Exploring Pulsar-Black Hole Binaries Using the Next
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Star Newsletter
THE HOT STAR NEWSLETTER ? An electronic publication dedicated to A, B, O, Of, LBV and Wolf-Rayet stars and related phenomena in galaxies ? No. 70 2002 July-August http://www.astro.ugto.mx/∼eenens/hot/ editor: Philippe Eenens http://www.star.ucl.ac.uk/∼hsn/index.html [email protected] ftp://saturn.sron.nl/pub/karelh/uploads/wrbib/ Contents of this newsletter Call for Data . 1 Abstracts of 12 accepted papers . 2 Abstracts of 2 submitted papers . 10 Abstracts of 6 proceedings papers . 11 Jobs .......................................................................13 Meetings ...................................................................14 Call for Data The multiplicity of 9 Sgr G. Rauw and H. Sana Institut d’Astrophysique, Universit´ede Li`ege,All´eedu 6 Aoˆut, BˆatB5c, B-4000 Li`ege(Sart Tilman), Belgium e-mail: [email protected], [email protected] The non-thermal radio emission observed for a number of O and WR stars implies the presence of a small population of relativistic electrons in the winds of these objects. Electrons could be accelerated to relativistic velocities either in the shock region of a colliding wind binary (Eichler & Usov 1993, ApJ 402, 271) or in the shocks due to intrinsic wind instabilities of a single star (Chen & White 1994, Ap&SS 221, 259). Dougherty & Williams (2000, MNRAS 319, 1005) pointed out that 7 out of 9 WR stars with non-thermal radio emission are in fact binary systems. This result clearly supports the colliding wind scenario. In the present issue of the Hot Star Newsletter, we announce the results of a multi-wavelength campaign on the O4 V star 9 Sgr (= HD 164794; see the abstract by Rauw et al.). -

SXP 1062, a Young Be X-Ray Binary Pulsar with Long Spin Period⋆
A&A 537, L1 (2012) Astronomy DOI: 10.1051/0004-6361/201118369 & c ESO 2012 Astrophysics Letter to the Editor SXP 1062, a young Be X-ray binary pulsar with long spin period Implications for the neutron star birth spin F. Haberl1, R. Sturm1, M. D. Filipovic´2,W.Pietsch1, and E. J. Crawford2 1 Max-Planck-Institut für extraterrestrische Physik, Giessenbachstraße, 85748 Garching, Germany e-mail: [email protected] 2 University of Western Sydney, Locked Bag 1797, Penrith South DC, NSW1797, Australia Received 31 October 2011 / Accepted 1 December 2011 ABSTRACT Context. The Small Magellanic Cloud (SMC) is ideally suited to investigating the recent star formation history from X-ray source population studies. It harbours a large number of Be/X-ray binaries (Be stars with an accreting neutron star as companion), and the supernova remnants can be easily resolved with imaging X-ray instruments. Aims. We search for new supernova remnants in the SMC and in particular for composite remnants with a central X-ray source. Methods. We study the morphology of newly found candidate supernova remnants using radio, optical and X-ray images and inves- tigate their X-ray spectra. Results. Here we report on the discovery of the new supernova remnant around the recently discovered Be/X-ray binary pulsar CXO J012745.97−733256.5 = SXP 1062 in radio and X-ray images. The Be/X-ray binary system is found near the centre of the supernova remnant, which is located at the outer edge of the eastern wing of the SMC. The remnant is oxygen-rich, indicating that it developed from a type Ib event. -

