Bathymetric Atlas and Website for the Northwestern Hawaiian Islands
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geology of Hawaii Reefs
11 Geology of Hawaii Reefs Charles H. Fletcher, Chris Bochicchio, Chris L. Conger, Mary S. Engels, Eden J. Feirstein, Neil Frazer, Craig R. Glenn, Richard W. Grigg, Eric E. Grossman, Jodi N. Harney, Ebitari Isoun, Colin V. Murray-Wallace, John J. Rooney, Ken H. Rubin, Clark E. Sherman, and Sean Vitousek 11.1 Geologic Framework The eight main islands in the state: Hawaii, Maui, Kahoolawe , Lanai , Molokai , Oahu , Kauai , of the Hawaii Islands and Niihau , make up 99% of the land area of the Hawaii Archipelago. The remainder comprises 11.1.1 Introduction 124 small volcanic and carbonate islets offshore The Hawaii hot spot lies in the mantle under, or of the main islands, and to the northwest. Each just to the south of, the Big Island of Hawaii. Two main island is the top of one or more massive active subaerial volcanoes and one active submarine shield volcanoes (named after their long low pro- volcano reveal its productivity. Centrally located on file like a warriors shield) extending thousands of the Pacific Plate, the hot spot is the source of the meters to the seafloor below. Mauna Kea , on the Hawaii Island Archipelago and its northern arm, the island of Hawaii, stands 4,200 m above sea level Emperor Seamount Chain (Fig. 11.1). and 9,450 m from seafloor to summit, taller than This system of high volcanic islands and asso- any other mountain on Earth from base to peak. ciated reefs, banks, atolls, sandy shoals, and Mauna Loa , the “long” mountain, is the most seamounts spans over 30° of latitude across the massive single topographic feature on the planet. -

Photographing the Islands of Hawaii
Molokai Sea Cliffs - Molokai, Hawaii Photographing the Islands of Hawaii by E.J. Peiker Introduction to the Hawaiian Islands The Hawaiian Islands are an archipelago of eight primary islands and many atolls that extend for 1600 miles in the central Pacific Ocean. The larger and inhabited islands are what we commonly refer to as Hawaii, the 50 th State of the United States of America. The main islands, from east to west, are comprised of the Island of Hawaii (also known as the Big Island), Maui, Kahoolawe, Molokai, Lanai, Oahu, Kauai, and Niihau. Beyond Niihau to the west lie the atolls beginning with Kaula and extending to Kure Atoll in the west. Kure Atoll is the last place on Earth to change days and the last place on Earth to ring in the new year. The islands of Oahu, Maui, Kauai and Hawaii (Big Island) are the most visited and developed with infrastructure equivalent to much of the civilized world. Molokai and Lanai have very limited accommodation options and infrastructure and have far fewer people. All six of these islands offer an abundance of photographic possibilities. Kahoolawe and Niihau are essentially off-limits. Kahoolawe was a Navy bombing range until recent years and has lots of unexploded ordinance. It is possible to go there as part of a restoration mission but one cannot go there as a photo destination. Niihau is reserved for the very few people of 100% Hawaiian origin and cannot be visited for photography if at all. Neither have any infrastructure. Kahoolawe is photographable from a distance from the southern shores of Maui and Niihau can be seen from the southwestern part of Kauai. -

