Using Embedded Xinu and the Raspberry Pi 3 to Teach Operating Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Dennis Brylow in Theory, Simulating an Operating System Is the Same As the Real Thing. in Practice, It Is N
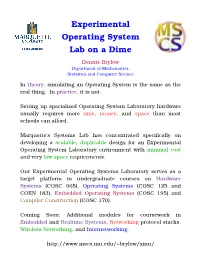
Experimental Operating System Lab on a Dime Dennis Brylow Department of Mathematics, Statistics and Computer Science In theory, simulating an Operating System is the same as the real thing. In practice, it is not. Setting up specialized Operating System Laboratory hardware usually requires more time, money, and space than most schools can afford. Marquette©s Systems Lab has concentrated specifically on developing a scalable, duplicable design for an Experimental Operating System Laboratory environment with minimal cost and very low space requirements. Our Experimental Operating Systems Laboratory serves as a target platform in undergraduate courses on Hardware Systems (COSC 065), Operating Systems (COSC 125 and COEN 183), Embedded Operating Systems (COSC 195) and Compiler Construction (COSC 170). Coming Soon: Additional modules for coursework in Embedded and Realtime Systems, Networking protocol stacks, Wireless Networking, and Internetworking . http://www.mscs.mu.edu/~brylow/xinu/ XINU in the 21st Century Purdue University©s XINU Operating System has been successfully deployed in classrooms, research labs, and commercial products for more than 20 years. Marquette University presents a new reimplementation of XINU, targeted to modern RISC architectures, written in ANSI-compliant C, and particularly well-suited to embedded platforms with scarce resources. Special Purpose Serial Consoles XINU Backends Serial Annex (optional) Private Network Marquette©s Systems Lab General Purpose runs XINU on inexpensive Laboratory Workstations wireless routers containing XINU the Embedded MIPS32 Server processor. Production Network XINU Backends XINU Server XINU Frontends Backend targets upload student kernel General purpose server with multiple General purpose computer laboratory over private network on boot, run O/S network interfaces manages a private workstations can compile the XINU directly. -

Using TOST in Teaching Operating Systems and Concurrent Programming Concepts
Advances in Science, Technology and Engineering Systems Journal Vol. 5, No. 6, 96-107 (2020) ASTESJ www.astesj.com ISSN: 2415-6698 Special Issue on Multidisciplinary Innovation in Engineering Science & Technology Using TOST in Teaching Operating Systems and Concurrent Programming Concepts Tzanko Golemanov*, Emilia Golemanova Department of Computer Systems and Technologies, University of Ruse, Ruse, 7020, Bulgaria A R T I C L E I N F O A B S T R A C T Article history: The paper is aimed as a concise and relatively self-contained description of the educational Received: 30 July, 2020 environment TOST, used in teaching and learning Operating Systems basics such as Accepted: 15 October, 2020 Processes, Multiprogramming, Timesharing, Scheduling strategies, and Memory Online: 08 November, 2020 management. TOST also aids education in some important IT concepts such as Deadlock, Mutual exclusion, and Concurrent processes synchronization. The presented integrated Keywords: environment allows the students to develop and run programs in two simple programming Operating Systems languages, and at the same time, the data in the main system tables can be monitored. The Concurrent Programming paper consists of a description of TOST system, the features of the built-in programming Teaching Tools languages, and demonstrations of teaching the basic Operating Systems principles. In addition, some of the well-known concurrent processing problems are solved to illustrate TOST usage in parallel programming teaching. 1. Introduction • Visual OS simulators This paper is an extension of work originally presented in 29th The systems from the first group (MINIX [2], Nachos [3], Xinu Annual Conference of the European Association for Education in [4], Pintos [5], GeekOS [6]) run on real hardware and are too Electrical and Information Engineering (EAEEIE) [1]. -