10. Scientific Programme 10.1
10. SCIENTIFIC PROGRAMME 10.1. OVERVIEW (a) Invited Discourses Plenary Hall B 18:00-19:30 ID1 “The Zoo of Galaxies” Karen Masters, University of Portsmouth, UK Monday, 20 August ID2 “Supernovae, the Accelerating Cosmos, and Dark Energy” Brian Schmidt, ANU, Australia Wednesday, 22 August ID3 “The Herschel View of Star Formation” Philippe André, CEA Saclay, France Wednesday, 29 August ID4 “Past, Present and Future of Chinese Astronomy” Cheng Fang, Nanjing University, China Nanjing Thursday, 30 August (b) Plenary Symposium Review Talks Plenary Hall B (B) 8:30-10:00 Or Rooms 309A+B (3) IAUS 288 Astrophysics from Antarctica John Storey (3) Mon. 20 IAUS 289 The Cosmic Distance Scale: Past, Present and Future Wendy Freedman (3) Mon. 27 IAUS 290 Probing General Relativity using Accreting Black Holes Andy Fabian (B) Wed. 22 IAUS 291 Pulsars are Cool – seriously Scott Ransom (3) Thu. 23 Magnetars: neutron stars with magnetic storms Nanda Rea (3) Thu. 23 Probing Gravitation with Pulsars Michael Kremer (3) Thu. 23 IAUS 292 From Gas to Stars over Cosmic Time Mordacai-Mark Mac Low (B) Tue. 21 IAUS 293 The Kepler Mission: NASA’s ExoEarth Census Natalie Batalha (3) Tue. 28 IAUS 294 The Origin and Evolution of Cosmic Magnetism Bryan Gaensler (B) Wed. 29 IAUS 295 Black Holes in Galaxies John Kormendy (B) Thu. 30 (c) Symposia - Week 1 IAUS 288 Astrophysics from Antartica IAUS 290 Accretion on all scales IAUS 291 Neutron Stars and Pulsars IAUS 292 Molecular gas, Dust, and Star Formation in Galaxies (d) Symposia –Week 2 IAUS 289 Advancing the Physics of Cosmic -

A Planet Made of Diamond (W/ Video) 25 August 2011
A planet made of diamond (w/ video) 25 August 2011 beam of radio waves. As the star spins and the radio beam sweeps repeatedly over Earth, radio telescopes detect a regular pattern of radio pulses. For the newly discovered pulsar, known as PSR J1719-1438, the astronomers noticed that the arrival times of the pulses were systematically modulated. They concluded that this was due to the gravitational pull of a small companion planet, orbiting the pulsar in a binary system. The pulsar and its planet are part of the Milky Way's plane of stars and lie 4,000 light-years away in the constellation of Serpens (the Snake). The system is about an eighth of the way towards the Galactic Centre from the Earth. The modulations in the radio pulses tell An artist's visualisation of the pulsar and its orbiting astronomers a number of things about the planet. planet. Image credit - Swinburne Astronomy Productions First, it orbits the pulsar in just two hours and ten minutes, and the distance between the two objects is 600,000 km-a little less than the radius of our A once-massive star that's been transformed into a Sun. small planet made of diamond: that is what University of Manchester astronomers think they've Second, the companion must be small, less than found in the Milky Way. 60,000 km (that's about five times the Earth's diameter). The planet is so close to the pulsar that, The discovery has been made by an international if it were any bigger, it would be ripped apart by the research team, led by Professor Matthew Bailes of pulsar's gravity. -

Origin and Binary Evolution of Millisecond Pulsars
Origin and binary evolution of millisecond pulsars Francesca D’Antona and Marco Tailo Abstract We summarize the channels formation of neutron stars (NS) in single or binary evolution and the classic recycling scenario by which mass accretion by a donor companion accelerates old NS to millisecond pulsars (MSP). We consider the possible explanations and requirements for the high frequency of the MSP population in Globular Clusters. Basics of binary evolution are given, and the key concepts of systemic angular momentum losses are first discussed in the framework of the secular evolution of Cataclysmic Binaries. MSP binaries with compact companions represent end-points of previous evolution. In the class of systems characterized by short orbital period %orb and low companion mass we may instead be catching the recycling phase ‘in the act’. These systems are in fact either MSP, or low mass X–ray binaries (LMXB), some of which accreting X–ray MSP (AMXP), or even ‘transitional’ systems from the accreting to the radio MSP stage. The donor structure is affected by irradiation due to X–rays from the accreting NS, or by the high fraction of MSP rotational energy loss emitted in the W rays range of the energy spectrum. X– ray irradiation leads to cyclic LMXB stages, causing super–Eddington mass transfer rates during the first phases of the companion evolution, and, possibly coupled with the angular momentum carried away by the non–accreted matter, helps to explain ¤ the high positive %orb’s of some LMXB systems and account for the (apparently) different birthrates of LMXB and MSP. Irradiation by the MSP may be able to drive the donor to a stage in which either radio-ejection (in the redbacks) or mass loss due to the companion expansion, and ‘evaporation’ may govern the evolution to the black widow stage and to the final disruption of the companion. -