Nihoa Manawai Holoikauaua Pearl & Hermes Atoll Kapou Papa'āpoho Lisianski Island Kamole Kauō Laysan Island Kamokuokamohoali'i Ko'anako'a Maro Reef
175°E 180° 175°W 170°W 165°W 160°W 155°W 150°W 35°N 35°N North America Japan Map Area Photo by Dan Clark/USFWS Hawaiian Islands Photo by Na‘alehu Anthony P a c i f i c Seabird Refuge A Living Hawaiian Culture O c e a n The monument is home to over 14 million seabirds 30°N Hiryū USS Yorktown Equator representing 23 species. This includes the world's Traditional Hawaiian accounts describe largest colonies of Laysan and black-footed Papahānaumokuākea as a sacred area from which Rapa Sōryū albatross. Pictured above is the world's oldest life first emerged and to which spirits return after Nui Australia known bird in the wild – a Laysan albatross named 30°N death. Akagi Wisdom! Banded in 1956 when she was at least five Kaga years old, Wisdom may have hatched more than 36 New Zealand chicks in her lifetime. Hōlanikū Manawai Unnamed Holoikauaua Mokupāpapa Seamount Kure Atoll Pearl & Hermes Atoll 582,578 square miles, only six square miles of land Helsley Seamount Ladd Seamount Kamole Kauō ‘Ōnūnui, ‘Ōnūiki Photo by Mark Sullivan/NOAA Laysan Island Photo by NOAA/OER Endemic Sanctuary Pūhāhonu New Discoveries The monument is home to many species found Kuaihelani Gardner Pinnacles The majority of the seafloor in the Northwestern nowhere else on Earth and is a critically important Pihemanu Salmon Hawaiian Islands lies at depths below 10,000 feet nesting ground for green sea turtles and breeding Bank (3,000 meters). Using advanced technologies like ground for Hawaiian monk seals. -
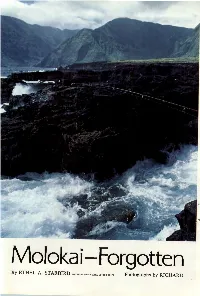
Molokai Hawaii Forgotten
Molokai -Forgotten By ETHEL A. STARBIRD NATIONAL GEOGRAPHic sENIOR STAFF Photographs by RICHARD Casting away care, Sister Richard Marie takes a day off near Molokai's leprosy hospital, where she has worked Hawaii since 1960. Independent, resourceful, generous, she shares the best qualities A. COOKE III of Hawaii's most unspoiled major island. 189 Like thirsty giants, the volcanic peaks of Molokai's eastern end steal rainfall from its flat, dry western end. Polynesians from the Marquesas Islands came to Hawaii about 1,200 years ago. They eventually settled on this island in numbers National Geographic, August 1981 far greater than today'll 6,000 population. The semicircular walls of coral and basalt seen in the shallow waters in the foreground enclose fishponds once used to capture and fatten mullet and other saltwater species for island royalty. Molokai-Forgotten Hawaii 191 Beyond the farthest road a primeval world unfolds in the lush valleys of the northeastern coast. The chill waters of Kahiwa Falls (left) drop 1,750 feet to the sea in Hawaii's longest cascade. Deep in the island's forest reserve, spray from another waterfall (above) mingles with the scent of eucalyptus and wild ginger. Amaumau ferns (right, center) stand as tall as six feet. For centuries, Molokai was revered as a place where religious rituals were performed by powerful kahuna, or priests. One of the most famous, Lanikaula, is said to be buried in a grove of kukui trees near the island's eastern tip (below right). To make lamp oil, Hawaiians traditionally took nuts from the kukui, now a symbol of Molokai. -

Ethnohistory of Puna
Research in Action: Ethnohistory of Puna: Davianna Pōmaikaʻi McGregor Praxis: exercise or practice of an art, science or skill. Praxis distinguishes Ethnic Studies from the long-established disciplines of the social sciences. Ethnic Studies faculty are committed to placing research at the service of the community and challenging students to examine and analyze contemporary issues of concern to Hawaiʻi’s ethnic communities from diverse perspectives. The clash between the beliefs, customs, and practices of Hawaiian descendants of Pele (Hawaiian goddess of the volcano) and the developers of geothermal energy is one of the issues which drew upon the resources of Ethnic Studies faculty and students.1 The issue evolved as the federal and state governments partnered with private corporations to clear the largest remaining lowland rainforest in Hawaiʻi for geothermal wells and power plants. In response, Hawaiians filed several civil suits, organized religious ceremonies in the volcanic rainforest, produced documentary films and joined with environmentalists in public protests. A key turning point in the struggle was a ruling by the US federal court that an Environmental Impact Study (EIS) was required for the project to proceed. Where proposed development projects funded by the federal government affect native peoples, new historic preservation laws mandated the inclusion of a cultural impact study in the EIS. Thus, for the first time since the passage of the new laws, a cultural impact study was conducted for native Hawaiians in Hawaiʻi. The First Cultural Impact Study on Native Hawaiians University of Hawaiʻi faculty from the Ethnic Studies Department, the Department of Urban and Regional Planning and the School of Social Work were contracted to conduct the study.2 The team drew upon the individual skills and experiences of their faculty and developed a multi-method approach for the study. -