Porting the Embedded Xinu Operating System to the Raspberry Pi Eric Biggers Macalester College, [email protected]
Macalester College DigitalCommons@Macalester College Mathematics, Statistics, and Computer Science Mathematics, Statistics, and Computer Science Honors Projects 5-2014 Porting the Embedded Xinu Operating System to the Raspberry Pi Eric Biggers Macalester College, [email protected] Follow this and additional works at: https://digitalcommons.macalester.edu/mathcs_honors Part of the OS and Networks Commons, Software Engineering Commons, and the Systems Architecture Commons Recommended Citation Biggers, Eric, "Porting the Embedded Xinu Operating System to the Raspberry Pi" (2014). Mathematics, Statistics, and Computer Science Honors Projects. 32. https://digitalcommons.macalester.edu/mathcs_honors/32 This Honors Project - Open Access is brought to you for free and open access by the Mathematics, Statistics, and Computer Science at DigitalCommons@Macalester College. It has been accepted for inclusion in Mathematics, Statistics, and Computer Science Honors Projects by an authorized administrator of DigitalCommons@Macalester College. For more information, please contact [email protected]. MACALESTER COLLEGE HONORS PAPER IN COMPUTER SCIENCE Porting the Embedded Xinu Operating System to the Raspberry Pi Author: Advisor: Eric Biggers Shilad Sen May 5, 2014 Abstract This thesis presents a port of a lightweight instructional operating system called Em- bedded Xinu to the Raspberry Pi. The Raspberry Pi, an inexpensive credit-card-sized computer, has attracted a large community of hobbyists, researchers, and educators since its release in 2012. However, the system-level software running on the Raspberry Pi has been restricted to two ends of a spectrum: complex modern operating systems such as Linux at one end, and very simple hobbyist operating systems or simple “bare-metal” programs at the other end. -
Real-Time Transport of Internet Telephony Service Utilizing Embedded Resource-Constrained Systems Kyle Persohn Marquette University
Marquette University e-Publications@Marquette Master's Theses (2009 -) Dissertations, Theses, and Professional Projects Real-Time Transport of Internet Telephony Service Utilizing Embedded Resource-Constrained Systems Kyle Persohn Marquette University Recommended Citation Persohn, Kyle, "Real-Time Transport of Internet Telephony Service Utilizing Embedded Resource-Constrained Systems" (2012). Master's Theses (2009 -). Paper 162. http://epublications.marquette.edu/theses_open/162 REAL-TIME TRANSPORT OF INTERNET TELEPHONY SERVICE UTILIZING EMBEDDED RESOURCE-CONSTRAINED SYSTEMS by Kyle Persohn A Thesis Submitted to the Faculty of the Graduate School, Marquette University, in Partial Fulfillment of the Requirements for the Degree of Master of Science Milwaukee, Wisconsin August 2012 ABSTRACT REAL-TIME TRANSPORT OF INTERNET TELEPHONY SERVICE UTILIZING EMBEDDED RESOURCE-CONSTRAINED SYSTEMS Kyle Persohn Marquette University, 2012 This thesis presents a real-time framework for resource-constrained devices that improves the listening quality of Voice over Internet Protocol calls transported over congested networks. Many VoIP standards and implementations exist, but gaps in the design space encourage further exploration that previous work fails to address. We describe an experimental hardware platform that expands upon a previous design to accommodate technical research and educational needs. Our framework, based on the Real-Time Transport Protocol, integrates closely with existing software constructs available in the Embedded Xinu operating system. We offer features derived from RTP by means of a kernel device that alleviates an application from directly interacting with the underlying protocol. An example application based on Xinu's RTP implementation demonstrates measurable robustness to packet loss and delay variation (jitter)|adverse conditions affecting networks used for VoIP, such as the Internet. -

Proving Safety Properties of Software Kang Gui Iowa State University
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Digital Repository @ Iowa State University Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2012 Proving safety properties of software Kang Gui Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Computer Engineering Commons, and the Computer Sciences Commons Recommended Citation Gui, Kang, "Proving safety properties of software" (2012). Graduate Theses and Dissertations. 12335. https://lib.dr.iastate.edu/etd/12335 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Proving safety properties of software by Kang Gui A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: Computer Engineering Program of Study Committee: Suraj C. Kothari, Major Professor Srinivas Aluru Tien Nguyen Manimaran Govindarasu Samik Basu Iowa State University Ames, Iowa 2012 Copyright c Kang Gui, 2012. All rights reserved. ii DEDICATION To my parents Yousheng Gui and Jianping Chang iii TABLE OF CONTENTS LIST OF TABLES . vi LIST OF FIGURES . vii ACKNOWLEDGEMENTS . ix ABSTRACT . x CHAPTER 1. OVERVIEW . 1 1.1 Dissertation Outline . .3 CHAPTER 2. RELATED WORKS . 5 2.1 Finding Defects of Large Source Code . .5 2.2 Graph Based Program Analysis . -

CIS 415 Operating Systems Course Topics Course Goals Course
Course Topics • The role of OS as resource manager; as Welcome to CIS 415 interface between user/pgms and underlying Operating Systems hardware • Emphasis on principles, algorithms, Winter 2006 mechanisms Instructor: Ginnie Lo • Unix/Linux/Windows case study GTF: Dayi Zhou Website: http://www.cs.uoregon.edu/classes/cis415 Course Goals Course Structure • Cover what every CIS graduate should know • Lecture: Mon. and Wed. 2-3:20 about OS - fundamentals Focused lectures, Q/A, exercises, drama, • Appreciation of the astounding complexity of the OS - what it does, how it does it food, 2 midterm exams • Hone your problem solving skills, performance analysis, algorithm development • Discussion Sections: Quizzes, practice • Enable you to apply what you learn to more complex and future OS problems, solutions, programming • Stimulate your interest in learning more about OS assignments Course Workload Teaching Philosophy • Homework/quizzes - 20% • Maximize your opportunity to perform at individual and group problems your best no late assignments, drop lowest grade h, q • Group learning • Programming assignments - 20% • Learning is enjoyable one individual, one group • High expectations of you as a student • Two Midterms - 15 % each, total 30% • High expectations of me as teacher • Final - 30% • Feeding you (a great motivator) 1 Course Materials And now the first food item …. • Operating System Concepts, 7th Edition by Silbershatz, Galvin, and Gagne (6th edition is OK, get reading list) ß Online lecture slides from the textbook (ch#.pdf) ß My own online lecture slides (topic.pdf) ß Handouts: in class worksheets and readings Why an onion??? OS Layered Structure Layered Approach Access to OS Services • The operating system is divided into a •Process Management number of layers (levels), each built on top •Memory Management of lower layers. -

