Electric Motors Ebook, Epub
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
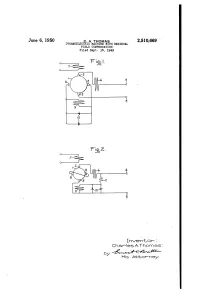
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

Study on Line-Start Permanent Magnet Assistance Synchronous Reluctance Motor for Improving Efficiency and Power Factor
energies Article Study on Line-Start Permanent Magnet Assistance Synchronous Reluctance Motor for Improving Efficiency and Power Factor Hyunwoo Kim 1 , Yeji Park 1, Huai-Cong Liu 2, Pil-Wan Han 3 and Ju Lee 1,* 1 Department of Electrical Engineering, Hanyang University, Seoul 04763, Korea; [email protected] (H.K.); [email protected] (Y.P.) 2 Hyundai Transys, Hwaseong 18280, Korea; [email protected] 3 Electric Machines and Drives Research Center, Korea Electrotechnology Research Institute, Changwon 51543, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-2220-0342 Received: 12 December 2019; Accepted: 9 January 2020; Published: 13 January 2020 Abstract: In order to improve the efficiency, a line-start synchronous reluctance motor (LS-SynRM) is studied as an alternative to an induction motor (IM). However, because of the saliency characteristic of SynRM, LS-SynRM have a limited power factor. Therefore, to improve the efficiency and power factor of electric motors, we propose a line-start permanent magnet assistance synchronous reluctance motor (LS-PMA-SynRM) with permanent magnets inserted into LS-SynRM. IM and LS-SynRM are selected as reference models, whose performances are analyzed and compared with that of LS-PMA-SynRM using a finite element analysis. The performance of LS-PMA-SynRM is analyzed considering the position and length of its permanent magnet, as well as its manufacture. The final model of LS-PMA-SynRM is designed for improving the efficiency and power factor of electric motors compared with LS-SynRM. To verify the finite element analysis (FEA) result, the final model is manufactured, experiments are conducted, and the performance of LS-PMA-SynRM is verified. -

Stepper Motor Or Servo Motor: Which Should It Be?
Stepper Motor or Servo Motor: Which Should It Be? Engineer the Exceptional ENGINEER THE EXCEPTIONAL ENGINEER THE EXCEPTIONAL Stepper Motor or Servo Motor: Which Should It Be? Engineer the Exceptional ENGINEER THE EXCEPTIONAL Each technology has its niche, and since the selection of either stepper or servo ENGINEER THE EXCEPTIONAL technology affects the likelihood of success, it is important that the machine designer consider the technical advantages and disadvantages of both to select the best motor-drive system for an application. Machine designers should not limit utilization of steppers or servos This article presents an overview of stepper according to a fixed mindset or comfort level, but should learn where and servo capabilities to serve as selection each technology works best for controlling a specific mechanism and criteria between the two technologies. process to be performed. A thorough understanding of these technologies will help you achieve optimum Today’s digital stepper motor drives provide enhanced drive features, mechatronic designs to bring out the full option flexibility and communication protocols using advanced capabilities of your machine. integrated circuits and simplified programming techniques. The same is true of servo motor systems, while higher torque density, improved electronics, advanced algorithms and higher feedback resolution have resulted in higher system bandwidth capabilities as well as lower initial and overall operating costs for many applications. STEPPER MOTOR SYSTEM OVERVIEW Stepper motors have several major advantages over servo systems. They typically cost less, have common NEMA mountings, offer lower-torque options, require less-costly cabling, and their open-loop motion control simplifies machine integration and operation. -

Overlapped Electromagnetic Coilgun for Low Speed Projectiles
ISSN (Print) 1226-1750 ISSN (Online) 2233-6656 Journal of Magnetics 20(3), 322-329 (2015) http://dx.doi.org/10.4283/JMAG.2015.20.3.322 Overlapped Electromagnetic Coilgun for Low Speed Projectiles Hany M. Mohamed1, Mahmoud A. Abdalla2*, Abdelazez Mitkees, and Waheed Sabery Electrical Engineering Branch, MTC College, Cairo, Egypt [email protected] [email protected] (Received 20 February 2015, Received in final form 16 June 2015, Accepted 16 June 2015) This paper presents a new overlapped coilgun configuration to launch medium weight projectiles. The proposed configuration consists of a two-stage coilgun with overlapped coil covers with spacing between them. The theoretical operation of a multi-stage coilgun is introduced, and a transient simulation was conducted for projectile motion through the launcher by using a commercial transient finite element software, ANSOFT MAXWELL. The excitation circuit design for each coilgun is reported, and the results indicate that the overlapped configuration increased the exit velocity relative to a non-overlapped configuration. Different configurations in terms of the optimum length and switching time were attempted for the proposed structure, and all of these cases exhibited an increase in the exit velocity. The exit velocity tends to increase by 27.2% relative to that of a non-overlapped coilgun of the same length. Keywords : electromagnetic launch, excitation circuit, lorentz force, overlapped coilgun 1. Introduction is not easy to obtain the main performance parameters and optimize the design [3]. Electromagnetic (EM) launch technology is a strong Sandia National Laboratories has succeeded in coilgun candidate to launch objects with high velocities over long design and operations by developing four guns with distances. -

Stepping Motors Fundamentals
AN907 Stepping Motors Fundamentals Author: Reston Condit TYPES OF STEPPING MOTORS Microchip Technology Inc. There are three basic types of stepping motors: Dr. Douglas W. Jones permanent magnet, variable reluctance and hybrid. University of Iowa This application note covers all three types. Permanent magnet motors have a magnetized rotor, while variable reluctance motors have toothed soft-iron rotors. Hybrid INTRODUCTION stepping motors combine aspects of both permanent Stepping motors fill a unique niche in the motor control magnet and variable reluctance technology. world. These motors are commonly used in measure- The stator, or stationary part of the stepping motor ment and control applications. Sample applications holds multiple windings. The arrangement of these include ink jet printers, CNC machines and volumetric windings is the primary factor that distinguishes pumps. Several features common to all stepper motors different types of stepping motors from an electrical make them ideally suited for these types of point of view. From the electrical and control system applications. These features are as follows: perspective, variable reluctance motors are distant 1. Brushless – Stepper motors are brushless. The from the other types. Both permanent magnet and commutator and brushes of conventional hybrid motors may be wound using either unipolar motors are some of the most failure-prone windings, bipolar windings or bifilar windings. Each of components, and they create electrical arcs that these is described in the sections below. are undesirable or dangerous in some environments. Variable Reluctance Motors 2. Load Independent – Stepper motors will turn at Variable Reluctance Motors (also called variable a set speed regardless of load as long as the switched reluctance motors) have three to five load does not exceed the torque rating for the windings connected to a common terminal. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles
Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles W.A. Walls and M. Driga Department of Electrical and Computer Engineering The University of Texas at Austin Austin, Texas 78712 Abstract than not, these test machines were merely modified gener- ators fitted with damper bars to lower impedance suffi- As technology for hybrid-electric propulsion, electric ciently to allow brief high current pulses needed for the weapons and defensive systems are developed for future experiment at hand. The late 1970's brought continuing electric combat vehicles, pulsed rotating electric machine research in fusion power, renewed interest in electromag- technologies can be adapted and evolved to provide the netic guns and other pulsed power users in the high power, maximum benefit to these new systems. A key advantage of intermittent duty regime. Likewise, flywheels have been rotating machines is the ability to design for combined used to store kinetic energy for many applications over the requirements of energy storage and pulsed power. An addi - years. In some cases (like utility generators providing tran- tional advantage is the ease with which these machines can sient fault ride-through capability), the functions of energy be optimized to service multiple loads. storage and power generation have been combined. Continuous duty alternators can be optimized to provide Development of specialized machines that were optimized prime power energy conversion from the vehicle engine. for this type of pulsed duty was needed. In 1977, the laser This paper, however, will focus on pulsed machines that are fusion community began looking for an alternative power best suited for intermittent and pulsed loads requiring source to capacitor banks for driving laser flashlamps. -

DRM105, PM Sinusoidal Motor Vector Control with Quadrature
PM Sinusoidal Motor Vector Control with Quadrature Encoder Designer Reference Manual Devices Supported: MCF51AC256 Document Number: DRM105 Rev. 0 09/2008 How to Reach Us: Home Page: www.freescale.com Web Support: http://www.freescale.com/support USA/Europe or Locations Not Listed: Freescale Semiconductor, Inc. Technical Information Center, EL516 2100 East Elliot Road Tempe, Arizona 85284 1-800-521-6274 or +1-480-768-2130 www.freescale.com/support Europe, Middle East, and Africa: Freescale Halbleiter Deutschland GmbH Technical Information Center Information in this document is provided solely to enable system and Schatzbogen 7 software implementers to use Freescale Semiconductor products. There are 81829 Muenchen, Germany no express or implied copyright licenses granted hereunder to design or +44 1296 380 456 (English) fabricate any integrated circuits or integrated circuits based on the +46 8 52200080 (English) information in this document. +49 89 92103 559 (German) +33 1 69 35 48 48 (French) www.freescale.com/support Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, Japan: representation or guarantee regarding the suitability of its products for any Freescale Semiconductor Japan Ltd. particular purpose, nor does Freescale Semiconductor assume any liability Headquarters arising out of the application or use of any product or circuit, and specifically ARCO Tower 15F disclaims any and all liability, including without limitation consequential or 1-8-1, Shimo-Meguro, Meguro-ku, incidental damages. “Typical” parameters that may be provided in Freescale Tokyo 153-0064 Semiconductor data sheets and/or specifications can and do vary in different Japan applications and actual performance may vary over time. -
Stepper Motor
STEPPER MOTOR Stepper motors are used in a wide variety of applications, including computer peripherals like printers, scanners, CD drives, camera lenses, etc. In this first article, in a series of articles on stepper motors, we will introduce the reader to the theory behind the working and control of a stepper motor. Stepper Motor Basics A Stepper Motor just like any other motor, converts electrical energy into mechanical energy. A stepper motor consists of the following parts: Stator The stationary part of the motor. In a stepper motor, the stator is a set of electromagnets. Rotor The non-stationary part of the motor. In a stepper motor, the rotor is a permanent magnet. The arrangement of the electromagnets and the permanent magnets in a simple stepper motor is shown in the following diagram. Stepper Motor Construction Stepper Motor Operation Stepper Motor Operation When each of the electromagnet pairs is energized successively, the permanent magnet is attracted to the electromagnet, and aligns with it. This results in rotation of the permanent magnet. This is illustrated in “Stepper Motor Operation” diagram. The stepper motor gets its name from the fact that the rotor rotates in discrete step increments. The simple stepper motor has a step angle of 90 degrees. More complex stepper motors can have step angles as low as 3.6 degrees. These stepper motors have more no. of poles in the rotor. A complex stepper motor is shown in below diagram. The dark grey areas on the rotor are South poles and light grey areas on the rotor are North poles. -
Modeling, Analogue and Tests of an Electric Machine
MODELING, ANALOGUE AND TESTS OF AN ELECTRIC MACHINE VOLTAGE CONTROL SYSTEM 'by GRAHAM E.' DAWSON ( j B.A.Sc, University of British. Columbia, 1963. A THESIS SUBMITTED IN PARTIAL FULFILMENT OF THE REQUIREMENTS, FOR THE DEGREE OF MASTER OF APPLIED SCIENCE. in the Department of Electrical Engineering We accept this thesis as conforming to the required standard Members of the Committee Head of the Department .»»«... Members of the Department of Electrical Engineering THE UNIVERSITY OF BRITISH COLUMBIA September, 1966 In presenting this thesis in partial fulfilment of the requirements for an advanced degree at the University of British Columbia, I agree that the Library shall make it freely.avai1able for reference and study. I further agree that permission for ex• tensive copying of this thesis for scholarly purposes may be granted by the Head of my Department or by his representatives.. It is understood that copying or publication of this thesis for finan• cial gain shall not be allowed without my.written permission. Department of Electrical Engineering The University of British Columbia Vancou ve r.,8, Canada Date 7. MM ABSTRACT This thesis is concerned with the modeling, analogue and tests of an interconnected four electric machine voltage control system. Many analogue studies of electric machines have been done but most are concerned with the development of analogue techniques and only a few give substantiation of the validity of the analogue models through comparison of results from analogue studies and from real machine tests. Chapter 2 describes the procedure and the system under study. Chapter 3 describes the methods used for the determination of the electrical and mechanical system parameters. -

A Novel Power Inverter for Switched Reluctance Motor Drives
A Novel Power Inverter for Switched Reluctance Motor Drives Zeljko Grbo, Slobodan Vukosavic, Member IEEE, Emil Levi, Senior Member IEEE Abstract − Although apparently simpler, the SRM drives are negligible variation in phase self-inductance with rotor nowadays more expensive than their conventional AC drive position and torque production results due to variation of the counterparts. This is to a great extent caused by the lack of a mutual inductance between adjacent phases. In terms of this standardised power electronic converter for SRM drives, which subdivision, this paper concentrates on the short pitched would be available on the market as a single module. A number SRMs. The development and explanation of the power of attempts were therefore made in recent times to develop novel power electronic converter structures for SRM drives, based on electronic converter topology, as well as the experimental the utilisation of a three-phase voltage source inverter (VSI), results, are given for a three-phase 6/4 pole SRM. which is readily available as a single module. This paper follows A number of power electronic converter topologies have this line of thought and presents a novel power electronic been developed over the years exclusively for use in converter topology for SRM drives, which is entirely based on conjunction with SRM drives. In principle, the quest has utilisation of standard inverter legs. One of its most important always been for a converter with a minimum number of feature is that both magnetising and demagnetising voltage may switches [4]. An excellent review of numerous power reach the DC-bus voltage level while being contemporarily electronic converter configurations for SRM drives is applied during the conduction overlap in the SRM adjacent available in [2], while some very insightful comparisons of phases. -

Electromagnetic Flyer Plate Technology and Development of a Novel Current Distribution Sensor
Electromagnetic Flyer Plate Technology and Development of a Novel Current Distribution Sensor A doctoral thesis by Kaashif A. M. Omar (MPhys. Physics with Astrophysics, University of Leicester, 2007) Submitted in partial fulfilment of the requirements for the award of the degree of Doctor of Philosophy of Loughborough University November 2014 To the School of Electronic, Electrical and Systems Engineering, Loughborough University, Loughborough, UK © British Crown Owned Copyright 2014/AWE Acknowledgements With the grace and blessing of Allah (SWT), I have been able to complete this work, and I hope to continue in the pursuit of knowledge as is commanded by him… Completing this research project and writing up this thesis has been full of ups and downs and it has been a very long journey, I can vaguely recall a young(er) single scientist who began this work not knowing where it would lead to; now, I am happily married to my wife Humna, having just celebrated our first wedding anniversary, and about to start the next big chapter in my life, which is to become a father… On that note I would like to take this opportunity to firstly thank my father, Mr Abdul Majid Omar and my mother, Mrs Shenaz A M Omar; who have always encouraged me to push myself and instilled within me the confidence that I can achieve anything I put my mind to. Without their constant support I would never have even been able to complete my first degree In physics with Astrophysics at Leicester University, let alone have the opportunity to complete a PhD.