Albatross Or Mōlī (Phoebastria Immutabilis) Black-Footed Albatross Or Ka’Upu (Phoebastria Nigripes) Short-Tailed Albatross (Phoebastria Albatrus)
Hawaiian Bird Conservation Action Plan Focal Species: Laysan Albatross or Mōlī (Phoebastria immutabilis) Black-footed Albatross or Ka’upu (Phoebastria nigripes) Short-tailed Albatross (Phoebastria albatrus) Synopsis: These three North Pacific albatrosses are demographically similar, share vast oceanic ranges, and face similar threats. Laysan and Black-footed Albatrosses nest primarily in the Northwestern Hawaiian Islands, while the Short-tailed Albatross nests mainly on islands near Japan but forages extensively in U.S. waters. The Short-tailed Albatross was once thought to be extinct but its population has been growing steadily since it was rediscovered in 1951 and now numbers over 3,000 birds. The Laysan is the most numerous albatross species in the world with a population over 1.5 million, but its trend has been hard to determine because of fluctuations in number of breeding pairs. The Black-footed Albatross is one-tenth as numerous as the Laysan and its trend also has been difficult to determine. Fisheries bycatch caused unsustainable mortality of adults in all three species but has been greatly reduced in the past 10-20 years. Climate change and sea level rise are perhaps the greatest long-term threat to Laysan and Black-footed Albatrosses because their largest colonies are on low-lying atolls. Protecting and creating colonies on higher islands and managing non-native predators and human conflicts may become keys to their survival. Laysan, Black-footed, and Short-tailed Albatrosses (left to right), Midway. Photos Eric VanderWerf Status -

Volcanic and Seismic Hazards on the Island of Hawaii
U.S. Department of the Interior / U.S. Geological Survey Volcanic and Seismic Hazards on the Island of Hawaii Volcanic and Seismic Hazards on the Island of Hawaii Lava flows entered Kalapana Gardens in December 1986. Front Cover: View of Kapoho village during the 1960 eruption before it was entirely destroyed. (Photographer unknown) Inside Front Cover (Photograph by J.D. Griggs) For sale by the U.S. Government Printing Office Superintendent of Documents, Mail Stop: SSOP, Washington, DC 20402-9328 ISBN 0-16-038200-9 Preface he eruptions of volcanoes often have direct, dramatic effects on the lives of people and Ton their property. People who live on or near active volcanoes can benefit greatly from clear, scientific information about the volcanic and seismic hazards of the area. This booklet provides such information for the residents of Hawaii so they may effectively deal with the special geologic hazards of the island. Identifying and evaluating possible geologic hazards is one of the principal roles of the U.S. Geological Survey (USGS) and its Hawaiian Volcano Observatory. When USGS scientists recognize a potential hazard, such as an impend ing eruption, they notify the appropriate govern ment officials, who in turn are responsible for advising the public to evacuate certain areas or to take other actions to insure their safety. This booklet was prepared in cooperation with the Hawaii County Civil Defense Agency. Volcanic and Seismic Hazards: Interagency Responsibilities Hawaii County National Park } Civil Defense C Service ./ Short-term hazard evaluation for the agencies responsible for public safety. Information on volcanic U.S. -

