To Download My Presentation Notes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 the Mighty Railgun I. Abstract the Idea of This Project Is to Build a Railgun
Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 The Mighty Railgun (All Bark no Bite) I. Abstract The idea of this project is to build a railgun capable of firing a small metal projectile at substantial velocity. The original plan was to build iterative prototypes capable of firing small projectiles, and using them to figure out the ideal design for the final version, but the smaller versions were not very successful due to their relative lack of power, so it was difficult to use them to learn what to do. The final, largest scale railgun is powered by a bank of capacitors with an equivalent capacitance of 24.6mF charged to around 350V. This produces 3013.5J of energy discharged over approximately 58.75 µs (it varies for each firing), drawing a peak of about 1425A when firing a projectile (it once again varies) and about 1600A when not firing a projectile (short circuiting the rails). The railgun is capable of consistently firing a small piece of metal (usually aluminum or copper); however the projectile does not usually travel very far, although this is hard to measure due to the nature of the gun and the speed at which the firing takes place. II. Introduction Electricity is often seemingly mysterious, but we have come to accept and understand how through the interaction of electric and magnetic fields we can create a simple motor, as we did in the first semester. A railgun is just a linear electric motor, at very high speeds. What makes it different, however, is that it uses neither magnets nor coils of wire, and relies entirely on the induced magnetic field in the rails due to the extremely large current to produce a Lorentz Force to propel the projectile (which will be discussed in greater depth in the theory section). -
A BRIEF INTRODUCTION to TUBULAR LINEAR MOTORS Linear Motors Provide Direct Thrust for Positioning a Payload, Eliminating the Need for Rotary-To-Linear Conversion
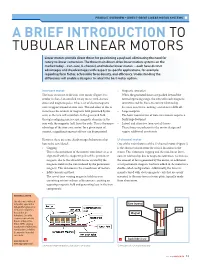
PRODUCT OVERVIEW – DIRECT-DRIVE LINEAR MOTOR SYSTEMS A BRIEF INTRODUCTION TO TUBULAR LINEAR MOTORS Linear motors provide direct thrust for positioning a payload, eliminating the need for rotary-to-linear conversion. The three main direct-drive linear motion systems on the market today – iron-core, U-channel, and tubular linear motors – each have distinct advantages and disadvantages with respect to specific applications, for example regarding form factor, achievable force density, and efficiency. Understanding the differences will enable a designer to select the best motor option. Iron-core motor • Magnetic saturation The basic structure of the iron-core motor (Figure 1) is When the generated forces are pushed beyond the similar to that of an unrolled rotary motor with discrete normal operating range, the iron will reach magnetic stator and magnetic poles. It has a set of electromagnetic saturation and the force-to-current relationship coils wrapped around an iron core. The end effect of this is becomes non-linear, making control more difficult. to increase the amount of magnetic field generated by the • Large footprint coils, as the iron will contribute to the generated field The basic construction of iron-core motors requires a through realigning microscopic magnetic domains in the fairly large footprint. iron with the magnetic field from the coils. This is the major • Lateral and attractive (non-useful) forces advantage of the iron-core motor: for a given input of These forces are inherent to the motor design and current, a significant amount of force can be generated. require additional constraints. However, there are some disadvantages/behaviours that U-channel motor have to be considered: One of the main features of the U-channel motor (Figure 2) • Cogging is the absence of iron from the critical locations in the This is the movement of the motor’s iron forcer so as to motor. -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

Overlapped Electromagnetic Coilgun for Low Speed Projectiles
ISSN (Print) 1226-1750 ISSN (Online) 2233-6656 Journal of Magnetics 20(3), 322-329 (2015) http://dx.doi.org/10.4283/JMAG.2015.20.3.322 Overlapped Electromagnetic Coilgun for Low Speed Projectiles Hany M. Mohamed1, Mahmoud A. Abdalla2*, Abdelazez Mitkees, and Waheed Sabery Electrical Engineering Branch, MTC College, Cairo, Egypt [email protected] [email protected] (Received 20 February 2015, Received in final form 16 June 2015, Accepted 16 June 2015) This paper presents a new overlapped coilgun configuration to launch medium weight projectiles. The proposed configuration consists of a two-stage coilgun with overlapped coil covers with spacing between them. The theoretical operation of a multi-stage coilgun is introduced, and a transient simulation was conducted for projectile motion through the launcher by using a commercial transient finite element software, ANSOFT MAXWELL. The excitation circuit design for each coilgun is reported, and the results indicate that the overlapped configuration increased the exit velocity relative to a non-overlapped configuration. Different configurations in terms of the optimum length and switching time were attempted for the proposed structure, and all of these cases exhibited an increase in the exit velocity. The exit velocity tends to increase by 27.2% relative to that of a non-overlapped coilgun of the same length. Keywords : electromagnetic launch, excitation circuit, lorentz force, overlapped coilgun 1. Introduction is not easy to obtain the main performance parameters and optimize the design [3]. Electromagnetic (EM) launch technology is a strong Sandia National Laboratories has succeeded in coilgun candidate to launch objects with high velocities over long design and operations by developing four guns with distances. -

An Introductory Electric Motors and Generators Experiment for a Sophomore Level Circuits Course
AC 2008-310: AN INTRODUCTORY ELECTRIC MOTORS AND GENERATORS EXPERIMENT FOR A SOPHOMORE-LEVEL CIRCUITS COURSE Thomas Schubert, University of San Diego Thomas F. Schubert, Jr. received his B.S., M.S., and Ph.D. degrees in electrical engineering from the University of California, Irvine, Irvine CA in 1968, 1969 and 1972 respectively. He is currently a Professor of electrical engineering at the University of San Diego, San Diego, CA and came there as a founding member of the engineering faculty in 1987. He previously served on the electrical engineering faculty at the University of Portland, Portland OR and Portland State University, Portland OR and on the engineering staff at Hughes Aircraft Company, Los Angeles, CA. Prof. Schubert is a member of IEEE and ASEE and is a registered professional engineer in Oregon. He currently serves as the faculty advisor for the Kappa Eta chapter of Eta Kappa Nu at the University of San Diego. Frank Jacobitz, University of San Diego Frank G. Jacobitz was born in Göttingen, Germany in 1968. He received his Diploma in physics from the Georg-August Universität, Göttingen, Germany in 1993, as well as M.S. and Ph.D. degrees in mechanical engineering from the University of California, San Diego, La Jolla, CA in 1995 and 1998, respectively. He is currently an Associate Professor of mechanical engineering at the University of San Diego, San Diego, CA since 2003. From 1998 to 2003, he was an Assistant Professor of mechanical engineering at the University of California, Riverside, Riverside, CA. He has also been a visitor with the Centre National de la Recherche Scientifique at the Université de Provence (Aix-Marseille I), France. -

Industrial Linear Motors
Industrial Linear Motors Smart solutions are driven by PRODUCT OVERVIEW www.linmot.com Precision and dynamics In the products and in the everyday life of NTI AG, these values are inseparable. NTI AG NTI AG is a global manufacturer of high quality tubular style linear motors and linear motor systems and thus focuses on the development, production and distribution of linear direct drives for use in industrial environments. Founded in 1993 as an independent business unit of the Sulzer Group, NTI AG has been in operation since 2000 as an independent company. NTI AG headquarters are located in Spreitenbach, near Zurich in Switzerland. In addition to three production sites in Switzerland and Slovakia, NTI AG maintains a sales and support office LinMot® USA Inc. to cover the Americas. Mission The brands LinMot® for industrial linear motors and MagSpring® for magnetic springs are offered LinMot offers its customers a sophisticated and dedicated linear to customers worldwide. NTI AG drive system that can be easily integrated into all leading control maintains an experienced customer systems. A high degree of standardization, delivery from stock and consultant sales and support a worldwide distribution network insure the immediate availability network of over 80 locations and excellent customer support. worldwide. For the realization of linear motion Our aim is to push linear direct drive technology and make it a NTI AG is always a competent and standard machine design element. We offer highly efficient drive reliable partner. solutions that make a major contribution to the overall resource conservation effort. 2 3 Linear Motors Position and Temperature sensors Electronic nameplate Stator Winding Slider with Neodynium Magnets Payload Mounting LinMot linear motors employ a direct electromagnetic principle. -

Methods for Improving Efficiency of Linear Induction Motor for Urban
512 Methods for Improving Efficiency of Linear Induction Motor for Urban Transit∗ Nobuo FUJII∗∗, Toshiyuki HOSHI∗∗ and Yuichi TANABE∗∗ To improve the efficiency of the linear induction motors (LIMs) for transportation, the compensation of end effect for LIM with the restriction of length and the long LIM with small end effect essentially are discussed respectively. Based on the proposed concept, the com- pensation method of the magnet rotator type and AC coil type of compensators are developed respectively. The utility is not yet confirmed. As for the long LIM with length of 10 m, the analysis shows that the efficiencies are about 85% at 40 km/h and above 90% at 360 km/h respectively. Key Words: Linear Motor, Linear Induction Motor, LIM, Linear Drives, Transportation, Traction, Subway, Electromagnetic Analysis, End Effect, Compensator length of LIM, the compensation of end effect is the only 1. Introduction method for remarkable improve of the characteristics. The In a part of new type transit, linear induction motors compensating winding method was proposed previous- (1) ff (LIMs) have been used as a direct electromagnetic drive ly , but it was not e ective. The authors have proposed ff (2) device without adhesion. In Japan, the LIM-driven train the new type of end e ect compensator . The proposed ff has been used in the subway in some large cities, as the method is based on the new concept that the end e ect can LIM reduces the construction cost of tunnel because the be compensated only by supplying the eddy current syn- thin shape makes the sectional area of tunnel small and the chronizing with the LIM frequency in front of LIM, which large gradability enables the minimum length of the route. -

Direct Torque Control of Induction Motors
DIRECT TORQUE CONTROL FOR INDUCTION MOTOR DRIVES MAIN FEATURES OF DTC · Decoupled control of torque and flux · Absence of mechanical transducers · Current regulator, PWM pulse generation, PI control of flux and torque and co-ordinate transformation are not required · Very simple control scheme and low computational time · Reduced parameter sensitivity BLOCK DIAGRAM OF DTC SCHEME + _ s* s j s + Djs _ Voltage Vector s * T + j s DT Selection _ T S S S s Stator a b c Torque j s s E Flux vs 2 Estimator Estimator 3 s is 2 i b i a 3 Induction Motor In principle the DTC method selects one of the six nonzero and two zero voltage vectors of the inverter on the basis of the instantaneous errors in torque and stator flux magnitude. MAIN TOPICS Þ Space vector representation Þ Fundamental concept of DTC Þ Rotor flux reference Þ Voltage vector selection criteria Þ Amplitude of flux and torque hysteresis band Þ Direct self control (DSC) Þ SVM applied to DTC Þ Flux estimation at low speed Þ Sensitivity to parameter variations and current sensor offsets Þ Conclusions INVERTER OUTPUT VOLTAGE VECTORS I Sw1 Sw3 Sw5 E a b c Sw2 Sw4 Sw6 Voltage-source inverter (VSI) For each possible switching configuration, the output voltages can be represented in terms of space vectors, according to the following equation æ 2p 4p ö s 2 j j v = ç v + v e 3 + v e 3 ÷ s ç a b c ÷ 3 è ø where va, vb and vc are phase voltages. -

An Engineering Guide to Soft Starters
An Engineering Guide to Soft Starters Contents 1 Introduction 1.1 General 1.2 Benefits of soft starters 1.3 Typical Applications 1.4 Different motor starting methods 1.5 What is the minimum start current with a soft starter? 1.6 Are all three phase soft starters the same? 2 Soft Start and Soft Stop Methods 2.1 Soft Start Methods 2.2 Stop Methods 2.3 Jog 3 Choosing Soft Starters 3.1 Three step process 3.2 Step 1 - Starter selection 3.3 Step 2 - Application selection 3.4 Step 3 - Starter sizing 3.5 AC53a Utilisation Code 3.6 AC53b Utilisation Code 3.7 Typical Motor FLCs 4 Applying Soft Starters/System Design 4.1 Do I need to use a main contactor? 4.2 What are bypass contactors? 4.3 What is an inside delta connection? 4.4 How do I replace a star/delta starter with a soft starter? 4.5 How do I use power factor correction with soft starters? 4.6 How do I ensure Type 1 circuit protection? 4.7 How do I ensure Type 2 circuit protection? 4.8 How do I select cable when installing a soft starter? 4.9 What is the maximum length of cable run between a soft starter and the motor? 4.10 How do two-speed motors work and can I use a soft starter to control them? 4.11 Can one soft starter control multiple motors separately for sequential starting? 4.12 Can one soft starter control multiple motors for parallel starting? 4.13 Can slip-ring motors be started with a soft starter? 4.14 Can soft starters reverse the motor direction? 4.15 What is the minimum start current with a soft starter? 4.16 Can soft starters control an already rotating motor (flying load)? 4.17 Brake 4.18 What is soft braking and how is it used? 5 Digistart Soft Starter Selection 5.1 Three step process 5.2 Starter selection 5.3 Application selection 5.4 Starter sizing 1. -

The Fundamentals of Ac Electric Induction Motor Design and Application
THE FUNDAMENTALS OF AC ELECTRIC INDUCTION MOTOR DESIGN AND APPLICATION by Edward J. Thornton Electrical Consultant E. I. du Pont de Nemours Houston, Texas and J. Kirk Armintor Senior Account Sales Engineer Rockwell Automation The Woodlands, Texas Edward J. (Ed) Thornton is an Electrical Electrical Mechanical Consultant in the Electrical Technology Coupling System Field System Consulting Group in Engineering at DuPont, in Houston, Texas. His specialty is the design, operation, and maintenance of electric power distribution systems and large motor installations. He has 20 years E , I T , w of consulting experience with DuPont. Mr. Thornton received his B.S. degree Figure 1. Block Representation of Energy Conversion for Motors. (Electrical Engineering, 1978) from Virginia Polytechnic Institute and State University. The coupling magnetic field is key to the operation of electrical He is a registered Professional Engineer in the State of Texas. apparatus such as induction motors. The fundamental laws associated with the relationship between electricity and magnetism were derived from experiments conducted by several key scientists J. Kirk Armintor is a Senior Account in the 1800s. Sales Engineer in the Rockwell Automation Houston District Office, in The Woodlands, Basic Design and Theory of Operation Texas. He has 32 years’ experience with The alternating current (AC) induction motor is one of the most motor applications in the petroleum, rugged and most widely used machines in industry. There are two chemical, paper, and pipeline industries. major components of an AC induction motor. The stationary or He has authored technical papers on motor static component is the stator. The rotating component is the rotor. -

Permanent Magnet DC Motors Catalog
Catalog DC05EN Permanent Magnet DC Motors Drives DirectPower Series DA-Series DirectPower Plus Series SC-Series PRO Series www.electrocraft.com www.electrocraft.com For over 60 years, ElectroCraft has been helping engineers translate innovative ideas into reality – one reliable motor at a time. As a global specialist in custom motor and motion technology, we provide the engineering capabilities and worldwide resources you need to succeed. This guide has been developed as a quick reference tool for ElectroCraft products. It is not intended to replace technical documentation or proper use of standards and codes in installation of product. Because of the variety of uses for the products described in this publication, those responsible for the application and use of this product must satisfy themselves that all necessary steps have been taken to ensure that each application and use meets all performance and safety requirements, including all applicable laws, regulations, codes and standards. Reproduction of the contents of this copyrighted publication, in whole or in part without written permission of ElectroCraft is prohibited. Designed by stilbruch · www.stilbruch.me ElectroCraft DirectPower™, DirectPower™ Plus, DA-Series, SC-Series & PRO Series Drives 2 Table of Contents Typical Applications . 3 Which PMDC Motor . 5 PMDC Drive Product Matrix . .6 DirectPower Series . 7 DP20 . 7 DP25 . 9 DP DP30 . 11 DirectPower Plus Series . 13 DPP240 . 13 DPP640 . 15 DPP DPP680 . 17 DPP700 . 19 DPP720 . 21 DA-Series. 23 DA43 . 23 DA DA47 . 25 SC-Series . .27 SCA-L . .27 SCA-S . .29 SC SCA-SS . 31 PRO Series . 33 PRO-A04V36 . 35 PRO-A08V48 . 37 PRO PRO-A10V80 . -

Abstract Controlling Ac Motor Using Arduino
ABSTRACT CONTROLLING AC MOTOR USING ARDUINO MICROCONTROLLER Nithesh Reddy Nannuri, M.S. Department of Electrical Engineering Northern Illinois University, 2014 Donald S Zinger, Director Space vector modulation (SVM) is a technique used for generating alternating current waveforms to control pulse width modulation signals (PWM). It provides better results of PWM signals compared to other techniques. CORDIC algorithm calculates hyperbolic and trigonometric functions of sine, cosine, magnitude and phase using bit shift, addition and multiplication operations. This thesis implements SVM with Arduino microcontroller using CORDIC algorithm. This algorithm is used to calculate the PWM timing signals which are used to control the motor. Comparison of the time taken to calculate sinusoidal signal using Arduino and CORDIC algorithm was also done. NORTHERN ILLINOIS UNIVERSITY DEKALB, ILLINOIS DECEMBER 2014 CONTROLLING AC MOTOR USING ARDUINO MICROCONTROLLER BY NITHESH REDDY NANNURI ©2014 Nithesh Reddy Nannuri A THESIS SUBMITTED TO THE GRADUATE SCHOOL IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE MASTER OF SCIENCE DEPARTMENT OF ELECTRICAL ENGINEERING Thesis Director: Dr. Donald S Zinger ACKNOWLEDGEMENTS I would like to express my sincere gratitude to Dr. Donald S. Zinger for his continuous support and guidance in this thesis work as well as throughout my graduate study. I would like to thank Dr. Martin Kocanda and Dr. Peng-Yung Woo for serving as members of my thesis committee. I would like to thank my family for their unconditional love, continuous support, enduring patience and inspiring words. Finally, I would like to thank my friends and everyone who has directly or indirectly helped me for their cooperation in completing the thesis.