmic explosions and in the first two books. Here he systematises his math their remnants. ematical findings and confronts them against a variety of observed phenomena culminating in a powerful and compelling development of the universal law of gravita tion. Newton lived in an era of exciting developments in Nat ural Philosophy. Some three decades before his birth J 0- hannes Kepler had announced his first two laws of plan etary motion (AD 1609), to be followed by the third law after a decade (AD 1619). These were empirical laws derived from accurate astronomical observations, and stirred the imagination of philosophers regarding their underlying cause. Mechanics of terrestrial bodies was also being developed around this time. Galileo's experiments were conducted in the early 17th century leading to the discovery of the Keywords laws of free fall and projectile motion. Galileo's Dialogue Celestial mechanics, astronomy, about the system of the world was published in 1632. -

Time-Derivative Models of Pavlovian Reinforcement Richard S
Approximately as appeared in: Learning and Computational Neuroscience: Foundations of Adaptive Networks, M. Gabriel and J. Moore, Eds., pp. 497–537. MIT Press, 1990. Chapter 12 Time-Derivative Models of Pavlovian Reinforcement Richard S. Sutton Andrew G. Barto This chapter presents a model of classical conditioning called the temporal- difference (TD) model. The TD model was originally developed as a neuron- like unit for use in adaptive networks (Sutton and Barto 1987; Sutton 1984; Barto, Sutton and Anderson 1983). In this paper, however, we analyze it from the point of view of animal learning theory. Our intended audience is both animal learning researchers interested in computational theories of behavior and machine learning researchers interested in how their learning algorithms relate to, and may be constrained by, animal learning studies. For an exposition of the TD model from an engineering point of view, see Chapter 13 of this volume. We focus on what we see as the primary theoretical contribution to animal learning theory of the TD and related models: the hypothesis that reinforcement in classical conditioning is the time derivative of a compos- ite association combining innate (US) and acquired (CS) associations. We call models based on some variant of this hypothesis time-derivative mod- els, examples of which are the models by Klopf (1988), Sutton and Barto (1981a), Moore et al (1986), Hawkins and Kandel (1984), Gelperin, Hop- field and Tank (1985), Tesauro (1987), and Kosko (1986); we examine several of these models in relation to the TD model. We also briefly ex- plore relationships with animal learning theories of reinforcement, including Mowrer’s drive-induction theory (Mowrer 1960) and the Rescorla-Wagner model (Rescorla and Wagner 1972). -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Curriculum Overview Physics/Pre-AP 2018-2019 1St Nine Weeks
Curriculum Overview Physics/Pre-AP 2018-2019 1st Nine Weeks RESOURCES: Essential Physics (Ergopedia – online book) Physics Classroom http://www.physicsclassroom.com/ PHET Simulations https://phet.colorado.edu/ ONGOING TEKS: 1A, 1B, 2A, 2B, 2C, 2D, 2F, 2G, 2H, 2I, 2J,3E 1) SAFETY TEKS 1A, 1B Vocabulary Fume hood, fire blanket, fire extinguisher, goggle sanitizer, eye wash, safety shower, impact goggles, chemical safety goggles, fire exit, electrical safety cut off, apron, broken glass container, disposal alert, biological hazard, open flame alert, thermal safety, sharp object safety, fume safety, electrical safety, plant safety, animal safety, radioactive safety, clothing protection safety, fire safety, explosion safety, eye safety, poison safety, chemical safety Key Concepts The student will be able to determine if a situation in the physics lab is a safe practice and what appropriate safety equipment and safety warning signs may be needed in a physics lab. The student will be able to determine the proper disposal or recycling of materials in the physics lab. Essential Questions 1. How are safe practices in school, home or job applied? 2. What are the consequences for not using safety equipment or following safe practices? 2) SCIENCE OF PHYSICS: Glossary, Pages 35, 39 TEKS 2B, 2C Vocabulary Matter, energy, hypothesis, theory, objectivity, reproducibility, experiment, qualitative, quantitative, engineering, technology, science, pseudo-science, non-science Key Concepts The student will know that scientific hypotheses are tentative and testable statements that must be capable of being supported or not supported by observational evidence. The student will know that scientific theories are based on natural and physical phenomena and are capable of being tested by multiple independent researchers. -

Chapter 5 ANGULAR MOMENTUM and ROTATIONS
Chapter 5 ANGULAR MOMENTUM AND ROTATIONS In classical mechanics the total angular momentum L~ of an isolated system about any …xed point is conserved. The existence of a conserved vector L~ associated with such a system is itself a consequence of the fact that the associated Hamiltonian (or Lagrangian) is invariant under rotations, i.e., if the coordinates and momenta of the entire system are rotated “rigidly” about some point, the energy of the system is unchanged and, more importantly, is the same function of the dynamical variables as it was before the rotation. Such a circumstance would not apply, e.g., to a system lying in an externally imposed gravitational …eld pointing in some speci…c direction. Thus, the invariance of an isolated system under rotations ultimately arises from the fact that, in the absence of external …elds of this sort, space is isotropic; it behaves the same way in all directions. Not surprisingly, therefore, in quantum mechanics the individual Cartesian com- ponents Li of the total angular momentum operator L~ of an isolated system are also constants of the motion. The di¤erent components of L~ are not, however, compatible quantum observables. Indeed, as we will see the operators representing the components of angular momentum along di¤erent directions do not generally commute with one an- other. Thus, the vector operator L~ is not, strictly speaking, an observable, since it does not have a complete basis of eigenstates (which would have to be simultaneous eigenstates of all of its non-commuting components). This lack of commutivity often seems, at …rst encounter, as somewhat of a nuisance but, in fact, it intimately re‡ects the underlying structure of the three dimensional space in which we are immersed, and has its source in the fact that rotations in three dimensions about di¤erent axes do not commute with one another. -

Lie Time Derivative £V(F) of a Spatial Field F
Lie time derivative $v(f) of a spatial field f • A way to obtain an objective rate of a spatial tensor field • Can be used to derive objective Constitutive Equations on rate form D −1 Definition: $v(f) = χ? Dt (χ? (f)) Procedure in 3 steps: 1. Pull-back of the spatial tensor field,f, to the Reference configuration to obtain the corresponding material tensor field, F. 2. Take the material time derivative on the corresponding material tensor field, F, to obtain F_ . _ 3. Push-forward of F to the Current configuration to obtain $v(f). D −1 Important!|Note that the material time derivative, i.e. Dt (χ? (f)) is executed in the Reference configuration (rotation neutralized). Recall that D D χ−1 (f) = (F) = F_ = D F Dt ?(2) Dt v d D F = F(X + v) v d and hence, $v(f) = χ? (DvF) Thus, the Lie time derivative of a spatial tensor field is the push-forward of the directional derivative of the corresponding material tensor field in the direction of v (velocity vector). More comments on the Lie time derivative $v() • Rate constitutive equations must be formulated based on objective rates of stresses and strains to ensure material frame-indifference. • Rates of material tensor fields are by definition objective, since they are associated with a frame in a fixed linear space. • A spatial tensor field is said to transform objectively under superposed rigid body motions if it transforms according to standard rules of tensor analysis, e.g. A+ = QAQT (preserves distances under rigid body rotations). -
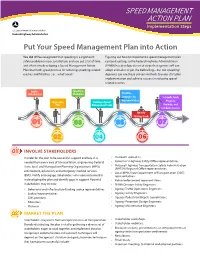
SPEED MANAGEMENT ACTION PLAN Implementation Steps
SPEED MANAGEMENT ACTION PLAN Implementation Steps Put Your Speed Management Plan into Action You did it! You recognized that speeding is a significant Figuring out how to implement a speed management plan safety problem in your jurisdiction, and you put a lot of time can be daunting, so the Federal Highway Administration and effort into developing a Speed Management Action (FHWA) has developed a set of steps that agency staff can Plan that holds great promise for reducing speeding-related adopt and tailor to get the ball rolling—but not speeding! crashes and fatalities. So…what’s next? Agencies can use these proven methods to jump start plan implementation and achieve success in reducing speed- related crashes. Involve Identify a Stakeholders Champion Prioritize Strategies for Set Goals, Track Implementation Market the Develop a Speed Progress, Plan Management Team Evaluate, and Celebrate Success Identify Strategy Leads INVOLVE STAKEHOLDERS In order for the plan to be successful, support and buy-in is • Outreach specialists. needed from every area of transportation: engineering (Federal, • Governor’s Highway Safety Office representatives. State, local, and Metropolitan Planning Organizations (MPO), • National Highway Transportation Safety Administration (NHTSA) Regional Office representatives. enforcement, education, and emergency medical services • Local/MPO/State Department of Transportation (DOT) (EMS). Notify and engage stakeholders who were instrumental representatives. in developing the plan and identify gaps in support. Potential • Police/enforcement representatives. stakeholders may include: • FHWA Division Safety Engineers. • Behavioral and infrastructure funding source representatives. • Agency Traffic Operations Engineers. • Judicial representatives. • Agency Safety Engineers. • EMS providers. • Agency Pedestrian/Bicycle Coordinators. • Educators. • Agency Pavement Design Engineers. -

Classical Particle Trajectories‡
1 Variational approach to a theory of CLASSICAL PARTICLE TRAJECTORIES ‡ Introduction. The problem central to the classical mechanics of a particle is usually construed to be to discover the function x(t) that describes—relative to an inertial Cartesian reference frame—the positions assumed by the particle at successive times t. This is the problem addressed by Newton, according to whom our analytical task is to discover the solution of the differential equation d2x(t) m = F (x(t)) dt2 that conforms to prescribed initial data x(0) = x0, x˙ (0) = v0. Here I explore an alternative approach to the same physical problem, which we cleave into two parts: we look first for the trajectory traced by the particle, and then—as a separate exercise—for its rate of progress along that trajectory. The discussion will cast new light on (among other things) an important but frequently misinterpreted variational principle, and upon a curious relationship between the “motion of particles” and the “motion of photons”—the one being, when you think about it, hardly more abstract than the other. ‡ The following material is based upon notes from a Reed College Physics Seminar “Geometrical Mechanics: Remarks commemorative of Heinrich Hertz” that was presented February . 2 Classical trajectories 1. “Transit time” in 1-dimensional mechanics. To describe (relative to an inertial frame) the 1-dimensional motion of a mass point m we were taught by Newton to write mx¨ = F (x) − d If F (x) is “conservative” F (x)= dx U(x) (which in the 1-dimensional case is automatic) then, by a familiar line of argument, ≡ 1 2 ˙ E 2 mx˙ + U(x) is conserved: E =0 Therefore the speed of the particle when at x can be described 2 − v(x)= m E U(x) (1) and is determined (see the Figure 1) by the “local depth E − U(x) of the potential lake.” Several useful conclusions are immediate. -

Newtonian Mechanics Is Most Straightforward in Its Formulation and Is Based on Newton’S Second Law
CLASSICAL MECHANICS D. A. Garanin September 30, 2015 1 Introduction Mechanics is part of physics studying motion of material bodies or conditions of their equilibrium. The latter is the subject of statics that is important in engineering. General properties of motion of bodies regardless of the source of motion (in particular, the role of constraints) belong to kinematics. Finally, motion caused by forces or interactions is the subject of dynamics, the biggest and most important part of mechanics. Concerning systems studied, mechanics can be divided into mechanics of material points, mechanics of rigid bodies, mechanics of elastic bodies, and mechanics of fluids: hydro- and aerodynamics. At the core of each of these areas of mechanics is the equation of motion, Newton's second law. Mechanics of material points is described by ordinary differential equations (ODE). One can distinguish between mechanics of one or few bodies and mechanics of many-body systems. Mechanics of rigid bodies is also described by ordinary differential equations, including positions and velocities of their centers and the angles defining their orientation. Mechanics of elastic bodies and fluids (that is, mechanics of continuum) is more compli- cated and described by partial differential equation. In many cases mechanics of continuum is coupled to thermodynamics, especially in aerodynamics. The subject of this course are systems described by ODE, including particles and rigid bodies. There are two limitations on classical mechanics. First, speeds of the objects should be much smaller than the speed of light, v c, otherwise it becomes relativistic mechanics. Second, the bodies should have a sufficiently large mass and/or kinetic energy.