A Graph-Theoretic Method to Verifying Source and Binary Control Flow Equivalence
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2021 Trust, transforms, and control flow: A graph-theoretic method to verifying source and binary control flow equivalence Ryan Christopher Goluch Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Recommended Citation Goluch, Ryan Christopher, "Trust, transforms, and control flow: A graph-theoretic method to verifying source and binary control flow equivalence" (2021). Graduate Theses and Dissertations. 18498. https://lib.dr.iastate.edu/etd/18498 This Thesis is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Trust, transforms, and control flow: A graph-theoretic method to verifying source and binary control flow equivalence by Ryan Christopher Goluch A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Computer Engineering (Secure and Reliable Computing) Program of Study Committee: Suresh Kothari, Major Professor Samik Basu Akhilesh Tyagi The student author, whose presentation of the scholarship herein was approved by the program of study committee, is solely responsible for the content of this thesis. The Graduate College will ensure this thesis is globally accessible and will not permit alterations after a degree is conferred. Iowa State University Ames, Iowa 2021 Copyright © Ryan Christopher Goluch, 2021. All rights reserved. ii DEDICATION I would like to dedicate this work to my family, friends, colleagues, and mentors. -

Jargon File, Version 4.0.0, 24 Jul 1996
JARGON FILE, VERSION 4.0.0, 24 JUL 1996 This is the Jargon File, a comprehensive compendium of hacker slang illuminating many aspects of hackish tradition, folklore, and humor. This document (the Jargon File) is in the public domain, to be freely used, shared, and modified. There are (by intention) no legal restraints on what you can do with it, but there are traditions about its proper use to which many hackers are quite strongly attached. Please extend the courtesy of proper citation when you quote the File, ideally with a version number, as it will change and grow over time. (Examples of appropriate citation form: "Jargon File 4.0.0" or "The on-line hacker Jargon File, version 4.0.0, 24 JUL 1996".) The Jargon File is a common heritage of the hacker culture. Over the years a number of individuals have volunteered considerable time to maintaining the File and been recognized by the net at large as editors of it. Editorial responsibilities include: to collate contributions and suggestions from others; to seek out corroborating information; to cross-reference related entries; to keep the file in a consistent format; and to announce and distribute updated versions periodically. Current volunteer editors include: Eric Raymond [email protected] Although there is no requirement that you do so, it is considered good form to check with an editor before quoting the File in a published work or commercial product. We may have additional information that would be helpful to you and can assist you in framing your quote to reflect not only the letter of the File but its spirit as well. -
Embedded Xinu Documentation Release Master
Embedded Xinu Documentation Release master Douglas Comer, Dennis Brylow, and others March 03, 2015 Contents 1 Introduction 1 1.1 Getting started..............................................1 1.2 Teaching with Embedded Xinu.....................................1 1.3 Supported platforms...........................................2 1.4 The original Xinu............................................2 2 Getting started with Embedded Xinu3 2.1 Downloading the source code......................................3 2.2 Choosing a platform...........................................4 2.3 Setting up a cross-compiler.......................................4 2.4 Compiling Embedded Xinu.......................................6 2.5 Next steps................................................7 2.6 Other resources..............................................8 3 Components and Features (platform independent)9 3.1 Preemptive multitasking.........................................9 3.2 Shell................................................... 10 3.3 TTY driver................................................ 14 3.4 Memory management.......................................... 15 3.5 Message passing............................................. 17 3.6 Mailboxes................................................ 17 3.7 Standard C Library............................................ 18 3.8 Networking................................................ 19 3.9 USB................................................... 31 3.10 USB keyboard driver.......................................... -