Gravity Tests with Radio Pulsars
universe Review Gravity Tests with Radio Pulsars Norbert Wex 1,* and Michael Kramer 1,2 1 Max-Planck-Institut für Radioastronomie, Auf dem Hügel 69, D-53121 Bonn, Germany; [email protected] 2 Jodrell Bank Centre for Astrophysics, School of Physics and Astronomy, The University of Manchester, Manchester M13 9PL, UK * Correspondence: [email protected] Received: 19 August 2020; Accepted: 17 September 2020; Published: 22 September 2020 Abstract: The discovery of the first binary pulsar in 1974 has opened up a completely new field of experimental gravity. In numerous important ways, pulsars have taken precision gravity tests quantitatively and qualitatively beyond the weak-field slow-motion regime of the Solar System. Apart from the first verification of the existence of gravitational waves, binary pulsars for the first time gave us the possibility to study the dynamics of strongly self-gravitating bodies with high precision. To date there are several radio pulsars known which can be utilized for precision tests of gravity. Depending on their orbital properties and the nature of their companion, these pulsars probe various different predictions of general relativity and its alternatives in the mildly relativistic strong-field regime. In many aspects, pulsar tests are complementary to other present and upcoming gravity experiments, like gravitational-wave observatories or the Event Horizon Telescope. This review gives an introduction to gravity tests with radio pulsars and its theoretical foundations, highlights some of the most important results, and gives a brief outlook into the future of this important field of experimental gravity. Keywords: gravity; general relativity; pulsars 1. -
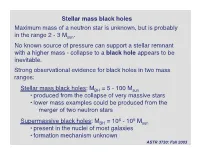
Stellar Mass Black Holes Maximum Mass of a Neutron Star Is Unknown, but Is Probably in the Range 2 - 3 Msun
Stellar mass black holes Maximum mass of a neutron star is unknown, but is probably in the range 2 - 3 Msun. No known source of pressure can support a stellar remnant with a higher mass - collapse to a black hole appears to be inevitable. Strong observational evidence for black holes in two mass ranges: Stellar mass black holes: MBH = 5 - 100 Msun • produced from the collapse of very massive stars • lower mass examples could be produced from the merger of two neutron stars 6 9 Supermassive black holes: MBH = 10 - 10 Msun • present in the nuclei of most galaxies • formation mechanism unknown ASTR 3730: Fall 2003 Other types of black hole could exist too: 3 Intermediate mass black holes: MBH ~ 10 Msun • evidence for the existence of these from very luminous X-ray sources in external galaxies (L >> LEdd for a stellar mass black hole). • `more likely than not’ to exist, but still debatable Primordial black holes • formed in the early Universe • not ruled out, but there is no observational evidence and best guess is that conditions in the early Universe did not favor formation. ASTR 3730: Fall 2003 Basic properties of black holes Black holes are solutions to Einstein’s equations of General Relativity. Numerous theorems have been proved about them, including, most importantly: The `No-hair’ theorem A stationary black hole is uniquely characterized by its: • Mass M Conserved • Angular momentum J quantities • Charge Q Remarkable result: Black holes completely `forget’ how they were made - from stellar collapse, merger of two existing black holes etc etc… Only applies at late times. -

Stellar Evolution
AccessScience from McGraw-Hill Education Page 1 of 19 www.accessscience.com Stellar evolution Contributed by: James B. Kaler Publication year: 2014 The large-scale, systematic, and irreversible changes over time of the structure and composition of a star. Types of stars Dozens of different types of stars populate the Milky Way Galaxy. The most common are main-sequence dwarfs like the Sun that fuse hydrogen into helium within their cores (the core of the Sun occupies about half its mass). Dwarfs run the full gamut of stellar masses, from perhaps as much as 200 solar masses (200 M,⊙) down to the minimum of 0.075 solar mass (beneath which the full proton-proton chain does not operate). They occupy the spectral sequence from class O (maximum effective temperature nearly 50,000 K or 90,000◦F, maximum luminosity 5 × 10,6 solar), through classes B, A, F, G, K, and M, to the new class L (2400 K or 3860◦F and under, typical luminosity below 10,−4 solar). Within the main sequence, they break into two broad groups, those under 1.3 solar masses (class F5), whose luminosities derive from the proton-proton chain, and higher-mass stars that are supported principally by the carbon cycle. Below the end of the main sequence (masses less than 0.075 M,⊙) lie the brown dwarfs that occupy half of class L and all of class T (the latter under 1400 K or 2060◦F). These shine both from gravitational energy and from fusion of their natural deuterium. Their low-mass limit is unknown. -

Seeking and Blundering by Katie Davis
Seeking and Blundering by Katie Davis [Music] Katie Davis: I’m Katie Davis with a story. An old, moldy one. [Music] Susan Byrnes: So, this image of penicillin mold looks as if you’re looking down on an island almost in a yellow sea looking on – down onto treetops almost with a kind of little, tiny spines and surrounded by a circle of white that then becomes this kind of milky, yellow field that it’s in. So it seems like we’re looking at a close-up of…a close-up of something in a petri dish. Katie Davis: Susan Byrnes, an Ohio artist, likes the color and the movement of mold. Mold is unruly: sometimes sly, temperamental, surprising, spongy or slimy, and it’s best to wash it off with bleach. That’s what we do with mold. Susan Byrnes: As it moves out it’s almost as if there’s this sort of feathery, whiter field around the outside of it and it’s…you can see how the mold has migrated because outside of that ring is the beginnings of another bit of mold growing. And you can see… Katie Davis: Enough with the mold, you’re thinking. Hang on, here’s the backstory. London, 1928. Biologist Alexander Fleming had a messy lab. There were test tubes, beakers, rubber bands, string, and petri dishes. And this story of a mistake has been told and retold. Researchers have questioned some details, and still it survives – like mold, reemerging in books, movies, and cartoons. Cartoon: Having been brought up on a farm in Scotland, scientist Alexander Fleming wasn’t afraid of getting his hands dirty examining nasty bacteria like staphylococcus aureus which in humans as well as horses can cause death as well as vomiting and boils. -

3677 Life in the Universe: Extra-Solar Planets Dr
DEPARTMENT OF PHYSICS AND ASTRONOMY 3677 Life in the Universe: Extra-solar planets Dr. Matt Burleigh www.star.le.ac.uk/mrb1/lectures.html Course outline • Lecture 1 – Definition of a planet – A little history – Pulsar planets – Doppler “wobble” (radial velocity) technique • Lecture 2 – Transiting planets – Transit search projects – Detecting the atmospheres of transiting planets: secondary eclipses & transmission spectroscopy – Transit timing variations Dr. Matt Burleigh 3677: Life in the Universe Course outline • Lecture 3 – Microlensing – Direct Imaging – Other methods: astrometry, eclipse timing – Planets around evolved stars • Lecture 4 – Statistics: mass and orbital distributions, incidence of solar systems, etc. – Hot Jupiters – Super-Earths – Planetary formation – Planetary atmospheres – The host stars Dr. Matt Burleigh 3677: Life in the Universe Course outline • Lecture 5 – The quest for an Earth-like planet – Habitable zones – Results from the Kepler mission • How common are rocky planets? • Amazing solar systems – Biomarkers – Future telescopes and space missions Dr. Matt Burleigh 3677: Life in the Universe Useful web sites • Extra-solar planets encyclopaedia: exoplanets.eu • Exoplanet Data Explorer (California Planet Survey): exoplanets.org • NASA exoplanet archive: exoplanetarchive.ipac.caltech.edu • Planet hunters (Zooniverse): www.planethunters.org • Kepler mission: kepler.nasa.gov • Next Generation Transit Survey: www.ngtransits.org Dr. Matt Burleigh 3677: Life in the Universe Useful books • Extrasolar planets & Astrobiology: -
European VLBI Network Newsletter Number 5 May 2003 EVN User JIVE Newsletter Publications Meetings Proposals Homepage Support Homepage Archive
European VLBI Network: Newsletter 5 - May 2003 Página 1 de 10 European VLBI Network Newsletter Number 5 May 2003 EVN User JIVE Newsletter Publications Meetings Proposals Homepage Support Homepage Archive Contents 1. Call for Proposals - Deadline 1 June 2003 2. Report from the Chairman of the CBD of the EVN 3. HRH Prince Charles Rededicates the Lovell Telescope 4. Problems with the Effelsberg Track 5. EVN Achieves e-VLBI 1 Gbps Fringes 6. Report on the 2nd e-VLBI Workshop held at JIVE, Dwingeloo, 15-16 May 2003 7. The First Step Towards a Deep Extragalactic VLBI-Optical Survey (DEVOS) 8. High-sensitivity Observations of Radio Supernovae in Arp 220 1. Call for Proposals - Deadline 1 June 2003 Observing proposals are invited for the EVN, a VLBI network of radio telescopes in Europe and beyond operated by an international Consortium of institutes (http://www.evlbi.org). The EVN is open to all astronomers, and encourages use of the Network by astronomers not specialised in the VLBI technique. The Joint Institute for VLBI in Europe, JIVE (http://www.jive.nl), can provide support and advice on project preparation, scheduling, correlation and analysis. See htmlhttp://www.evlbi.org/support/evn_support.html. Complete a coversheet (now available in LaTeX format) and attach a scientific justification (maximum 2 pages). Up to 2 additional pages with diagrams may be included; the total, including cover sheet, should not exceed 6 pages. See http://www.evlbi.org/proposals/prop.html. The detailed "Call for Proposals" has further information on Global VLBI, EVN+MERLIN and guidelines for proposal submission: see http://www.obs.u-bordeaux1.fr/vlbi/EVN/call-long.html. -

SKA Newsetter Volume 1
SKA Newsetter Volume 1 International Square Kilometre Array Newsletter Volume 1 February 2000 Greetings. This is the first newsletter of the International Square Kilometre Array project.� The SKA project has enjoyed rapid development on the international front in the past year.� An international SKA Steering Committee (ISSC) has been established, with representation from the 7 countries that are signatories to the Memorandum of Understanding for Research and Development (Australia, Canada, China, India, The Netherlands, the U.K., and the USA).� The mandate of the ISSC includes to provide international oversight and a coordinating body, to establish agreed goals and timelines for the SKA project, to organize a joint international technical and scientific proposal for the SKA and, to this end, to establish and oversee working groups as necessary.�� The ISSC meets twice per year.� The inaugural meeting was held in Dwingeloo in February 1999.� A second meeting occurred in Toronto in August.� The third gathering will take place in Munich at the end of March. The first steps are being taken to establish a European SKA Consortium to coordinate the efforts in Europe. This is being done in the context of an EU-funded Infrastructure Cooperation Network in Radio Astronomy.��� Another area of very significant progress in the past year has been the continued organisation of national projects within the participating countries.� This first newsletter is devoted to reports of activities from correspondents in MOU countries.� Efforts around the world