APRIL 8, 2020 Featuring Oahu, Kauai & Maui
featuring Oahu, Kauai & Maui MARCH 30 - APRIL 8, 2020 with Host JOJO TURNBEAUGH, Co-Host of Big Al & JoJo on KOA the Valley Isle for the valleys carved YOUR EXPERIENCE INCLUDES into its mountains. Lunch at the Maui • All airfare Ocean Center offers stunning views • All inter-island flights & baggage fees, of Ma’alaea Bay Harbor. After lunch, fuel surcharges, government fees, airport there’s time to browse the center’s & departure taxes (minimum value of unique collection of marine life and $250 per person) their 3D Humpbacks of Hawaii expe- rience. Next, we drive to Lahaina, an • Guaranteed prices & low deposit old whaling port dotted with historical • Holiday Tour Director & local guides landmarks, shops, and galleries. • Baggage handling at hotels The town is especially known for its • $100 travel voucher for a future tour gigantic Banyan tree whose branches JOJO TURNBEAUGH reach out over an acre. Later we 10 Excellent Meals Featuring arrive at the Hyatt Regency Maui • KOA Radio Welcome Lunch in JoJo joins Alfred “Big Al” Williams Resort & Spa for three nights to Honolulu enjoy 40 oceanfront acres of lavish every weekday from 3 p.m. until 7 • Lunch at Kilohana Plantation p.m. for Big Al & JoJo — a show that swimming pools, tropical plants, • Full breakfast buffet at Swan Court combines exclusive Broncos news, the shopping, and multiple dining Hyatt Regency Maui day’s top sports stories, and fun topics options. We have easy access to that make your drive home stress-free. long beach strolls from here and • Holiday Vacations Farewell Lunch a private balcony off your room. -

Hawaii's , Kaho`Olawe Island Section 319 Success Story
Section 319 NONPOINT SOURCE PROGRAM SUCCESS STORY Restoring Native Vegetation Reduces SedimentHawaii Entering Coastal Waters Dry environmental conditions combined with a long history of human Waterbody Improved land use have resulted in severe erosion on Kaho`olawe. Much of the island has been reduced to barren hardpan, and sediment-laden runoff affects nearshore water quality and threatens the coral reef ecosystem. Efforts to minimize erosion and restore native vegetation in two watersheds on Kaho`olawe (Hakioawa and Kaulana) have reduced the amount of sediment entering the stream/gulch systems and coastal waters and have improved the quality of coastal waters, coral reef ecosystems and native wildlife habitat. Problem The island of Kaho`olawe, the smallest of the eight main Hawaiian Islands, is approximately 7 miles southwest of Maui. Kaho`olawe lies within the rain shadow of the volcanic summit of Maui. The island has a unique history. Evidence sug- gests that Hawaiians arrived as early as 1000 A.D. Kaho`olawe served as a navigational center for voyaging, an agricultural center, the site of an adze quarry, and a site for religious and cultural ceremo- nies. More recently, Kaho`olawe was used as a penal colony, a ranch (1858–1941), and a bombing range Figure 1. A lack of vegetation leads to excessive erosion by the U.S. Navy (1938–1990). The island was also on Kaho’olawe, which in turn home to as many as 50,000 goats during a 200-year causes sediment loading into period (1793–1993). Throughout the ranching period, adjacent marine waters. uncontrolled cattle and sheep grazing caused a substantial loss of soil through accelerated erosion. -

RECORDS of the HAWAII BIOLOGICAL SURVEY for 1994 Part 2: Notes1
1 RECORDS OF THE HAWAII BIOLOGICAL SURVEY FOR 1994 Part 2: Notes1 This is the second of two parts to the Records of the Hawaii Biological Survey for 1994 and contains the notes on Hawaiian species of plants and animals including new state and island records, range extensions, and other information. Larger, more comprehensive treatments and papers describing new taxa are treated in the first part of this volume [Bishop Museum Occasional Papers 41]. New Hawaiian Plant Records. I BARBARA M. HAWLEY & B. LEILANI PYLE (Herbarium Pacificum, Department of Natural Sciences, Bishop Museum, P.O. Box 19000A, Honolulu, Hawaii 96817, USA) Amaranthaceae Achyranthes mutica A. Gray Significance. Considered extinct and previously known from only 2 collections: sup- posedly from Hawaii Island 1779, D. Nelson s.n.; and from Kauai between 1851 and 1855, J. Remy 208 (Wagner et al., 1990, Manual of the Flowering Plants of Hawai‘i, p. 181). Material examined. HAWAII: South Kohala, Keawewai Gulch, 975 m, gulch with pasture and relict Koaie, 10 Nov 1991, T.K. Pratt s.n.; W of Kilohana fork, 1000 m, on sides of dry gulch ca. 20 plants seen above and below falls, 350 °N aspect, 16 Dec 1992, K.R. Wood & S. Perlman 2177 (BISH). Caryophyllaceae Silene lanceolata A. Gray Significance. New island record for Oahu. Distribution in Wagner et al. (1990: 523, loc. cit.) limited to Kauai, Molokai, Hawaii, and Lanai. Several plants were later noted by Steve Perlman and Ken Wood from Makua, Oahu in 1993. Material examined. OAHU: Waianae Range, Ohikilolo Ridge at ca. 700 m elevation, off ridge crest, growing on a vertical rock face, facing northward and generally shaded most of the day but in an open, exposed face, only 1 plant noted, 25 Sep 1992, J. -
Annual Weather/Climate Data Summary 2010 Pacific Island Network
National Park Service U.S. Department of the Interior Natural Resource Stewardship and Science Annual Weather/Climate Data Summary 2010 Pacific Island Network Natural Resource Data Series NPS/PACN/NRDS—2012/273 ON THE COVER Sunset at American Memorial Park (AMME), Saipan, Commonwealth of the Northern Mariana Islands. Photograph courtesy of National Park Service staff. Annual Weather/Climate Data Summary 2010 Pacific Island Network Natural Resource Data Series NPS/PACN/NRDS—2012/273 Tonnie L. C. Casey National Park Service Inventory and Monitoring P.O. Box 52 Hawaii National Park, HI 96718 April 2012 U.S. Department of the Interior National Park Service Natural Resource Stewardship and Science Fort Collins, Colorado The National Park Service, Natural Resource Stewardship and Science office in Fort Collins, Colorado publishes a range of reports that address natural resource topics of interest and applicability to a broad audience in the National Park Service and others in natural resource management, including scientists, conservation and environmental constituencies, and the public. The Natural Resource Data Series is intended for the timely release of basic data sets and data summaries. Care has been taken to assure accuracy of raw data values, but a thorough analysis and interpretation of the data has not been completed. Consequently, the initial analyses of data in this report are provisional and subject to change. All manuscripts in the series receive the appropriate level of peer review to ensure that the information is scientifically credible, technically accurate, appropriately written for the intended audience, and designed and published in a professional manner. Data in this report were collected and analyzed using methods based on established, peer- reviewed protocols and were analyzed and interpreted within the guidelines of the protocols. -

Mechanism of the 1975 Kalapana, Hawaii, Earthquake Inferred from Tsunami Data
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 104, NO. B6, PAGES 13,153-13,167, JUNE 10, 1999 Mechanism of the 1975 Kalapana, Hawaii, earthquake inferred from tsunami data Kuo-Fong Ma Institute of Geophysics, National Central University, Chung-Li, Taiwan Hiroo Kanamori Seismological Laboratory, California Institute of Technology, Pasadena Kenji Satake Seismotectonics Section, Geological Survey of Japan, Tsukuba, Japan Abstract. We investigated the source mechanism of the 1975 Kalapana, Hawaii, earthquake (Ms= 7.2) by modeling the tsunamis observed at three tide-gauge stations, Hilo, Kahului, and Honolulu. We computed synthetic tsunamis for various fault models. The arrival times and the amplitudes of the synthetic tsunamis computed for Ando's fault model (fault length= 40 km, fault width= 20 km, strike= N70°E, dip= 20°SE, rake= -90°, fault depth= 10 km, and slip= 5.6 m) are - 10 min earlier and 5 times smaller than those of the observed, respectively. We tested fault models with different dip angles and depths. Models with a northwest dip direction yield larger tsunami amplitudes than those with a southeast dip direction. Models with shallower fault depths produce later first arrivals than deeper models. We also considered the effects of the Hilina fault system, but its contribution to tsunami excitation is insignificant. This suggests that another mechanism is required to explain the tsunamis. One plausible model is a propagating slump model with a l m subsidence along the coast and a 1 m uplift offshore. This model can explain the arrival times and the amplitudes of the observed tsunamis satisfactorily. An alternative model is a wider fault model that dips l 0°NW, with its fault plane extending 25 km offshore, well beyond the aftershock area of the Kalapana earthquake.