C. Matthew Curtin: Curriculum Vitæ 2
Interhack VOX +1 614 545 HACK 5 E Long St 9th Fl FAX +1 614 545 0076 Columbus, OH 43215 WEB http://web.interhack.com/ C. Matthew Curtin Summary of Expertise Computer Science in Adjudication Active as a forensic computer scientist since early 2000. Experi- ence includes routine electronic discovery, litigation consulting, and work as an expert witness in civil, criminal, and adminis- trative actions. Frequently deliver CLE and CJE credit seminars to attorneys and judges on the use of electronic information in adjudication. Cybersecurity Consultant to complex information security projects involving incident response, regulatory compliance, and analysis of security program and control effectiveness. Responsible for design and implementation of early Internet and Web security systems. Operating Systems Extensive experience in systems implementation, drawing upon theory and practice of operating systems. Applications include customization to optimize function, user experience, security, and performance. Experience teaching operating systems implementa- tion at the university level. Programming Languages Broad experience in many languages including Lisp, Perl, Java, C, various languages for UNIX systems, data processing, text markup, and more. Fifteen years’ experience teaching use of pro- gramming languages at university level. Protocols Expert in many widely-used Internet protocols, including devel- opment of systems using a variety of networking protocols, and participation in standards-setting workgroups. c. matthew curtin: curriculum vitæ 2 Experience Interhack Corporation Founder, CEO 1997–Present Founded and built firm from self-funded research group to for-profit consulting firm with practice areas in cybersecurity and computer expert services. Some highlights include: • Analysis of Data Loss Incidents Research Coäuthored original research showing how data loss incidents take place broadly and per industry. -

Cubeos a Component-Based Operating System for Autonomous Systems
CUBEOS A COMPONENT-BASED OPERATING SYSTEM FOR AUTONOMOUS SYSTEMS HOLGER KENN ARTIFICIAL INTELLIGENCE LABORATORY VRIJE UNIVERSITEIT BRUSSEL AUGUST 2001 CUBEOS A COMPONENT-BASED OPERATING SYSTEM FOR AUTONOMOUS SYSTEMS HOLGER KENN ARTIFICIAL INTELLIGENCE LABORATORY VRIJE UNIVERSITEIT BRUSSEL PROEFSCHRIFT VOORGELEGD VOOR HET BEHALEN VAN DE ACADEMISCHE GRAAD VAN DOCTOR IN DE WETENSCHAPPEN, IN HET OPENBAAR TE VERDEDIGEN OP 27 AUGUSTUS 2001 Promotiecommissie: PROMOTOR: PROF. DR. L.STEELS, VRIJE UNIVERSITEIT BRUSSEL VOORZITTER: PROF. DR. D.VERMEIR, VRIJE UNIVERSITEIT BRUSSEL SECRETARIS : PROF. DR. A.BIRK, VRIJE UNIVERSITEIT BRUSSEL OVERIGE LEDEN: PROF. DR. KURT MEHLHORN, MPI FUR¨ INFORMATIK, SAARBRUCKEN¨ DR. H.BRUYNINCKX, KATHOLIEKE UNIVERSITEIT LEUVEN PROF. DR. H.SAHLI, VRIJE UNIVERSITEIT BRUSSEL Acknowledgments First, I want to thank my advisors. Andreas Birk gave me the opportunity to work with him in an international environment on the topic of autonomous systems and artificial intelligence al- though I had not worked in this area before. During my time in his research group, I could com- plete my knowledge in computer architecture and system software engineering and I learned many new and interesting things from the research on the origins of intelligence. Also, I am very grateful for the opportunity to work with Luc Steels in his AI Lab. Although I am not directly involved in his research on the origins of language, I had many fruitful discussions with him and with other members of the lab over related topics and again, I learned a lot. Also, I want to thank Prof. Dr. Kurt Mehlhorn and Dr. Ir. Herman Bruyninckx who agreed to act as external members of the Ph.D. -

Linux/UNIX System Programming Fundamentals
Linux/UNIX System Programming Fundamentals Michael Kerrisk man7.org NDC TechTown; August 2020 ©2020, man7.org Training and Consulting / Michael Kerrisk. All rights reserved. These training materials have been made available for personal, noncommercial use. Except for personal use, no part of these training materials may be printed, reproduced, or stored in a retrieval system. These training materials may not be redistributed by any means, electronic, mechanical, or otherwise, without prior written permission of the author. These training materials may not be used to provide training to others without prior written permission of the author. Every effort has been made to ensure that the material contained herein is correct, including the development and testing of the example programs. However, no warranty is expressed or implied, and the author shall not be liable for loss or damage arising from the use of these programs. The programs are made available under Free Software licenses; see the header comments of individual source files for details. For information about this course, visit http://man7.org/training/. For inquiries regarding training courses, please contact us at [email protected]. Please send corrections and suggestions for improvements to this course material to [email protected]. For information about The Linux Programming Interface, please visit http://man7.org/tlpi/. Short table of contents 1 Course Introduction 1-1 2 Fundamental Concepts 2-1 3 File I/O and Files 3-1 4 Directories and Links 4-1 5 Processes 5-1 6 Signals: